案例分享 | 用 VIRES VTD 实现智能网联汽车应用的多分辨率交通仿真

过去几年里,车载自组织网络(VANET)因其具有提升交通安全、效率以及驾驶员舒适性的潜力,引起了众多研究人员的关注。实际上,一些高级驾驶员辅助系统( ADAS)应用(例如协同驾驶技术以及后来的自动驾驶技术)只能通过道路上车辆之间的无线通信来实现。

图 1:ADAS 仿真
在汽车行业里,传统的驾驶员辅助与主动安全系统的开发过程中采用仿真(图 1)已获得普遍认可,这些仿真主要侧重于细节程度极高的单个车辆的仿真。在对基于车载通信的 ADAS 性能进行研究、评估时,这种在仿真环境中依赖于单个车辆或者少量车辆的孤立视角的做法则难以奏效。每一个配备了无线通信技术的车辆都有可能接入一个由参与车载网络的其他道路使用者组成的反馈回路,因此需要考虑的影响者的数量就会大增。
基于以上考虑因素,需要根据可用的计算资源在各个车辆仿真细节的准确度与所仿真的车辆数量的多少之间进行权衡。
本文给出了有助于这种权衡的解决方案:通过耦合多种分辨率的交通仿真,不仅能获得进行权衡时所需的准确性较高的仿真结果,而且能实现对周边环境大尺度场景的高效仿真。
开发多分辨率交通仿真
1 微观交通仿真器:SUMO
我们选用城市流动性仿真(SUMO)作为交通仿真器,负责低分辨率区域(LRA)的仿真。SUMO 是一个空间连续、时间离散的微观仿真器。虽然它广泛应用于各种研究领域,但最引人注目的是它大量出现在与 VANET 仿真有关的研究论文中。SUMO 以其运行速度高、可扩展性好而著称。SUMO 非常适合于仿真位于低分辨率区域的大量车辆。得益于其简化的驾驶员模型(由该模型确定车辆将采用的路径),大幅度提升了低分辨率区域的交通仿真效率。
2 亚微观交通与车辆仿真器:Virtual Test Drive
我们采用VIRES公司提供的复杂道路交通环境仿真工具VTD来实现亚微观交通与车辆仿真,从而满足位于高分辨率区域的交通车辆的仿真的需求。
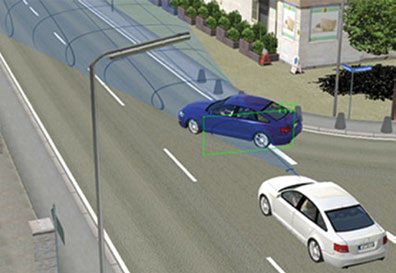
图 2:VIRES VTD 中仿真的雷达传感器的 3D 可视化示意图
VTD 是为汽车行业而开发的,用于开发 ADAS 和自动驾驶车辆的虚拟试验环境。它主要以驾驶员行为、车辆动力学及传感器的高精度和交互式仿真为基础。VTD是高度模块化仿真工具,任何标准组件均可由满足特定需求的自定义插件来替换。其标准驾驶员模型以智能驾驶员模型为基础。同时,VTD开放了驾驶员模型接口,必要时可采用外部自行开发的驾驶员模型。同样的概念也适用于车辆动力学仿真,其中标准单轨模型可由适合具体车辆的任意复杂车辆���力学模型来替换。每个被仿真的车辆可配备任意的仿真传感器,如图 2 中所示的雷达传感器。
3 通过脱机预处理实现耦合
这两个仿真工具依靠不同的数据格式来描述模型化的路网。为了能让这两个仿真器进行联合仿真,底层数据基础必须互相匹配。VTD 采用 OpenDRIVE 格式来描述道路路网。通过采用分析式定义,这种描述能使道路几何建模尽量贴近现实。另一方面,SUMO 通过线段来实现对公路网的几何近似。此外在交叉路口和车道的几何建模上也存在差异。为实现数据基础的匹配,我们在脱机预处理步骤中将公路网从 OpenDRIVE 转换为 SUMO 支持的文件格式。
4 联机耦合与同步

图 3:仿真分辨率切换比较
在仿真运行期间仿真器的耦合基于主从原则。图 3 给出了单个仿真步长期间的运行次序,其中 VTD 和 SUMO 能以不同的时间分辨率运行,并且不会对同步造成影响。 为高分辨率区域(HRA)的时间步长, 而
为高分辨率区域(HRA)的时间步长, 而 为低分辨率区域(LRA)的时间步长。亚微观仿真运行的频次通常要比微观仿真的更高。
为低分辨率区域(LRA)的时间步长。亚微观仿真运行的频次通常要比微观仿真的更高。 和
和 分别表示各仿真器的局部仿真时间。每个仿真步长开始时,在 VTD 中以新的时间步长进行仿真。
分别表示各仿真器的局部仿真时间。每个仿真步长开始时,在 VTD 中以新的时间步长进行仿真。
如果达到 SUMO 的下一个时间步长,并且满足条件≥+,则将高分辨率车辆的状态通过网关发送给 SUMO。这会触发低分辨率模型中的下一个时间步长的仿真,完成后反馈低分辨率车辆的位置。此时将这些车辆进行分类,必要时可变更各个车辆的分辨率。在仿真器之间进行车辆互换时,如果车辆由于仿真精度上的差异而不能根据其在特定车道中的位置完成映射,前面提到的底层公路网中存在的内在差异就有可能引发各种问题。对于建模方式截然不同的复杂交叉路口更是如此。
在成功完成所有的分辨率变更后,仿真再次被解锁,可开始仿真下一个时间步长。这种同步非常重要,它确保了在多次仿真中都能得到可重现的仿真结果。
仿真区域的动态空间划分
我们这种方法的目标是:在感兴趣的动态区域耦合不同分辨率的交通仿真模型。与传统的交通仿真不同,对于这些用于在虚拟环境中进行试驾的车辆,我们不打算从鸟瞰的角度研究大量车辆,而是将重点放在单个车辆(或者数量有限的车辆)上。在这些感兴趣的车辆中,我们所研究的配有车载 ADAS 系统的车辆被称为 EGO 汽车。仿真的测量值和传感器值输入到 ADAS 中,根据车辆的类型及其使用场景,相应的 ADAS 会直接或间接地影响车辆的状态和行为。根据距离标准,以 EGO 汽车为中心定义一个感兴趣的区域,其中的仿真必须满足所定义的高分辨率要求。由于 EGO 汽车会连续行驶穿过虚拟环境,这个感兴趣的区域有可能随之移动。为此我们将整个仿真区域动态地划分为高分辨率区域(HRA)和低分辨率区域(LRA)。

图 4:仿真区域的动态划分
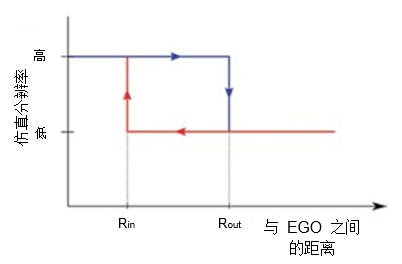
图 5:仿真分辨率的滞后控制
图4 给出了动态空间划分的示意图。其中,以 EGO 车辆为中心的圆形定义为高分辨率区域。红色车辆处于圆内,因此仿真时采用高分辨率的亚微观仿真器;而绿色车辆处于圆外,因此仿真时采用低分辨率的微观仿真器。微观仿真中的所有车辆(而亚微观仿真只包含高分辨率车辆)及其运动适用于其在微观仿真器中的替代物。由于道路交通的动态性质,允许 EGO 汽车、高分辨率车辆以及低分辨率车辆连续移动。因此,在完成每一个时间步长的仿真后进行指定分辨率模式的分类。经过分类将分辨率变更的车辆转给相应的仿真器。在每一个时间步长里,分辨率的变更可以是双向的。但由于高分辨率区域是以 EGO 汽车为中心定义的,因此该车总是采用高分辨率仿真。为避免高分辨率与低分辨率边界附近的车辆在这两种分辨率区域之间过于频繁地切换,在分类过程中采用了如图 5 所示的滞后控制器。如图 3 所示,定义了两个阈值 Rin 和 Rout。只有当车辆与 EGO 汽车的距离小于 Rin 的值时才转为高分辨率仿真。只有当距离超过阈值 Rout 时才会切换回低分辨率仿真。
VTD 做到了高度模块化,任何标准组件均可由自定义的、有可能更具体的实现来替换。
仿真与评估
1 场景与仿真设置
建立了一个模拟场景用于试验耦合概念并评估其性能。它包含一段长度为 50 km、自西向东行驶的单一直线道路,以及两条单向车道。各车道的配置是:车道上每小时进入的车辆始终为 1,000 辆,向西或向东行驶。EGO 汽车位于道路的起点附近。该车跟随着交通流自西向东行驶,正对着迎面而来的交通流。
这条虚构的道路首先按 OpenDRIVE 格式建模,然后转换为 SUMO 公路网格式。我们进行了两轮试验。在第一轮中,整个仿真区域采用亚微观流量仿真器;在第二轮中,我们用所述的多分辨率概念来划分 VTD 与 SUMO 之间的仿真区域。我们选择的时间步长是:VTD 中高分辨率区域的 为 20 ms,SUMO 中低分辨率区域的 为 1 s。设置用于定义感兴趣的动态区域的滞后阈值: 为 500 m、 为 550 m。
2 性能评估
针对一段仿真时间为 1,800 s 的仿真,我们测量了执行每一个仿真步长所花费的时长,其间车辆数量一直在增加。每轮分别进行五次仿真,以便消除测得的执行时间的波动。为更清晰地展示测量值的变化趋势,在后面的图示中还给出了移动平均值。
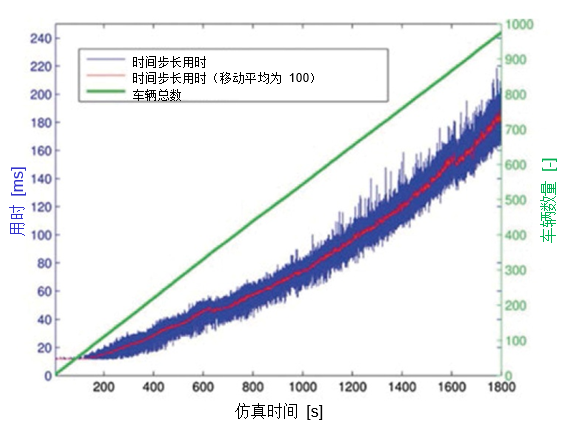
图 6:仿真性能——全亚微观仿真
图 6 给出了在仿真期间随着仿真车辆数量的增加亚微观仿真的性能变化过程。每一个仿真步长的用时几乎不变,直到车辆数量增至 70 辆。
此时的用时为 12 ms 左右,未超过 20 ms 的时间步长,因此仍能满足实时约束。车辆增至 150 辆左右时,用时超过了 20 ms,无法再做到实时仿真。随着车辆数量的增加,每一个时间步长的用时也有相当大的增幅,并且在仿真过程结束时达到 180 ms。与仿真开始时相比,计算时间增加了 15 倍。完成整个仿真历时 120 分钟,是所仿真时间的四倍。
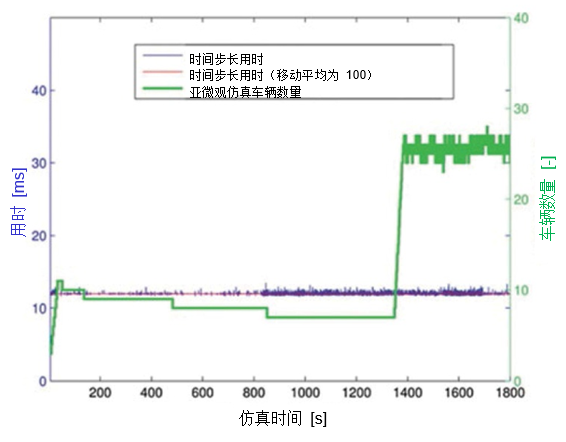
图 7:仿真性能:多分辨率仿真
在同一个仿真场景中、针对同一段仿真时间,多分辨率仿真在仿真期间的性能变化如图 7 所示。其中,车辆总数的增加方式与全亚微观仿真相同,单独绘制的亚微观仿真车辆数量给出了处于高分辨率区域的车辆数量。
从图中可以看出,缩小感兴趣的亚微观模型区域可以满足缩短仿真总时间的目标。在亚微观仿真车辆局部数量达到最大值 11 辆之后,车辆数量缓慢减少,这是因为移动较慢的车辆落在移动较快的 EGO 汽车后面所致。在仿真时间 1,350 s 前后,来自道路各端的两个交通流在道路中部汇合,随后亚微观仿真车辆数量增加。然而,由于高分辨率区域的范围有限,亚微观仿真车辆数量不会超过某个限值。对于以上给定的配置,该车辆数量在 27 辆左右。时间步长的用时保持在稳定的平均 12 ms 左右,因此耦合这两个仿真器所造成的资源消耗可忽略不计。同时还给出了微观仿真器的运行时间。由于其仿真模型细节较少且效率更高,因而其用时也可以忽略。整个仿真历时不到 18 分钟,因此多分辨率仿真要比实际时间快 1.66 倍,并且在整个仿真期间都能满足实时约束。
在虚拟环境中运用这种分而治之的策略,能够对基于车载网络的驾驶员辅助系统的具体实现进行准确、逼真、大尺度的试验与验证。
结束语
在本文中,我们提出了耦合不同仿真分辨率的交通仿真器的概念,藉此实现以动态确定的感兴趣区域为关注点的多分辨率交通仿真。 所述方法对仿真区域进行了可变划分,感兴趣、较精细的区域用 VIRES 虚拟试驾(VTD)亚微观模型表示,周围区域则用低分辨率的微观模型表示。评估表明,与仿真规模相同的全亚微观仿真相比,可大幅缩短计算时间,甚至能做到实时仿真。在虚拟环境中运用这种分而治之的策略,能够对基于车载网络的驾驶员辅助系统的具体实现进行准确、逼真、大尺度的试验与验证。作为下一步,我们正在研究将多分辨率仿真法应用到与车载网络仿真有关的其他领域,也就是网络仿真与应用模拟,从而更高效、更逼真地对包含所有领域的整个系统建模。



