机器人,动力学与自动控制最新研究进展
点击上方蓝字了解更多计算与STEM领域研究前沿
文一:

几何织物:推广经典力学以捕捉行为物理学
摘要:
在几何控制的能量成形方法中,经典机械系统是控制器设计的核心。然而,它们的表现力受到仅位置度量以及度量和几何之间密切联系的限制。最近对黎曼运动策略(RMP)的研究表明,摆脱这些限制可以产生强大的设计工具,但代价是理论稳定性的保证。在这项工作中,我们将经典力学推广到我们所说的几何织物,几何织物的表现力和理论使得设计出在实践中优于RMP的系统成为可能。几何织物严格概括了经典力学,形成了一种新的行为物理学,首先将其推广到芬斯勒几何,然后明确地弯曲它们以塑造其行为,同时保持稳定性。我们发展了织物理论,并展示了一系列检查其理论特性的受控实验和一组机器人系统实验,这些实验表明,与我们目前最先进的控制器设计RMP的精心设计和强化实施相比,RMP的性能有所提高。

图:具有不同度量设计的未弯曲织物和几何织物的粒子行为。

图:左:到达被墙挡住的目标。中间:比较织物(顶部)和RMP(底部)的环到达实验。右:动态避障实验装置。
文二:

Elastica:软机器人控制的柔性力学环境
摘要:
众所周知,软体机器人很难控制。这部分是由于缺乏能够捕捉其复杂连续体力学的模型和模拟器,导致缺乏充分利用身体顺应性的控制方法。目前可用的方法要么计算要求过高,要么在物理假设上过于简单,导致开发此类控制方案的可用仿真资源不足。为了解决这个问题,我们引入了Elastica,这是一个开源的仿真环境,对可以弯曲、扭曲、剪切和拉伸的柔软细长杆的动力学进行建模。我们将Elastica与五种最先进的强化学习(RL)算法(TRPO、PPO、DDPG、TD3和SAC)相结合。我们成功地在四种场景中演示了软机械臂的分布式动态控制,其中大动作空间和小动作空间都是RL学习困难的地方,RL参与者必须学会与环境交互。培训集中在1000万次政策评估中,对学习到的政策进行近乎实时的评估。

图:a) 一集训练策略(SAC)的快照显示手臂成功跟踪随机移动的目标。b) 显示目标随机轨迹的快照叠加。c) 手臂中心线和目标在连续时间步长内的轨迹。d) 不同算法的学习结果。算法用5个不同的随机种子训练了1000万个时间步。曲线是组合结果的滚动250个样本的平均值。阴影区域是样本的标准偏差。

图:a) 一集训练策略(SAC)的快照,显示手臂成功到达目标,然后调整方向以匹配目标方向。b) 快照的叠加。c) 不同算法的学习结果。算法用5个不同的随机种子训练了1000万个时间步。曲线是组合结果的滚动250个样本的平均值。阴影区域是样本的标准偏差。

图:a) 来自训练有素的策略(TRPO)的快照,显示手臂利用障碍物穿过开口并到达目标。b) 在有和没有障碍物的情况下,应用驱动的行为比较。c) 有障碍物和没有障碍物的手臂中心线的延时显示,与障碍物的相互作用是成功通过开口的关键。d) 用5个随机种子训练50万次步的算法的学习曲线。曲线是组合结果的滚动50个样本的平均值。阴影区域是样本的标准偏差。

图:a) 训练策略(TRPO)的快照显示手臂成功地穿过障碍物巢到达目标。b) 手臂在障碍物中移动的延时。c) 用5个随机种子训练100万个时间步的算法的学习曲线。曲线是组合结果的滚动50个样本的平均值。阴影区域是样本的标准偏差。
文三:

连续体和柔性机器人动力学:基于应变参数化的方法
摘要:
本文针对Cosserat梁在连续体和软机器人操纵和运动中的应用,提出了一种新的Cosserat梁动力学模型。与通常的方法不同,它基于梁形的应变场的非线性参数化及其在应变模式的函数基础上的缩减。在保持几何精确性的同时,该方法为我们提供了一组通常拉格朗日矩阵形式的最小常微分方程,可用于分析和控制设计。受刚性机器人的启发,该拉格朗日模型的矩阵计算采用了一种新的简化逆牛顿-欧拉算法。为了评估该方法,通过几个非线性结构静力学和动力学阶段,将该拉格朗日模型与经过充分验证的有限元方法进行了比较。

图:梁承受集中的尖端扭矩(左)和随动力(右)。平衡配置(顶部)和尖端位置与扭矩和力大小(底部)的关系。

图:梁内部由一根电缆驱动。通过增加不同路线的张力T而获得的配置。(a) 趋同。(b) 克罗斯。(c) 螺旋。(d) 平行截断为五种模式(虚线)和十种模式(实线)。

图:用水平尖端力F=50 N弯曲后释放夹紧梁:在10 s的模拟中,每0.5 s拍摄一次快照,有两种弯曲模式(绿色)、三种弯曲模式。

图:夹紧梁弯曲和释放:三种弯曲模式(黑色)和一种拉伸和三种弯曲模型(红色)的水平(实心)和垂直(虚线)尖端位移的时间演变。黑色和红色的图难以区分。
文四:

变曲率软连续体机器人的运动学建模与控制
摘要:
柔性结构和外力的影响通常会导致柔性连续体机器人的复杂变形,这使得机器人的精确建模和控制具有挑战性。本文提出了一种新的考虑外力的软连续体机器人变曲率运动学建模方法,实现了机器人的精确运动仿真和前馈控制。为此,首先基于绝对节点坐标公式对可变曲率配置进行参数化。然后,开发了一个动力学模型来描述所定义的配置空间和带有有效载荷的驱动空间之间的映射。通过该模型,我们实现了1ms内不同有效载荷和输入压力的软连续体机器人的准确快速运动仿真,并通过一组实验进行了验证。最后,为两段式柔性连续体机器人开发了一种基于逆模型的前馈控制器。跟踪复杂轨迹的实验结果验证了我们的模型和控制策略的有效性。末端执行器的平均位置误差为机器人长度的2.89%。本文还可以作为设计和分析具有所需工作空间的软连续体机器人的工具。

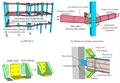
图:气动软连续体机器人示意图。(a) 软连续体机器人的初始状态。(b) 软连续体机器人通过选择性地给致动器室充气来驱动。(c) 两段式气动软连续体机器人图片。

图:软连续体机器人配置说明的示意图。(a) 机器人横截面示意图。软连续体机器人的一个部分由两个纤维增强致动器和它们之间的不可伸展层组成。(b) 柔性连续体机器人的变曲率配置由n-1个单元描述。

图:软连续体机器人一部分的设计和制造示意图。第一步:硅橡胶管是通过模塑工艺制成的。第二步:然后将纤维沿着橡胶管缠绕。步骤3:进行第二步成型,封装致动器并形成平面。步骤4:组装两个单室执行器,它们之间有一个可扩展层。步骤5:最后,一个连续体机器人部分由两个端板密封,其中一个端板为空气流动预留了两个端口。还显示了制造的机器人截面的横截面图。

图:两段式柔性连续体机器人的轨迹跟踪结果。无有效载荷:(a)两个部分的输入气压;(b) 期望轨迹与视觉系统捕获的实际轨迹之间的比较;以及(c)与机器人在每个给定离散点上的长度相比的位置误差。有效载荷为30克:(d)两个部分的输入气压;(e) 期望轨迹与视觉系统捕获的实际轨迹之间的比较;以及(f)与机器人在每个给定离散点上的长度相比的位置误差。
文五:

软机器人和材料的运动和形状控制
摘要:
提出了一种基于连续体的方法,用于同时控制软机器人和材料(SRM)的运动和形状。这种方法允许系统地计算任意所需SRM运动和几何形状的驱动力。为了控制运动和形状,使用绝对节点坐标公式(ANCF)的位置和位置梯度来制定流变指定的轨迹和形状约束方程,在逆动力学过程中用于定义致动控制力。与需要与关节坐标数相等的多个独立致动力的刚体系统的控制不同,SRM运动/形状控制导致广义控制力,为了正确定义致动力,需要对广义控制力进行不同的解释。虽然这些运动/形状控制力的定义是使用SRM控制中常用的气压驱动来证明的,但所提出的程序可以应用于其他SRM驱动类型。概述了在空间相关和恒压两种情况下确定驱动压力的方法。使用Nanson公式解释了表面几何形状变化对驱动压力的影响。所获得的数值结果表明,使用新的致动力定义可以同时控制运动和形状。

图:运动/形状控制。

图:直线、参考和当前配置。

图:气动室横截面。

图:最初为锥形悬臂梁,形状为弯曲的恒定横截面梁。

如果你觉得此文对你有帮助,请点赞,谢谢!
计算机技术在科学&技术&工程&数学中得到了广泛的应用,力学方面,计算机技术成为了科学的第四次革命性技术,现在基于计算机的数据科学已经逐步成为力学等其他科学发现的第四范式。人工智能、大数据、数字孪生等概念已经逐步成为当今时代的主题。智能制造、智能算法、数据驱动力学、大语言模型、自动驾驶在当今社会展现出巨大潜力,吸引了大量的研究人员。同时高性能显卡和多核中央处理器的出现为大规模数值模型的高性能计算提供了强大算力。公 众号为力学相关行业的爱好者、教育人士和从业者提供一个平台,希望能通过自己对前沿研究、技术培训和知识、经验的整理、分享带给相关读者一些启发和帮助。
STEM与计算机方法
扫一扫二维码关注本公 众号



