案例仿真:永磁无刷直流电机控制外电路参数详细说明


导读:本文节选仿真秀专栏作者-劲风电机设计工作室在仿真秀专栏原创的技术文章。后投稿在仿真APP公众号发布,仿真秀将支付作者满意稿酬,并提供署名权。并优先对接本文相关技术的企业合作。如果您也感兴趣请在本公众号后台留言联系我们。以下是正文:
永磁无刷电机本体由定子、转子和位置传感器三部分等组成,位置传感按转子位置的变化,沿着一定次序导通或者关断功率管三极管从而实现对定子绕组的电流的换流(即检测转子磁极相对定子绕组的位置,并在确定的位置处产生位置传感信号,经信号转换电路处理后去控制功率开关管,按一定的逻辑关系进行绕组电流切换),永磁无刷电机工作原理是两相导通三相六状态,且由方波驱动,在一个电周期范围内导通电角度为240°,对于永磁无刷电机外电路的设置,需要确定四个参数:转子初始位置角度θ、脉宽周期pw、功率管导通时刻Td,控制功率管导通顺序。这几个参数直接影响仿真结果的准确性,在本文中列举两个例子进行说明。
一、外电路主要参数的确定方法
1、转子初始位置角的确定
永磁无刷电机转子初始位置角的确定有三种确定方法,首先,在Rmxprt经典路算软件中设置好电磁参数和绕组参数后,对其进行Maxwell2D导出,在Model—Motor_Setup—Data中可以查到,软件会自动对其进行计算并生成;第二通过确定A相绕组磁场轴线和转子N极之间的角度,从而可以确定转子初始位置;第三通过仿真可以得到A相反电势反电势过零点,即可得到转子初始位置。由于第一种情况过于简单,本文只介绍第二种和第三种确定方法。
以12槽4极永磁无刷电机为例,电机模型如图1所示,其中绕组部分红色表示A相、绿色表示B相、黄色表示C相,转子部分面向气隙处褐色表示N极、蓝色表示S极。
首先介绍第一种方法,该电机极槽配合为12槽4极,通过计算节距为3,故A相磁场轴线在第3齿齿中心线,而离第3齿最近的N极极中心线,通过计算两者的夹角为15°,故转子初始位置角度为15°。

图1 电机模型
然后介绍第二种方法,当电机模型确定好之后,将转子初始位置角度先设置为0°,三相绕组无任何激励,给定转子一个转速,这里给定1000rpm,对其进行仿真求解,将横坐标设置为转子位置,得到相反电势如图2所示,找到A相反电势为零的位置,横坐标为15°,该位置就是转子初始位置角,故转子初始位置角度为15°。

图2 相反电势
2、脉宽周期的确定
在永磁电机中,一个电角度为360°,即为1个N极+1个S极,机械角度和电角度的关系为:αm=360°/P,P为极对数,4极电机的电角度为720°,因此每个电周期转子转过的机械角度为αp=360/2=180°,对应于外电路中的period,如图3所示。

图3 外电路中period电周期角度
3、脉冲宽度的确定
永磁无刷电机的脉冲周期在一个360°的电周期范围内是240°导通,即前180°导通120°,后180°导通120°,然而在外电路中是以机械角度所表示,单相导通的机械角度为脉冲周期αm为120°/360°*αp=120°/360°*180°=60°,机械角就对应外电路中的脉冲宽度Pw,如图4所示。

图4 外电路中Pw脉宽周期
4、功率管导通时刻的确定
永磁无刷电机中绕组最常用的接法为Y型连接且采用全桥式电路,其控制原理是三相六状态控制,电路如图5所示。

图5 三相全桥式控制电路
永磁无刷电机的六个状态为B-A+→A+C-→C-B+→B+A-→A-C+→C+B-,依次循环,对应于功率管为T6T1→T1T2→T2T3→T3T4→T4T5→T5T6依次导通,每个状态之间的换相延迟时间为Td=αp/6。
设初相角为α0,各换相点对应的换相角为外电路中的延时时间(Time Delay),依次成等差数列,即:αn=α0+(n+1)×Td (n=1、2、3、4、5、6)。在外电路设置中,初相角为A相反电势的初相角αn= Td/2,按照本文中12槽4极电机而言,初相角为15°,依次确定六个功率管换向时刻的电角度为15°、45°、75°、105°、135°、165°,六个功率管的角度如图6所示。


图6 六个功率管的换相时刻
三、案例仿真说明
本节使用一款12槽4极永磁无刷直流电机为例进行仿真,得出该电机电磁主要性能结果。
该电机为母线电压为78V,额定转速为15000rpm,额定转矩为0.12Nm,给定电机负载为0.12Nm,检测电机带载启动直到稳定过程,电机空载磁密云图如图7所示,仿真结果如图8~图14所示。

图7 空载磁密云图

图8 转矩和转速变化





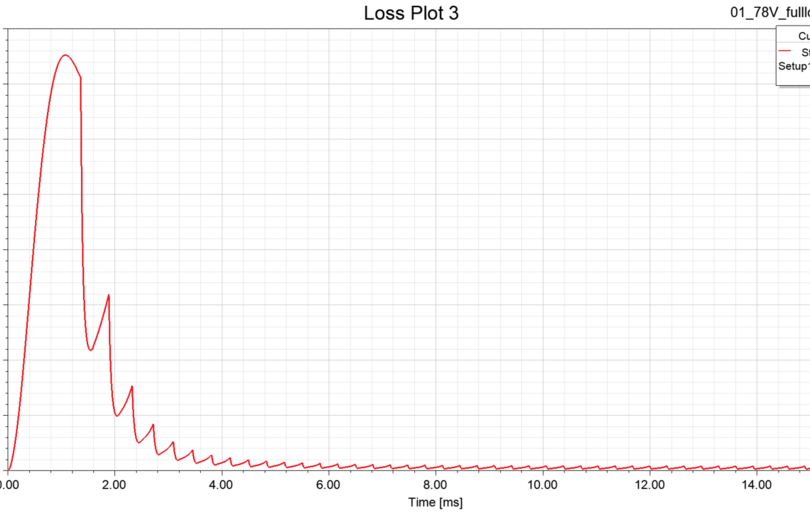
图14 绕组铜耗


