仿真测试入门参考(11):自动驾驶的测试方法:三支柱

“ 经常有朋友问如何学习仿真测试,于是想着把自己的一些经验和理解分享出来,希望能有所帮助。不过视野和技术有限,所说不一定对,供大家批评和参考。这是第11篇,自动驾驶的测试方法:三支柱”
随着自动驾驶的发展和应用,人们逐渐发现自动驾驶技术目前并不成熟,因自动驾驶系统安全性不足导致的交通事故时有发生,危害人们的人身和财产安全,例如:2018年3月18日在美国亚利桑那州,一名在人行横道的行人被Uber自动驾驶汽车撞伤,之后不幸身亡;2022年6月美国国家公路交通安全管理局(NHTSA)发布的2份报告显示,2021年7月至2022年5月,全国共报告了522起自动驾驶相关的交通事故。
为保障自动驾驶汽车在实际应用的安全性,对其进行科学而充分的测试显得愈发重要。国际汽车制造商协会(OICA)提出采用由审核/评估(包含模拟仿真测试)、封闭场地测试和实际道路测试的“三支柱”方法对自动驾驶汽车进行测试认证;联合国自动驾驶验证方法非正式工作组(VMAD IWG)提出包含场景目录以及模拟仿真测试、封闭场地测试、实际道路测试、审核评估和在用检测报告等手段的测试方法。
综合利用各种测试手段的特点,采用包含模拟仿真测试、封闭场地测试和实际道路测试等手段在内的“多支柱”方法对自动驾驶系统进行测试,已经逐渐成为行业共识。
全国汽车标准化技术委员会也在牵头行业内相关企业和组织制定相关标准,其中《智能网联汽车 自动驾驶功能场地试验方法及要求》已于2022年10月12日发布,并于2023年5月1日起实施;《智能网联汽车 自动驾驶功能道路试验方法及要求》已于2021年12月24日公开征求意见;仿真测试相关标准也在制定过程中。
下面对这三种测试手段的特点进行介绍。
01.模拟仿真测试
模拟仿真测试是指在虚拟仿真环境中模拟各类道路、交通情况以及部分车辆组件或者自动驾驶模块,对自动驾驶系统进行测试的方法。
在虚拟仿真环境中构建可以便捷的构建丰富多变的测试场景,并快速进行重复性测试,从而一方面可以对不同设计运行域、不同功能、不同参数范围的大量场景进行快速而低成本的测试;另一方面,对于真实环境中难以复现或者复现危险性较大的场景进行重复测试。
不过由于对部分车辆系统或者测试环境进行了简化建模,仿真测试中的交通场景或者车辆模型不能做到与真实情况完全一致。这就需要从仿真场景、车辆模型保真度、数据接口正确性和自动驾驶系统表现一致性等方面对仿真测试进行可信度评估。
模拟仿真测试的优点和缺点如下表所示。

02.封闭场地测试
封闭场地测试是指是在封闭试验场地道路上利用真实或模拟的交通参与者构建各类可控、可重复的测试场景,对搭载自动驾驶系统的车辆进行测试的方法。
精心设计和构建的测试场地和交通参与者,使得场地测试具有较高的保真度;同时由于各项测试要素都可以严格控制,场地测试可以对各项场景进行重复测试,并收集需要的数据。
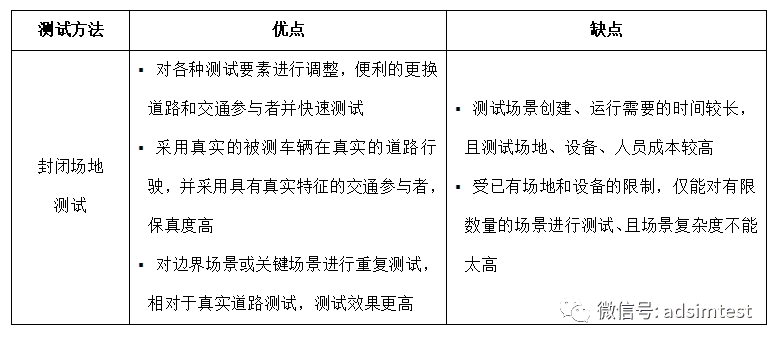
不过由于封闭场地中的道路和交通参与者的种类和行为有限,且建设、运行成本高,一般在封闭场地中仅进行有限数量的、关键场景的测试。
封闭场地测试的优点和缺点如下表所示。
03.实际道路测试
实际道路测试是指搭载有自动驾驶系统的车辆在实际的开放道路上行驶,通过真实的道路、交通、天气等环境对其进行测试的方法。
真实道路测试是对自动驾驶系统最终的验证手段,通过在复杂多变的真实交通流中长时间、不间断的行驶,可在设计运行域内对各项自动驾驶功能的运行情况进行测试和验证。另外,还可在道路测试中对自动驾驶车辆的乘坐舒适性、与其他交通参与者的交互情况以及自动驾驶系统不同状态间的切换情况(如就绪、激活、接管、最小风险策略)进行测试。
实际道路测试的优点和缺点如下表所示。



