Carla中如何进行传感器建模并用pygame界面显示传感器数据


Pygame 在 SDL(Simple DirectMedia Layer,使用 C语言编写的多媒体开发库) 的基础上开发而成,它提供了诸多操作模块,比如图像模块(image)、声音模块(mixer)、输入/输出(鼠标、键盘、显示屏)模块等。相比于开发 3D 游戏而言,Pygame 更擅长开发 2D 游戏,比如于飞机大战、贪吃蛇、扫雷等游戏。
pip install pygame 。import pygameimport syspygame.init()size = width, height = 800, 600screen = pygame.display.set_mode(size)pygame.display.set_caption("我的小游戏程序")while True:for event in pygame.event.get():if event.type == pygame.QUIT:sys.exit()pygame.display.update()

import pygameimport syspygame.init()size = width, height = 800, 600screen = pygame.display.set_mode(size)pygame.display.set_caption("我的小游戏程序")face = pygame.Surface((50, 50), flags=pygame.HWSURFACE)face.fill(color='white')while True:for event in pygame.event.get():if event.type == pygame.QUIT:sys.exit()screen.blit(face, (100, 100))pygame.display.update()pygame.quit()

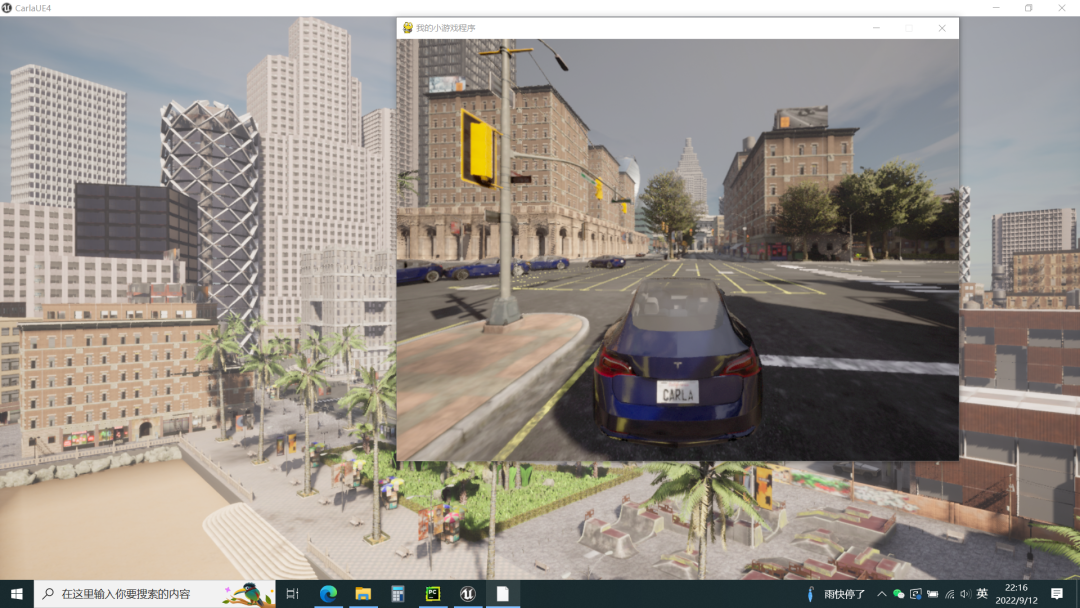
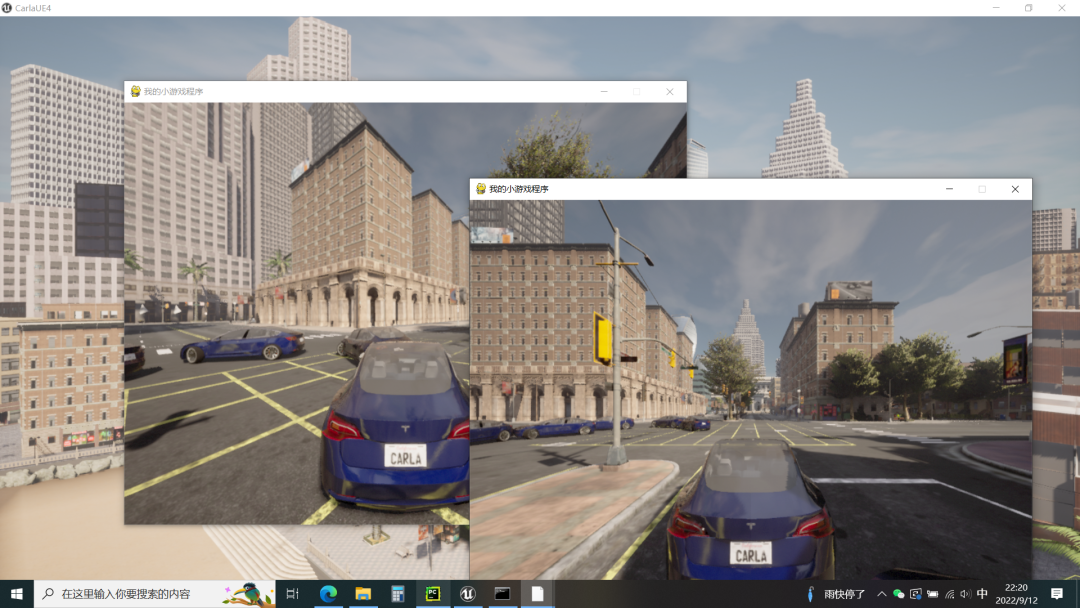
# -*- coding:utf-8 -*-import pygameimport sysimport carlaimport numpy as npdef sensor_image(image):array = np.frombuffer(image.raw_data, dtype=np.dtype("uint8"))array = np.reshape(array, (image.height, image.width, 4))array = array[:, :, :3]array = array[:, :, ::-1]surface = pygame.surfarray.make_surface(array.swapaxes(0, 1))my_display.blit(surface, (0, 0))return surfacetry:# ######################################################## === 1, 创建pygame窗口 ===pygame.init() # 内部各功能模块进行初始化创建及变量设置,默认调用size = width, height = 800, 600 # 设置游戏窗口大小,分别是宽度和高度screen = pygame.display.set_mode(size) # 初始化显示窗口pygame.display.set_caption("我的小游戏程序") # 设置显示窗口的标题内容my_display = pygame.display.set_mode(size, pygame.HWSURFACE | pygame.DOUBLEBUF)# pygame_clock = pygame.time.Clock()# ######################################################## === 2, 在车辆上创建摄像头获得图像 ===actor_list = []# 创建一个客户端,连接到服务器端口client = carla.Client('localhost', 2000)client.set_timeout(5.0)# 获取当前的仿真世界world = client.get_world()# 获取当前世界中的蓝图库blueprint_library = world.get_blueprint_library()# 从蓝图库中筛选出来model3这个车车bp = blueprint_library.filter('model3')[0]print("the vehicle blueprint:", bp)# 从地图中随机选择一个生成点spawn_point = world.get_map().get_spawn_points()[0]# 利用车辆蓝图和地图生成点,创建车辆vehicle = world.spawn_actor(bp, spawn_point)# 设置车辆为自动驾驶模式vehicle.set_autopilot(True)# 将车辆加入参与者列表,方便后期统一删除actor_list.append(vehicle)# ######################################################## 从蓝图库中筛选出来rgb摄像头蓝图blueprint = blueprint_library.find('sensor.camera.rgb')# 设置设摄像头蓝图的镜头参数blueprint.set_attribute('image_size_x', str(width))blueprint.set_attribute('image_size_y', str(height))blueprint.set_attribute('fov', '110')# 创建一个坐标位置spawn_point = carla.Transform(carla.Location(x=-4, z=2))# 创建一个摄像头传感器,并将摄像头安装到车辆上的指定位置处sensor_camera = world.spawn_actor(blueprint, spawn_point, attach_to=vehicle)# 将摄像头加入参与者列表,方便后期统一删除actor_list.append(sensor_camera)# ######################################################## 处理传感器数据:将listen到的数据(即image数据)传入lambda表达式进行处理# sensor_camera.listen(lambda image: image.save_to_disk('output/%06d.png' % image.frame))sensor_camera.listen(lambda img: sensor_image(img))while True: # 无限循环,确保窗口一直显示for event in pygame.event.get(): # 遍历所有用户操作事件if event.type == pygame.QUIT: # 获得事件类型,判断是否为关闭窗口sys.exit() # 用于结束程序的运行并退出pygame.display.update() # 对显示窗口进行更新,默认窗口全部重绘finally:pygame.quit() # 退出pygamefor actor in actor_list:actor.destroy()print("销毁:", actor)
登录后免费查看全文
著作权归作者所有,欢迎分享,未经许可,不得转载
首次发布时间:2023-06-22
最近编辑:1年前

硕士
自动驾驶仿真工程师一枚

相关推荐
最新文章
