SimufactForming系列教程十四--后处理进阶教程(一)
SimufactForming后处理进阶教程
数值结果及其描述
为了使用户更好的理解并使用仿真的数值模拟结果,本章节对仿真的数值结果进行了相应的介绍。首先,本章节将可获得的数值结果进行了汇总。其次,本章节对各项数值结果的使用进行了详细的讲解,这也涉及到了一些相关的专业知识。
NOTE:工艺过程的改变和仿真设置的改变都会引起仿真数值结果的变化,比如有限元有限体积两种求解器的不同、薄片或钣金金属成形过程的不同、物理属性的变化(各向异性、轧制方向、薄板厚度等)。还有其他一些数值结果需要在成形过程中进行激活才可得到。
表1标准

等效塑性应变
等效塑性应变是金属成形过程中最基本的数值结果之一。等效塑性应变的计算是通过整合局部增量的应变率进行计算。成形过程中,材料的加工硬化现象与材料的塑性应变相互作用,当材料产生加工硬化后,其将会抑制材料的塑性应变。这在仿真中通常由工件材料的流变曲线描述。
等效应力
等效应力是由vonMises使用真实的复杂应力条件计算而出(由应力张量描述)。等效应力是一种相对值,其可以同任何具有单轴向应力状态的复杂的应力进行对比,这也是使用流量曲线描述的一个例子。
当等效应力达到流动应力值时,材料开始进行塑性流动。当等效应力没有达到流动应力值时,材料将产生可恢复的弹性形变,这在数值结果中以“等效弹性形变”来描述。
温度
仿真的数值结果中包含了工件和所用工具的温度结果(非等热模型)。温度的改变取决于热传导、辐射、环境热辐射率及工具接触后的热传导率,温度的变化同样受到耗散、摩擦及相变中潜伏热的影响。另外还包括外部热源的定义,比如感应加热或熔炉加热。
温度对材料的强度和流动应力也有着显著影响。当使用的流量曲线与温度相关时,该影响必须考虑在内。
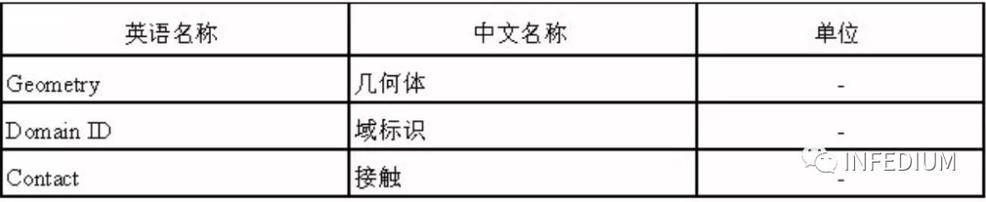
接触
模具接触代表仿真中工件表面同工具之间是否存在接触。对加工工具而言,该数值结果表明工具表面与工件之间是否存在接触。需注意,如果需要获得工具上的精确接触结果,需要对其进行细致的网格绘制。这个可以通过“质量面网格”选项直接进行创建,或者通过修改几何体→面网格重划分进行改进。
只有在可变形几何体(工件或工具)之间或可变形的几何体与刚体之间才可产生接触。软件并不包含两个刚体(线、面)之间的接触。
数值结果中的模具接触将会展示工件与模具之间变形的等效区域。在视图中,模具和模具的填充与填充不足都可看到,这也可以用于查看是否有皱褶区域出现。
模具法向距离
该选项可以查看以工件表面为基准,工件和工具表面直接的垂直距离。
在有限单元求解器中,该结果输出选项必须要手动激活,在有限体积求解器中,该结果输出是默认激活的,其可显示的最大距离为5mm,且可以在求解器的成形控制选项中进行调整。
等效应变速率
等效应变速率是软件通过vonMises方法计算得出,并使复杂的三维应变速率张量具有对比性。当确定使用流动曲线确定屈服应力时,等效应变速率与等效塑性应变及温度需要共同使用。
接触应力
接触应力用于描述两个表面接触时表面上的垂向的应力分布。
材料流动
该选项是用于显示工件材料的流动速度和方向,其依托的坐标系为固定全球坐标系。
域标识
当DDM方法被激活时,结果将对单个域进行分解展示。该数值结果展示方式只能在有限单元求解器中。
网格错误
在使用有限单元求解器时,当因为网格的啮合错误而使得计算终止时,该数值结果选项可以显示出网格错误的位置,其终止错误提示代码为1005或1009。
这些信息有助于用户快速查找劣质网格的存在位置,通过对网格劣质位置进行加密处理,或者对其新建一个网格重划分方式,都有助于解决网格错误的问题。另外,其他时间步长和网格重划分方式的设置都可对该错误进行优化避免。
厚度
在该数值结果中,展示出了工件的厚度,这对与薄板件的成型非常有用。当需要此数值结果时,需要在成形过程设置里激活该选项,并且该设置只能在有限单元求解器中使用。
表2全局

单元密度
该数值结果可以显示材料的密度分布
轧制方向
在使用各向异性模型时,材料的某些属性时通过方向进行定义,为了确定这些方向,在成形过程中就必须要定义好轧制的滚动方向和平移方向。该数值结果可以显示成形过程中的材料流动方向和所有工件的平移、旋转方向。各向异性的数值结果只能在有限单元求解器中使用。
屈服应力
在材料的塑性流动过程中,材料的屈服应力因其治金效应而增大。这种现象称为加工硬化,其在流动曲线中以不断增加的流动应力表示。新的屈服应力说明材料在经过成形处理后流动应力增大。
新的屈服应力是将实际等效塑性应变,等效在20℃、应变率为0.1的流动曲线中得来。如果最小应变率小于0.1,那么就用最小应变率来确定新的屈服应力。如果最小应变率高于2,那么数值结果中的屈服应力将会被取消显示。屈服应力结果查看选项只能用于冷成形中。
屈服应力的数值结果取决与材料的总类,用户需要自行考虑自身的仿真设置是否有助于屈服应力数值结果的重现。
外部压力
该数值结果可以显示模具负载分析中,模具所受到的外部压力。外部压力来自于成形仿仿真的过程。
可能的折叠
该数值结果选择可以显示工件中可能出现折叠的位置。因此需要确定面网格的节点与三角形网格之间沿该三角形法线的最小距离。为此,只有当软件判定某个三角形格子在另一个
“之上”时,该结果才被认为是折叠。如果确定的法线距离大于默认值,则判定使用该值,通常判定使用的默认值为有限体积元素大小的1.1倍。
这个结果只适用于有限体积求解器,且结果为无量纲。
可能的润滑剂坑
该数值结果视图可以看到可能导致底部填充不足的润滑剂坑。为此,软件需要判别工件表面所有节点到模具表面之间的最小距离。对于表面上的每个三角形网格,当网格中三个节点有两个超过了特定的判别距离,则该位置会产生一个可能会产生润滑剂坑的标记1(0或者1,0代表不满足条件,1代表满足上述判别条件)。如果出现新的可能会产生润滑剂坑的标记时,该值会继续累积,比如某个位置标记结果显示为5,说明此区域为五个产生润滑剂坑的位置。
这个数值结果只能在有限体积求解器中使用,且结果为无量纲。
表3温度传热

最高温度
最高温度数值结果展示了从成形开始到现在产生的最高温度。
该数值结果只能在有限单元求解器中使用。
热通量
该结果将每个体的热传导产生的传热现象进行了量化。
该数值结果只能在有限单元求解器中使用
X轴向温度梯度
该结果展示了温度梯度的变化规律,其展示的是关于X轴方向,当距离增加时温度衰减的变化规律。
Y轴向温度梯度
该结果展示了温度梯度的变化规律,其展示的是关于Y轴方向,当距离增加时温度衰减的变化规律。
Z轴向温度梯度
该结果展示了温度梯度的变化规律,其展示的是关于Z轴方向,当距离增加时温度衰减的变化规律。
表4位移量
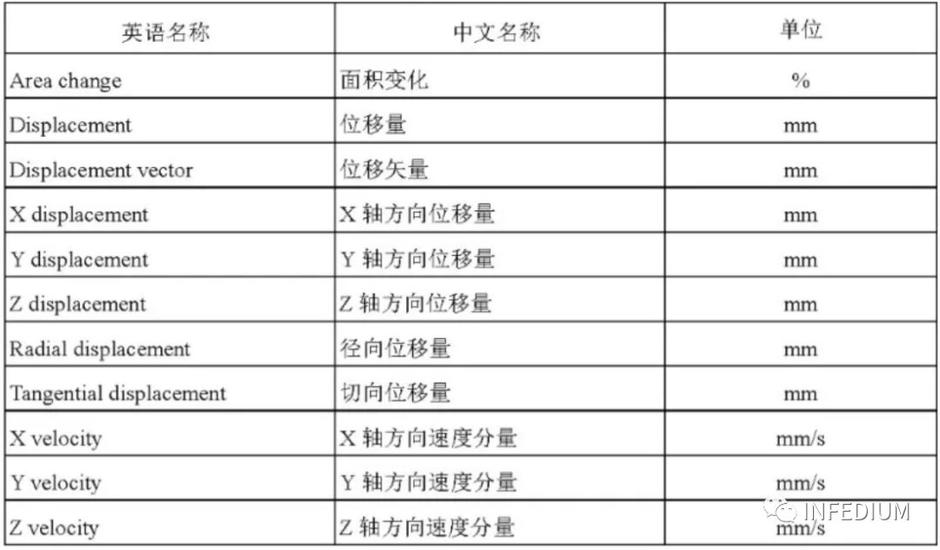

面积变化
该数值结果展示了工件表面变形引起的面积增加和减少。
该模块仅可在有限单元求解器下使用。
位移
该数值结果展示了工件及可变形工具的位移量。该位移量的确定以成形初始时的位置作为参考。除非用户在结果传递设置中禁用了位移结果转移,否则该位移量会随着多个工艺进程的增加而积累。工具的自动定位不会影响最终位移该模块仅可在有限单元求解器下使用。
X轴向位移分量
该数值结果展示了工件及可变形工具沿X轴方向的位移分量。该位移量的确定以成形初始时的位置作为参考。除非用户在结果传递设置中禁用了位移结果转移,否则该位移量会随着多个工艺进程的增加而积累。工具的自动定位不会影响最终位移该模块仅可在有限单元求解器下使用。
Y轴向位移分量
该数值结果展示了工件及可变形工具沿Y轴方向的位移分量。该位移量的确定以成形初始时的位置作为参考。除非用户在结果传递设置中禁用了位移结果转移,否则该位移量会随着多个工艺进程的增加而积累。工具的自动定位不会影响最终位移该模块仅可在有限单元求解器下使用。
Z轴向位移分量
该数值结果展示了工件及可变形工具沿Z轴方向的位移分量。该位移量的确定以成形初始时的位置作为参考。除非用户在结果传递设置中禁用了位移结果转移,否则该位移量会随着多个工艺进程的增加而积累。工具的自动定位不会影响最终位移该模块仅可在有限单元求解器下使用。
径向位移分量
该数值结果展示了工件及可变形工具位移矢量的径向分量,径向方向垂直于Z轴。该位移量的确定以成形初始时的位置作为参考。除非用户在结果传递设置中禁用了位移结果转移,否则该位移量会随着多个工艺进程的增加而积累。工具的自动定位不会影响最终位移该模块仅可在有限单元求解器下使用。
切向位移分量
该数值结果展示了工件及可变形工具位移矢量的切向分量,切向分量是环绕在Z轴周围的周向方向。该位移量的确定以成形初始时的位置作为参考。除非用户在结果传递设置中禁用了位移结果转移,否则该位移量会随着多个工艺进程的增加而积累。工具的自动定位不会影响最终位移
该模块仅可在有限单元求解器下使用。
X轴速度分量
该数值结果展示了材料流动速度矢量中关于X轴的分量。该数值结果只适用于可变形的几何体,不可用于刚体。
Y轴速度分量
该数值结果展示了材料流动速度矢量中关于Y轴的分量。该数值结果只适用于可变形的几何体,不可用于刚体。
Z轴速度分量
该数值结果展示了材料流动速度矢量中关于2轴的分量。该数值结果只适用于可变形的几何体,不可用于刚体。
径向速度分量
该数值结果展示了工件和弹性工具材料流动速度矢量中的径向分量。径向方向垂直于Z轴。
切向速度分量
该数值结果展示了工件和弹性工具材料流动速度矢量中的切向分量。切向方向平行于Z轴。
表面误差
该数值结果展示了表面在法线方向的位移量。
表5应变
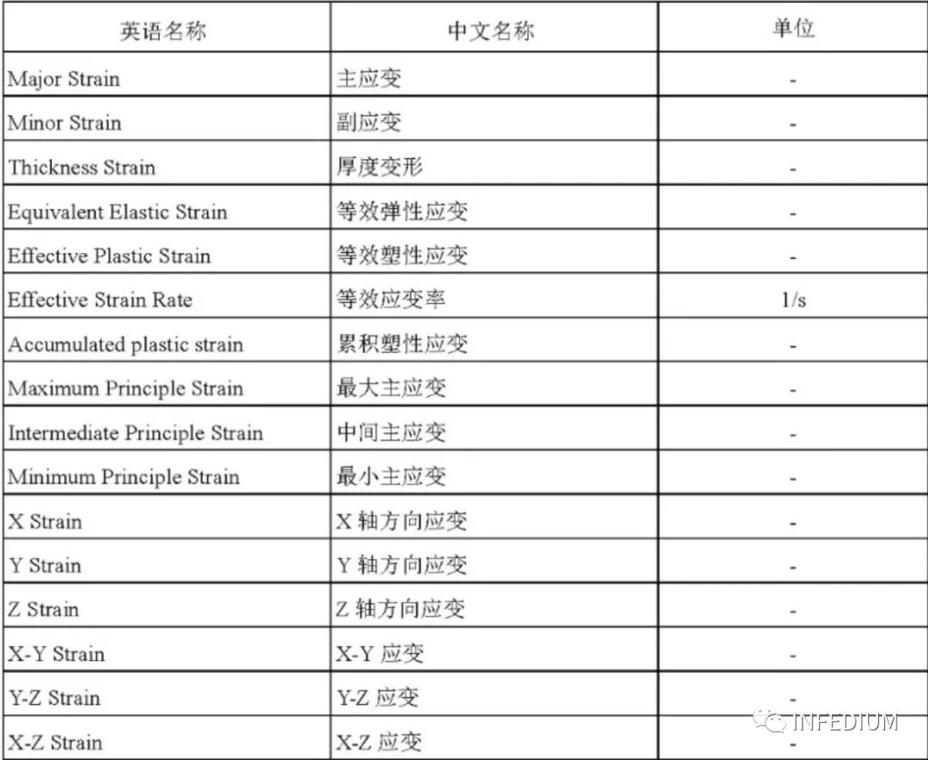
主应变
主应变的数值结果显示主要应用在薄板成型的工艺仿真中,并且只有在激活钣金成型的模块后,该数值结果才可使用。主应变代表钣金在成型过程中的最大应变。主副应变的数值结果同样可在粒度分布图中激活使用,使其在成型极限分布图中转换出成型极限曲线。
副应变
副应变的数值结果显示主要应用在薄板成型的工艺仿真中,并且只有在激活钣金成型的模块后,该数值结果才可使用。副应变代表钣金在成型过程中的最小应变。主副应变的数值结果同样可在粒度分布图中激活使用,使其在成型极限分布图中转换出成型极限曲线。
厚度应变
厚度应变数值结果是在钣金成型中,为垂直于钣金平面方向的应变进行细致的描述。本数值结果应用模块只有在钣金成型工艺中才可被激活使用。
等效弹性应变
等效弹性应变与有效塑性应变想对应,不同的是,有效塑性应变是对塑性应变大小进行量化,而等效弹性应变是对弹性应变比例进行量化,通常等效弹性应变比有效塑性应变低的多。
然而,弹性形变却不能因其变化值小而被忽略,尤其是进行冷成形工艺时。在工具的拆卸移除时,弹性形变也很大程度上得到回复,但工件中还存在着由残余应力引起的弹性形变。
累积塑性应变
累积塑性应变是同有效塑性应变所对应的参考量,其不同点在于:在加热或热处理时,有效塑性应变可以通过归零的手段对再结晶状态进行匹配,并考虑相应的减少流动应力。与此相反,累积塑性应变不可被重置。这表明,类似的进行一个案例孔隙率的查看时,所有塑性应变的相关选项都将不可用。
最大、中间、最小主应变
这些数值结果描述了主坐标系中的应变张量。其最大、中间、最小主应变的矢量方向与主坐标系方向相同。
X/Y/Z/X-Y/Y-Z/X-Z方向应变
以上这些数值结果表示应变张量在笛卡尔坐标系中各个方向上的分量大小。
表6应力


应力是指由物体所受外力而产生作用于物体内部的“分布力”。在结构力学中,可以对处于机械平衡中的物体,通过分段积分的方法对物体任何部分面积内的载荷进行求解。无穷小区域dA上的应力矢量t:
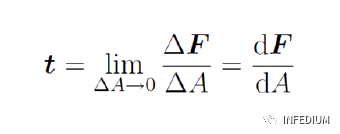
应力矢量的大小和方向取决于界面的方向,用法向量n来表示。三个方向的应力矢量垂直于全局坐标系的三个坐标轴。此外,描述每个应力时,需要垂直于每片区域上的两个剪切应力。

其中,δij为正应力,τij为剪应力,第一个指数i表示方向(1为X轴方向、2为Y轴方向、3为z轴方向),第二个指数表示剪切应力分量的方向。δ11,δ22,δ33为正应力,其他所有的分量都是剪切应力。
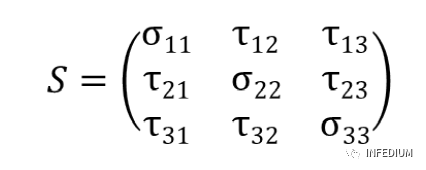
因对称的应力张量是相等的,故此,应力状态是由6个独立变量来进行描述。
单个的应力分量不足以描述工件体积上的载荷,因此需要大量的应力分析结果来对总结果进行评估。在后文中,将对单一应力进行详细描述。
主应力
根据单个元中坐标系的方向,可获得不同的应力值。该数学物理方法可用莫尔圆s应力分布图进行描述:
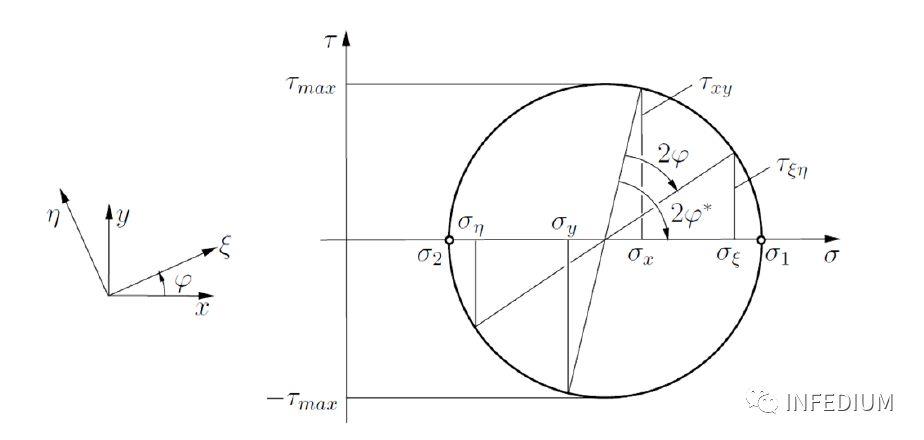
该应力分布图的前提假设为:假定坐标系下的一个方向后,不考虑剪切应力,只考虑主应力,这些由主应力所对应的坐标系系统称为主应力坐标系系统HST。

应力张量和主应力张量
主应力定义:δ1>δ2>δ3
上述主应力可由以下方程计算得出:

I,IⅡ,IⅢ被称作应力张量中的恒定值,其独立于坐标系统,也同时用于描述用力状态。
Iδ为主对角线上的和:
Ⅱδ为两行子行列式的和:

IIIδ为应力张量行列式:

主应力是正应力的极值,没有小于δ3的正应力,也没有大于δ1的正应力。
最大主应力
最大主应力是主应力矢量中的第一分量(最大分量)。该值用于描述主应力中产生的最大应力。如果该应力为正值,这是为拉应力。相反的,负值为压应力。最大主应力主要用于评估可能发生的损坏,因为在任何金属成形过程中,拉应力是有关材料及工具寿命的关键参考量。因此,在设计中,应尽可能减少较高拉应力的产生。
最大主应力也被用于工件材料的流动性能评价,该变形通常发生在最大主应力的作用方向上。
中间主应力
中间主应力是主应力矢量的第二个分量,该值描述了最大和最小主应力所对应垂直方向的应力,在这里,中间主应力是为数值结果的完整性所提供,通常不被用于评估成形过程。
最小主应力
最小主应力是主应力矢量的第三个分量,该数值结果可以用于评估成形过程,比如说:
当最小主应力为正值时,由于其他主应力都大于最小主应力,所以在成形过程中出现裂缝的风险大大增加。
平均正应力
等效应力中最主要的数值就是平均正应力,它用于描述莫尔圆应力分布图的位置(非直径、非剪切应力)。平均正应力不会引发任何塑性流动,但可以描述变形区的应力分布状态。
平均正应力的计算方式为:
平均正应力对材料的可成形性有着显著的影响,压应力提高了材料的可成形性,而拉应力减少了材料的可成形性并加快了裂纹的发展。
三轴
三轴性是塑性变形过程中用于描述可成形性的无量纲,其值可正可负。
X/Y/Z方向应力
这些数值结果为垂直于工件或可变形工具截面上的正应力。数值结果的方向是由坐标系决定,例如,当截面垂直与坐标系X轴时,该截面上X轴方向应力与X轴平行。
在此之后,正应力将以作用于相同坐标系工件上的均匀载荷来说明。
无摩擦镦粗中的均匀载荷
接触面上施加了沿Z轴方向的均匀载荷
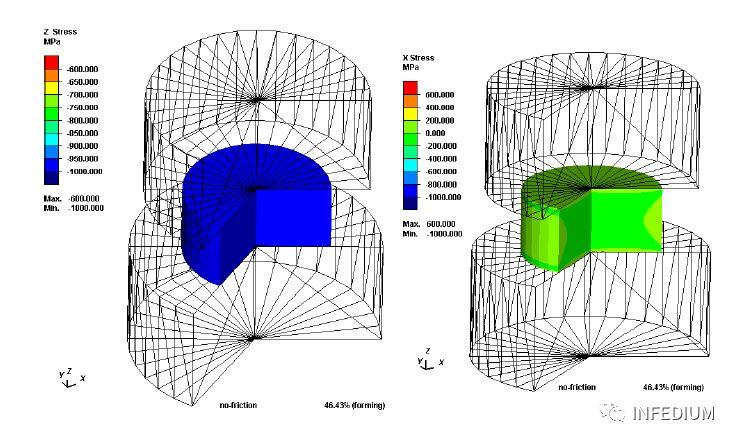
正应力
Z轴方向正应力表示有镦粗引起的Z轴方向上的正应力大小。由图可知,在整个工件中,Z轴正应力都为负值,其为压应力。在X轴方向上,应力几乎为零。Y轴方向上也同样为零(图片未给出)。两个方向的应力状态未给出,因此,上图只给出了单轴应力状态。

圆柱辙粗中的正应力(有摩擦)
在涉及到摩擦的圆柱镦粗案例中,获得的Z轴正应力如图所示,图中,X轴正应力不再为零,而是有正有负(正值在膨胀区域),因此X轴正应力中的正值表示在X轴方向上的拉应力。
X轴正应力
δxx为X轴正应力,其含义是X轴方向上,垂直与YZ部分的应力分量。在轴对称的二维模拟中,X轴正应力同径向应力相同。
Y轴正应力
δyy为Y轴正应力,其含义是Y轴方向上,垂直与XZ部分的应力分量。在轴对称的二维模拟中,Y轴正应力同切向应力相同。
Z轴正应力
δzz为z轴正应力,其含义是z轴方向上,垂直与XY部分的应力分量。在轴对称的二维模拟中,z轴正应力同轴向应力相同。
X-Y应力
τxy被称为X-Y应力,其含义是:Y方向上垂直于YZ截面上的应力分量。由于应力张量的对称性,τxy与τyx的绝对值相同。
Y-Z应力
τyz被称为Y-Z应力,其含义是:Z方向上垂直于XZ截面上的应力分量。由于应力张量的对称性,τyz与τzy的绝对值相同。
Z-X应力
τzx被称为Z-X应力,其含义是:X方向上垂直于XZ截面上的应力分量。由于应力张量的对称性,τzx与τxz的绝对值相同。
径向应力
径向应力以z轴为导向,如下图所示,杯突成形中的径向应力分布。材料流动方向沿径向应力方向流动,因此会产生较高的接触应力。从而导致径向应力的增高。

切向应力
切向应力是作用于Z轴与圆周方向相切的应力分量。该结果可以用来预估表面裂缝的危险程度:
工件中如果存在较高的切向应力,这会降低成形性,并且可能在其表面产生裂缝。
工具中如果存在较高的切向应力,其耐用性会大大降低。
摩擦比
该数值结果展示了切向摩擦应力矢量与接触应力的法向分量之间的比值,其满足库伦摩擦、剪切摩擦、组合摩擦三种摩擦定律(该结果不满足IFUM摩擦定律)。
摩擦应力
摩擦应力是由两个物体的面接触所产生,没有摩擦接触不会产生摩擦应力。根据所选择的摩擦模型,可以直接计算出接触面上的摩擦应力(库伦模型),也可直接计算出剪切应力(剪切应力模型)。摩擦应力为接触产生,且与接触表面相切。
X,Y,Z摩擦应力
X,YZ摩擦应力代表坐标系**定方向上的摩擦应力分量。
径向摩擦应力
径向摩擦应力是摩擦应力矢量在两个接触体上沿径向方向上的分量,其方向垂直于Z轴。
切向摩擦应力
切向摩擦应力是摩擦应力矢量在两个接触体上沿切向方向上的分量,其为Z轴的旋转方向。
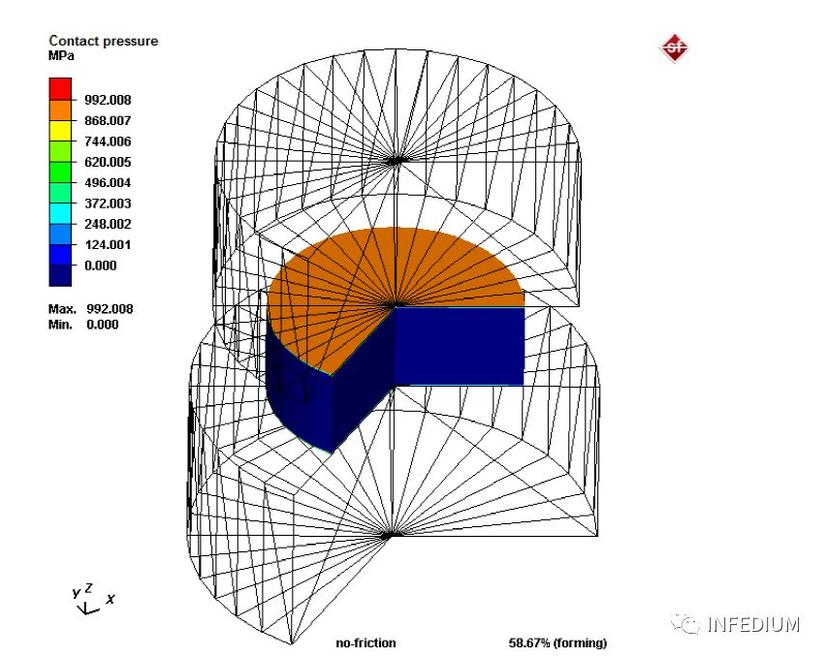
接触压力
接触压力描述了垂直两个接触体的接触面上的压力。
X,Y,Z接触压力
X,Y,Z接触压力是指两个接触体接触所产生的压力在坐标系的指定方向上的压力分量。
径向接触压力
径向接触压力是两个接触体接触所产生的压力沿径向方向上分量,其方向垂直于z轴。
切向接触压力
切向接触压力是两个接触体接触所产生的压力沿切向方向上分量,其方向为Z轴的旋转方向。
X,Y,Z轴向力
这三种数值结果只能在有限单元求解器中使用。其表示接触压力矢量沿X,YZ三个方向上的力分量。
径向力
该数值结果为工具表面节点接触力的径向分量,径向方向垂直于Z轴。该数值结果只适用于有限体积求解器。
切向力
该数值结果为工具表面节点接触力的切向分量,切向方向为Z轴的旋转方向。该数值结果只适用于有限体积求解器。
力向量
力向量是工具表面节点接触力的可视化结果,其后处理只能用于有限体积求解器。
应力向量
应力向量是应力张量与横截面法向量的乘积,为其数值结果提供可视化效果。
最大、中间、最小主应力张量
最大、中间、最小主应力张量是一阶应力张量,其不可与主应力张量相混淆。张量代数将一阶张量定义为一个向量,因此,主应力向量会按照以上数值结果进行可视化显示。
主应力向量表示相应的主应力的作用方向。比如,最大主应力张量代表着拉伸(如果其值为正)应力的方向,该数值结果在评估工件或者模具的裂纹风险有着重要作用。
在一个无摩擦案例中,最小主应力和相应的最小主应力张量分布如下图所示。由于没有摩擦,所以图中只存在平行于z轴的压应力。

最小主应力和最小主应力张量
当镦粗成形过程中带有摩擦时,主应力方向和幅度变化如下图所示。
向量总是指向坐标轴的正方向。为更好的符合应力平衡的条件,同样大小的应力其方向相反,但没有展示出更好的可视化效果。
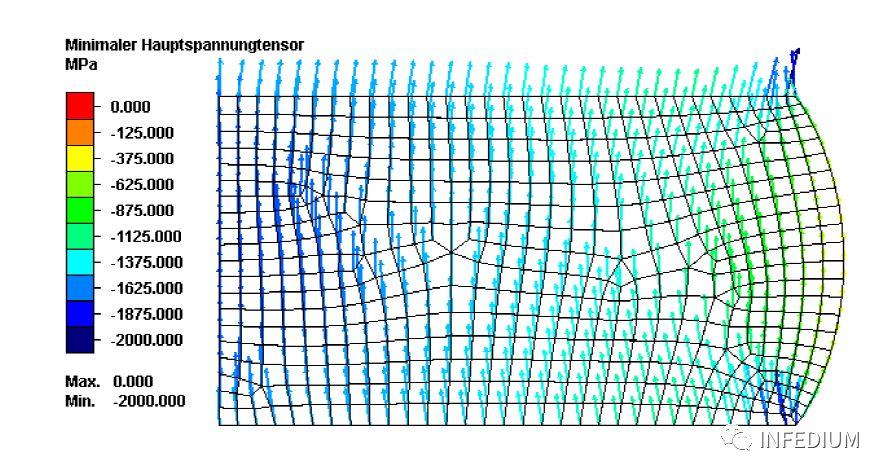
考虑摩擦的辙粗过程中主应力张量分布图
接触压力向量
接触压力向量定义为垂直于两个接触体的接触面上的应力张量分量。因此,接触压力向量只适用于查看表面应力张量分布。
摩擦应力向量
摩擦应力发生于两个相互接触的物体的接触面上。根据所选择的摩擦模型,可以直接计算出接触面上的摩擦应力(库伦模型),也可直接计算出剪切应力(剪切应力模型)。摩擦应力向量是与接触表面相切的摩擦应力。
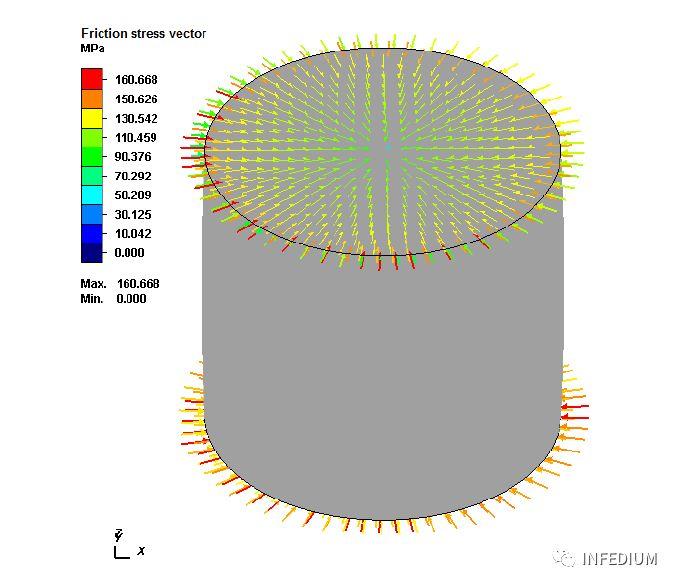
考虑摩擦的镦粗案例中摩擦应力向量分布图
NOTE:在二维仿真中,摩擦应力向量垂直与它们的实际方向。其避免了所有向量混淆到一行中,增加了视图的可读性。

二维仿真中的摩擦力向量
表7相变
相变
相变可在金属成形和热处理工艺中激活使用,比如模压淬火。如果要仿真相变,则需为材料提供相应的相图,还必须在成形控制中选中激活“相位变换”选项。在模拟时,软件将依照每个局部的相位组成的变化,对材料的性质进行计算。
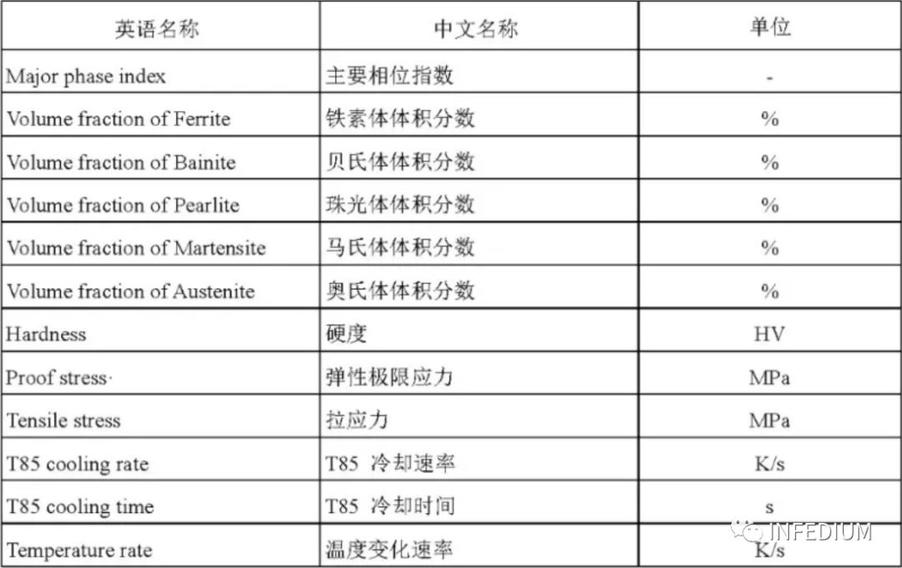
主要相位指数
主要相位指数是指具有最大体积份数的相位。
马氏体、铁素体、珠光体、贝氏体、奥氏体体积份数
在此数值结果中将会显示出马氏体、铁素体、珠光体、贝氏体、奥氏体体积分数。
硬度
该数值结果将预测工件在冷却到室温之后,其金相组织不在发生变化时的硬度。其结果是由所模拟的拉伸强度所确定,并根据ENISO18265:2003进行硬度的转换。
在仿真中材料所定义的硬度曲线的第一个值被当作起始硬度,如果冷却速率高于曲线中的最末值,则取最后一个值作为起始硬度。
弹性极限应力
弹性极限应力是由T85冷却时间计算得出。该值为纯粹的后处理计算值,对模拟的过程没有影响。
拉伸应力
拉伸应力是由T85的冷却时间计算得出。该值为纯粹的后处理计算值,对模拟的过程没有影响。
T85冷却速率
T85冷却速率是将工件由800度冷却到500度过程中的平均冷却速率。
T85冷却时间
该时间为工件由800摄氏度冷却到500摄氏度所使用的时间,该时间值对工件的相变状态至关重要。
温度速率
温度速率是用来形容冷却速度的量。
表8电磁


表9损伤

该部分数值结果介绍了几个损坏模型的损坏值。
损伤模型的理论背景是,当金属产生塑性形变时,夹杂在材料中的孔隙为减少横截面积所承受的载荷,孔隙会不断发展变大。这些孔隙的发展最终导致裂纹的产生。损伤模型的机理基于塑性形变,因此,该模型不能用于预测刀具的寿命。更多关于损伤模型信息,请参阅章节“损伤和模具磨损”。
若需要使用该数值结果,则必须在成型过程中激活“损坏”选项并选取相应的损坏模型,所选取的损坏模型必须在材料属性中参数化。
绝对损伤(Lemaitre模型)
绝对损伤D为带有孔隙的体积单元饱和后的判定值。如果D=0,那么判定材料中没有损伤。如果D=1,那么整个单元横截面内全由孔隙填充。普通钢材在冷成型过程中,D值达到0.1到0.3之间才会出现损伤。当温度升高后,延展性也会升高,其D值也会相应的提高,比如,铜在热成型中,其D值能达到0.9。
该结果中,绝对损伤表现为累积损伤。
只有材料的绝对损伤不足以引起材料的宏观裂纹。因此还需要其他“不”条件,比如,往复拉伸-挤压应力的应力状态、材料的不均匀性、金属晶格去屑等都会引起材料裂纹。以上列举的“不利”条件不可通过数学计算得出,因此在数值模拟中很难被定义,但对于应力和应力状态来说,在仿真中可以很简单的定义临界值。通过定义临界损伤Dc参量来量化变形区域内产生裂纹的易损性。与绝对损伤数值相比,Dc的数值结果与其相反。
相对损伤(Lemaitre)
与材料的绝对损伤D、易损性De不同的是,相对损伤对材料的实际易损性趋势进行了计算。当D和Dc两个值相近时,就会产生宏观裂纹。在simufactforming中,该值被称作相对损伤(基于Lemaitre)。当相对损伤数值越接近1时,材料越有可能产生裂痕。
损伤
在有限元分析过程中,软件基于Cockroft、Latham和Qyane损伤预测假设,会对材料的损坏数值进行计算并累积到一起。所以在仿真结束时将达到损坏数值的最大值,但结果中并没有损坏发生的临界值。
由于预测损伤数值的一些参数与温度无关,所以损伤模拟不适用于热成型工艺。
损伤数值依赖于材料需要成型的几何形状,这导致不同的成型过程会产生不同的最大损坏数值。评估损伤模型时,拉应力应占主导地位。这是因为压应力一般情况下不会导致损伤的发生。此外,拉应力大小与延展损伤之间存在着因果关系。
当没有确切的物理性能数值提供给损伤数值求解时,可以使用一下几种方法之一:
1.通过对整个工件的损伤数值结果进行分析,损伤数值最大的部位最容易发生损伤。
2.将模拟结果与实际生产过程联系起来,通过实际生产过程中的经验去预测损伤最大值。然后以此为参考对仿真后大于该取值的部分进行针对性优化。需要注意的是,使用此方法需要确定所有的成型过程操作都需与实际测试一一对应。
表10模具磨损

该选项下数值结果的使用需要在成型过程控制中激活并选择合适的模具磨损模型。选择的模具磨损模型后需要设置详细的摩擦对象参数。
模具磨损
该数值结果显示了成型过程中单此行程的模具磨损。工具的几何形状并没有被预测的模具磨损值所改变。
注意:该数值结果的精度不如其他数值结果的精度,因为模具的磨损本质上是高度非线性的,其目前不能完全有模具磨损模型所描述。但该数值结果所预测趋势的正确性,该数值结果可以很好的用于成型过程的优化和模具的评估。
相对滑动速度
相对滑动速度是指工件表面与模具表面相接处区域的相对滑动速度。
表11微观结构
表12合金元素
![]()
表13扩散

完


