物质点法最新研究大放送——软体机器人,拓扑优化联合应用
文一:

材料点法对土石混合边坡破坏机理的数值研究
摘要:
为准确分析土石混合边坡的大变形破坏机理,提出了一种建立土石混合边坡材料点法模型的新技术。首先,通过数字图像处理技术获得自然的块体轮廓,然后利用离散傅立叶变换理论对块体轮廓进行分析和重构。其次,将随机放置算法与数字图像处理技术相结合,构建了MPM的土石混合边坡离散模型。此外,利用MPM,详细研究了岩石块体的含量、大小和形态对边坡破坏机制的影响。结果表明,岩块的含量、特征和空间分布对边坡的破坏特征有显著影响。由于岩块的存在,边坡破坏时的塑性区变得异常复杂,表现出多种滑动区域和破坏模式。

图:MPM 的计算过程。

图:岩块的分析与重构过程。

图:不同块体含量的土石混合边坡失稳前后的特征: a (0%)、 b (20%)、 c (30%)、 d (40%)、 e (50%)。
文二:

基于定位检测和摩擦自接触的扩展材料点法(XMPM)剪切带演化及失效后仿真
摘要:
提出了一种改进的 XMPM 公式来模拟剪切带的演化和大变形破坏后的行为。本文将基于分岔理论的定位搜索算法集成到 XMPM 中,用于预测结构不连续性的产生和传播。此外,本文还提出了一种自接触公式来处理生成的剪切面之间的动态摩擦接触机制。为了保证局部化传播过程中不连续面的光滑性,采用水平集方法和点云方法,对不连续面进行了隐-显混合描述。通过数值算例验证了所提出的 XMPM 方法在二维和三维模拟不同工程问题剪切带演化过程中的精度,并验证了该方法的有效性。在预测剪切带路径时,所提出的公式对于网格细化也表现出较小的灵敏度。为了显示与常规 MPM 方法相比的最佳性能,提出了一种大变形非均质边坡破坏的模拟方法,作为该方法在模拟实际工程问题中的应用之一。

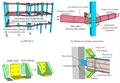
图:(左)不连续表面的定义和(右)通过材料点和标记点在XMPM中的离散化

图:基于定位起始和传播算法的 XMPM 仿真流程图。

图:剪切带在t=0.3、0.5、0.6、0.8 s时在三维、侧视图和俯视图中的传播。剪切带的表面由模拟中的一组标记点表示,并进一步后处理为Delauney三角曲面以进行可视化。彩色等高线绘制高程。

图:三维滑坡模拟的最终配置:(a)XMPM和(b)常规MPM模拟的总位移场等值线图;(c) 三个土层的等高线图;以及(d)截面A–A'处最终表面形貌的比较。
文三:

基于材料点法的磁性软机器人仿真框架
摘要:
仿真是机器人系统发展的一个关键方面。模拟真实世界机器人行为的能力提供了一个可以开发机器人设计和优化控制系统的环境。由于使用外部磁场进行驱动,磁性软机器人可以无线控制,并且易于小型化。然而,由于材料弹性和磁性扳手(力和力矩)之间的关系,磁性软材料和外部磁场源之间的关系在建模中显得非常复杂。在这项工作中,我们使用材料点法(MPM)提出了一个磁性软机器人的仿真框架,该方法将超弹性材料模型与外部磁场下感应的磁性扳手相结合。与现有的有限元方法(FEM)相比,所提出的基于MPM的框架固有地模拟了模型区域之间的自碰撞,并且可以捕捉非均匀磁场中的力的影响。我们展示了MPM框架对磁性扳手对磁性软机器人的影响进行建模的能力,捕捉机器人在时变磁场下的动力学行为,并提供与障碍物碰撞时变形的准确表示。我们通过将仿真与文献中先前提出的一系列真实世界的磁性软机器人设计进行比较,展示了MPM框架的多功能性。

图:MPM遵循的循环方法。(a) 在粒子域中计算内力和磁应力。(b) 粒子特性将传递到栅格表示。(c) 在网格域中计算外部相互作用和由磁梯度引起的力。(d) 粒子特性是根据栅格重建的。

图:用于测量梯度力引起的 MSR 变形的实验装置。一个线性平台使机器人更接近梯度力更强的永磁体。这会导致 MSR 中的长度延长。

图:MPM 框架中表示的文献中的 MSR
文四:

基于材料点法的移动软体拓扑优化
摘要:
拓扑优化方法已被广泛应用于各个行业,因为它们有可能为机械设备提供有前景的候选设计。然而,它们的应用通常局限于不显著移动的物体,这是由于传统使用的模拟技术难以在计算上有效地处理多个结构之间或与边界之间的接触和相互作用。在本研究中,我们提出了一种用于运动物体的拓扑优化方法,该方法结合了计算机图形学领域中经常用于模拟物体运动的材料点方法。数值实验证明了该方法的有效性和实用性。

图:密度滤波示意图。在粒子切换网格过程中,将红色 区域的粒子设计变量转换为(i,j)网格(蓝色节点)。在网格运算中,将平滑网格设计变量作为网格设计变量的卷积进行计算。在网格-粒子过程中,将 k,l ∈{-1,0,1}(3 × 3个蓝色节点)的(i + k,j + l)网格上的平滑网格设计变量转化为蓝色 区域内粒子的平滑设计变量。

图:履带设计问题

图:履带优化结果
文五:

自由表面流固耦合问题的浸入式有限元材料点法
摘要:
自由表面流体-结构相互作用(FSI)问题的固有非线性在效率和保真度方面对数值方法提出了挑战。在本文中,我们提出了一种求解进水流体-结构相互作用问题的浸入式有限元材料点法。在该方法中,流体域通过使用欧拉和拉格朗日描述的改进的不可压缩材料点法(iMPM)离散,而固体域通过有限元法(FEM)求解。iMPM和FEM之间的相互作用通过尖锐的浸入式界面方法来处理。此外,加权跟踪点被设计成以低时间复杂度跟踪流体-结构界面;开发了一种粒子重排方法来消除数值空洞,这些空洞是由高度无序的粒子分布引起的非物理空洞,FSI问题的原始iMPM由此受到影响。提出了各种自由表面FSI问题,以证明所提出方法的准确性和有效性。将计算结果与文献中的分析、实验和模拟数据进行了比较,在这些数据可用的情况下,计算结果具有良好的一致性。所提出的方法有望成为解决自由表面FSI问题的有力工具。

图:计算领域Ω 由流体域组成Ωf、 固体畴Ωs、 固体-固体接触界面Γ接触,固体牵引边界Γst,固体 位移边界Γsd,自由表面Γfree和FSI界面ΓFSI。

图:浸入式有限元材料点法的空间离散化

图:流体粒子在不同时间实例下的分布及其速度。

图:垂直入水子弹形成的空腔形状: 本文算法的模拟结果(粒子表示) ;罗格维诺维奇原理(由虚线表示) ; 以及实验图像


