AVL 狗离合器换挡的挑战和解决方案

· 摘要

狗牙离合器系统开发中的一个主要挑战是选择合适的狗牙离合器几何形状以及设计合适的制动系统。在本文中,提出了一种基于仿真技术来开发这种狗牙离合器系统的方法。考虑到各种差动速度和扭矩条件,多体模拟用于定义合适的狗牙离合器几何形状。对于不同的几何形状,优化了移位时间。基于模拟动态力,应用结构分析以确保部件具有足够的扭矩能力并避免断裂或疲劳效应。基于模型的方法能够在开发的早期阶段预先校准控制系统和优化控制策略。最后,在测试床上对狗牙离合器设计的组件和传输水平进行评估和验证。
介绍
对于电驱动单元中的多速变速器,与摩擦离合器或同步器单元相比,狗牙离合器是一种有趣的替代品。一方面,狗牙离合器系统具有更高的机械效率且价格更低。另一方面,它潜在的缺点是:如所需的同步,在没有扭矩中断的情况下移位或在低速下提供高扭矩,在这些单元中的相关性较小。狗牙离合器系统开发中的一个主要挑战是选择合适的狗牙离合器几何形状,设计合适的制动系统和优化控制策略。
在本文中,提出了一种基于仿真的方法来优化狗牙离合器几何形状。通过确保离合器可以在高差速下关闭而不会磨损和断裂或在高扭矩下打开,可以减少换挡时间。
狗离合器设计优化
虚拟狗牙离合器开发的第一步是仿真中的设计优化。需要实现高速差速关闭或扭矩下打开的快速狗牙离合器,以及避免意外打开。
2.1
模拟方法
设计模拟方法是多体模拟和有限元分析的组合方法。多体模拟侧重于狗牙离合器的动力学,重点是定时,动态力和扭矩。这里考虑狗牙离合器的几何形状,特别是牙齿几何形状,包括材料特性,角度或诸如钱伯斯的细节。为了在不同的离合器部件上具有当然摩擦的现实行为,需要考虑致动系统的物理或传动系中的旋转惯性。由动态模拟计算的力可用于下一步作为有限元分析的边界条件。在这里,可以评估转移事件期间不同参与情景的压力和接触压力。目标是避免断裂或疲劳效应。
2.2
多体模拟
为了通过模拟演示狗牙离合器几何优化,选择由这种离合器驱动的停车制动器
2.2.1狗离合器作为制动器
在驻车制动中,由于安全原因很重要,那就是狗牙离合器常闭。关闭力由弹簧提供,并假定有一个液压驱动系统,该系统通过加压活塞室来打开离合器。常闭意味着,如果没有施加压力,离合器处于关闭状态传动系统的位置和旋转是避免的。由于离合器是轴向狗牙离合器。假设,即狗牙的方向与离合器活塞的运动方向平行(见图1)。一个具有挑战性的用例是紧急制动。在这里,车辆制动是通过驻车制动来完成的。刹车失灵了。在相对较高的差速和高扭矩水平,对应的最大制动力的车辆是存在的。此用例已被采用作为动态仿真的例子。

图1:狗离合器的例子
2.2.2动态模拟结果
作为模拟示例,具有12个齿宽10°的径向狗牙离合器以约500转/分的差速关闭,这对应于中等的车辆速度。

图2:离合器闭合的模拟
图2显示模拟离合器位置作为时间的函数。这里的位置分别表示离合器部件与齿尖之间的轴向距离。对于正值,离合器是打开的,零相当于牙齿与牙齿的接触,负值对应于离合器的接触距离。该位置允许在+1,完全打开和-3,完全关闭之间变化。在低于0.1秒的时间内,系统加压,离合器处于初始位置,标记为橙色。0.1秒后离合器关闭开始。活塞向离合器移动或略微进入离合器,并在牙齿接触时向后推几次。在0.3秒和大约20个响声事件之后,达到约1.7 mm的足够大的牙齿重叠。响声区域以黄色标记。在蓝色标记的区域中,离合器保持半接合位置。两个离合器部件之间的差速为零,即车辆通过轮胎滑动进行操作。高制动扭矩导致两个离合器部件之间的高摩擦力。不可能有轴向活塞运动。当车辆在0.84秒后到达静止时,制动扭矩以及离合器中的摩擦力减小,离合器移动到完全接合位置。这是用绿色标记的。
当然,所有模拟定时都取决于初始位置,即关闭过程开始时两个离合器部件之间的角度。因此,在所有模拟中都需要考虑这种统计变化。通过改变模拟中的初始位置,可以得出结论,对于所描述的设置,不能避免嘎嘎声,嘎嘎声时间在0.2 s的范围内。此外,对于至少1.5 mm的牙齿重叠,稳定的部分离合器接合位置似乎是可能的。
在下一模拟步骤中,检查关闭时间和部分接合时间分别对齿数,齿宽和间隙宽度的依赖关系。在这里,我们将间隙定义为两个狗牙之间的距离,由两个离合器部件中的每一个的狗牙宽度减小。在图3中,X轴上给出的不同齿数和Y轴上给出的不同齿宽的部分接合时间由颜色表示。
蓝色标记的区域代表快速参与时间。通过固定牙齿数量和牙齿宽度,间隙也会隐含地固定。如果狗牙的宽度固定并且牙齿数量增加(平行于X轴移动),则间隙减小。如果牙齿的数量固定并且狗的宽度增加(平行于Y轴移动),则间隙也会减小。具有相同相对间隙的配置,即具有相同分数的间隙宽度和狗牙宽度,由黑点线标记。该图表明,为了使参与时间低于0.3秒,需要一个或更大的相对差距。对于较小的相对间隙宽度,接合时间增加或离合器根本无法关闭。这些点用白色标记。额外的模拟表明,需要5°至10°之间的侧角才能确保紧急制动。

图3:关闭时间对牙齿数量和牙齿宽度的依赖性
为了考虑磨损对关闭时间的影响,在狗牙处假设可变高度的钱伯斯。据认为,随着磨损的增加,倒角尺寸也会增加。在模拟中,将两个狗牙离合器几何形状与一个的可比相对间隙宽度进行比较,但具有显著不同的牙齿数量,12和50。随着牙齿数量的增加,牙齿增加导致参与时间的急剧增加,从而导致响声事件。对于12颗牙齿的初始设置,仅可见接触时间的轻微增加。根据这些结果,具有更多牙齿的几何形状的接触时间似乎对磨损更敏感。
2.3
有限元分析
基于多体模拟,对不同接触位置的最有希望的几何形状进行强度分析。目标是评估破坏风险和疲劳影响。当然需要考虑,由于例如公差或错配,并非所有牙齿都完全接触。假设接触系数为0.5,这意味着只有50%的牙齿处于接触状态。在图4中,给出了上述模拟中使用的12齿狗离合器的紧急制动压力。对于所描述的场景,根部应力仍低于1100 MPa UTS极限,并且看不到牙齿断裂的风险。基于有限元模拟,可以根据牙齿的数量得出最小数量的牙齿,以确保足够的低接触压力和最小的狗,以降低牙齿断裂的风险。
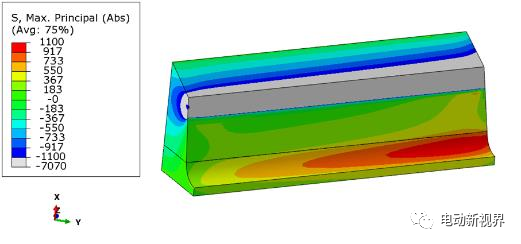
图4:狗在部分参与情况下的压力
虚拟控制策略开发
对于电动驱动单元中的多速变速器,狗牙离合器是非常感兴趣的。在这种应用中,换挡离合器时的高差动速度,离合器同步或高惯性是控制策略中具有挑战性的主题。这里离合器的嘎嘎声导致高磨损,不被接受或需要减少到最低限度。在控制发展的早期阶段,此类应用的策略多体模拟是测试和预校准控制器的有吸引力的机会。
3.1
用狗离合器换挡
作为基于仿真的控制策略开发的示例,使用重型E轴。这里使用径向狗牙离合器设计来在第一和第二齿轮之间切换。狗牙离合器通过气动制动系统移位。该设计允许三个位置。如果致动系统中的两个活塞侧都被加压,则狗牙进入或移动到中性位置并且不接合齿轮。仅加压一个活塞侧导致相应齿轮的接合。除了驱动列车中的大惯性导致高力和扭矩之外,狗牙离合器换挡的另一个挑战是有限的几何选项。由于驾驶舒适性原因,离合器中的间隙减小到在关闭离合器时需要低差动速度和高同步扭力的最小值。另一方面,如果差速太低,则在牙齿与牙齿接触时离合器的进一步闭合变得越来越困难,换挡时间增加。这种挑战可以通过设计特征部分补偿,例如狗牙尖上的角度,或狗身上的凹槽,以防止意外打开。
通常,离合器关闭过程如下。首先,当狗牙处于中立位置时,即两个活塞侧都被加压,离合器处的差速需要降低到可接受的范围。此同步通过电子机器完成。如果达到所需的同步速度,则减小机械扭矩并启动制动离合器,即相应的活塞侧减压。当离合器到达时,可以再次应用驱动机械上的接合位置扭矩。

图5:狗离合器参与
3.2
狗离合器移位模拟
图5给出了狗牙离合器关闭过程的模拟结果。在这里,红色是狗的位置或狗的位移,蓝色是由此产生的离合器扭矩作为时间的函数给出。0的位置对应于中性位置,对于5到7 mm之间的位置,离合器处于牙齿与牙齿接触,并且在7 mm以上离合器至少部分接合。未绘制模拟的第一秒中的同步阶段。1.1秒后,达到10转/分的目标差速,并开始关闭过程。在本例中,两个狗部件的第一次接触是牙齿对牙齿的接触。由于差速,狗部件沿着其齿尖轮廓移动,直到在额外0.088秒后到达间隙,并且一个狗牙可以移动到另一个离合器部件的间隙中。如果差速足够低,则在下一次接触时达到齿面的足够大的接触区域,并且致动力与狗底切一起支持在图中发生的完全接触。在离合器中产生高达约0.7 kNm的扭矩峰值。如果差速太高,则将狗推回,离合器开始嘎嘎作响。
为了定义合适的目标差分速度,对不同的同步速度和起始位置重复模拟。在图6中,同步(橙色)和参与(紫色)的定时是针对离合器处的几个差动速度给出的。对于高差分速度,需要低同步工作,因此同步时间随着速度的增加而减少。对于参与过程,一方面具有小的差速当然是有益的。但另一方面,在牙齿与牙齿接触的情况下进入间隙需要更长的时间。随着差动速度的增加,参与时间也会减少。随着差速牙齿与牙齿接触的进一步增加,越来越多地导致离合器的向后推。离合器开始嘎嘎作响或根本无法关闭。对于假设的变速系统仿真,10至30转/分范围内的目标差速是最佳的。
试验床上的控制策略优化
这些模拟结果也在测试床上进行了验证。当以高于35转/分的高差速接合狗牙离合器时,在一定时间内发出嘎嘎声的可能性越来越大,或者离合器根本无法关闭。随着差分速度的降低,这种响声事件的概率也会降低。但是在测试床上也可以看到,对于非常小的差动速度摩擦力,牙齿与牙齿接触防止两个狗牙离合器部件相互旋转并且离合器根本不关闭。通过调整牙齿几何形状,即在牙齿尖端的专用形状,这不能完全避免,并且需要相应地调整控制策略。

图7:测试床上的位移事件
在图7中,这种适应被解释为在测试床上从齿轮2到齿轮1的下移。x轴表示测量时间。在离合器位置的上图(橙色线)中给出。这里,高于20mm的值表示接合齿轮2,而对于接近零的值,接合齿轮1。5至20 mm之间的狗位置相当于中性位置。在第二个图中,给出了机械速度(紫色线)。由于无法直接测量差速,因此机器速度与传动输出速度一起用于控制目的。第三图(粉色线)显示了机械扭矩,而在第四图中突出显示了气动阀的状态。如果两个阀门中只有一个处于活动状态,则离合器被推入相应齿轮的方向。如果两个阀门都处于活动状态,则离合器进入中性位置,如果没有阀门处于活动状态,则应保持实际状态。根据图中的编号,齿轮换挡可分为以下步骤:
初始阶段:Gear 2已投入使用。为了允许离合器打开,机械扭矩已经减小到小值。
在第二步中,两个阀门都被制动,离合器移动到中性位置。
在步骤3中,同步完成。通过施加扭矩,机器加速。当达到目标速度时,扭矩再次减小,目标速度相当于所需的差动速度。
在步骤4中,尝试关闭离合器。相应的阀门加压。但是,由于牙齿对牙齿的接触,参与是不可能的。离合器停止并保持在5 mm的位置。
当离合器在一定时间间隔后无法关闭时,执行步骤5。两个阀门都被激活,离合器被移回中性位置。
在步骤6中,应用短扭矩峰值以再次产生一些差速。
在短暂的时间间隔之后,第二次尝试关闭离合器。现在,离合器移动到位置0 mm,齿轮1接合8。
在步骤8中,完成移位,并将扭矩再次应用于机器。通过像所示的适应性,可以在测试床上微调控制策略。
结论
在本文中,提出了一种基于模拟的狗牙离合器设计方法,该方法一方面有助于减少开发时间和成本,另一方面降低技术风险。已经在开发的早期阶段,可以通过使用多体模拟来定义和优化狗牙离合器几何形状。考虑牙齿数量,专用牙齿轮廓或不同材料的影响,并评估对离合器打开和关闭时间的影响。通过有限元模拟,可以确保足够的强度并避免断裂或疲劳效应。通过多体模拟获得的动态力已经作为所需边界条件的合理假设。除了几何设计适应模拟之外,还用于分析移位事件以及开发和预校准适当的控制策略。在进入硬件之前,可以通过这种虚拟方法达到高成熟度水平。最后在测试床上验证模拟。


