如何准确估计机器人的状态,增强机器人控制的精度及稳定性

在机器人学中,状态估计和控制一样,是无法避开的问题。
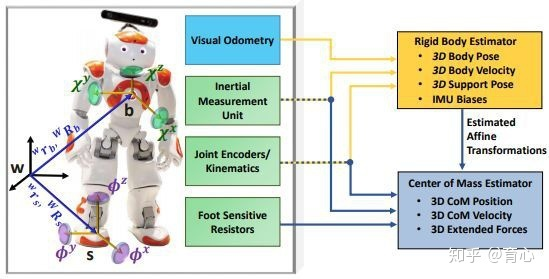
任何传感器的精度都是有限的,如何利用传感器信息,尽可能准确地估计一组完整描述机器人随时间运动的物理量,如位置、速度、加速度、角度、角速度等,是状态估计领域要解决的最主要问题。因此,稳定、准确的状态估计是机器人稳定控制的必要基础。
经过多年的发展,状态估计理论已经有了许多直接、重要的结果,比如卡尔曼滤波器、最小二乘优化、粒子滤波器等,这些结果在解决目标跟踪、定位、建图、轨迹融合等问题中占据着核心位置。
尽管有《机器人学中的状态估计》这本书能帮助我们系统学习状态估计的理论知识,但是面对1000 个纯理论的公式推导,以及每种方法的数种解法,我们往往很难坚持下来,从开始翻书学习到反复推导公式,到坚持不懈地推导公式,到努力坚持,到最终放弃!
>>状态估计第一期学员课程感想<<
我们,可能有千万个放弃的借口;但是,我们更有必须努力的理由!我们需要提升自己,具备解决更多问题的能力! 这次必须要认真坚持学习!
深蓝学院联合高翔博士,耗时7个月精心打磨,重磅推出『机器人学中的状态估计』在线课程,帮助大家梳理状态估计理论重点知识,总结公式背后表达的结论以及意义,将理论与应用结合,更透彻理解书中重点公式,更快、更好地搭建状态估计知识体系!
登录后免费查看全文
著作权归作者所有,欢迎分享,未经许可,不得转载
首次发布时间:2022-01-13
最近编辑:2年前

签名征集中

相关推荐
最新文章
