首页
发现
课程
培训
文章
案例
问答
需求
服务
行家
赛事
热门搜索
发布
消息
注册
|
登录
机器人
关注
简介
动态
课程
培训
服务
文章
回答
行家
【机器人】robot dog with 4 legs小小机械狗结构3D图纸
【机器人】robotdogwith4legs小小机械狗结构3D图纸Solidworks设计部分图片来源及下载此模型的网址如下:https://grabcad.com/library/robot-d...
机械狗社区David
签名征集中
1245
251 基于matlab的动态粒子群算法
基于matlab的动态粒子群算法。普通粒子群算法无法感知外界环境的变化,在外界环境发生改变时无法实时进行响应,因而缺乏动态环境寻优能力。在...
explicit-z
轴承动力学仿真
11974
Q1全球智能手机出货达2.97亿部/工信部明确UWB频率:RFID将腾退800MHz频段/6G标准
一周产业要闻本文摘要:(由ai生成)2024年一季度全球智能手机出货量增6%,小米增长最快,三星出货量最多,苹果均价上升。折叠屏和GenAI技术推...
射频学堂
学射频,就来射频学堂。
5873
249 基于matlab的MED、OMEDA、MOMEDA、MCKD信号处理方法
基于matlab的MED、OMEDA、MOMEDA、MCKD信号处理方法。最小熵反褶积(MED),最优最小熵反卷积调整卷积(OMEDA),多点最优最小熵解卷积调整(Multi...
explicit-z
轴承动力学仿真
11547
商用车电动变速器用气动和机电执行机构的比较
电动车动力系统中的气动与机电执行机构选择的关键因素在选择电动车动力系统的气动或机电执行机构时,需要考虑一系列关键因素。首先,必须明确...
电动新视界
新能源汽车相关技术信息分享,新...
7398
245 基于matlab的MEEMD信号分解及重构算法
基于matlab的MEEMD信号分解及重构算法。MEEMD方法的主要步骤包括:1.定义多元信号集合,将多个信号进行集合;2.对多元信号集合进行EEMD分解,...
explicit-z
轴承动力学仿真
12511
【机器人】6705 Wildcat5e 2020 FRC比赛机器小车3D图纸 INVENTOR设计
【机器人】6705Wildcat5e2020FRC比赛机器小车3D图纸INVENTOR设计部分图片来源及下载此模型的网址如下:https://grabcad.com/library/6705-wil...
机械狗社区David
签名征集中
3365
【机器人】mg90s伺服机械臂结构3D数模图纸 INVENTOR设计
【机器人】mg90s伺服机械臂结构3D数模图纸INVENTOR设计部分图片来源及下载此模型的网址如下:https://grabcad.com/library/arm-v1-2来源:机械...
机械狗社区David
签名征集中
3934
【机器人】多履带举升机器人3D数模图纸 Solidworks18设计
【机器人】多履带举升机器人3D数模图纸Solidworks18设计来源:互联网来源:机械图纸狗
机械狗社区David
签名征集中
3531
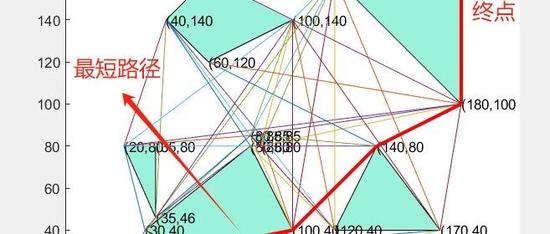
241 基于matlab的Dijkstra算法进行路径规划
基于matlab的Dijkstra算法进行路径规划。可根据实际情况输入障碍物和起止点坐标信息;输出避碰最短路径;能够利用切线图算法对障碍物区域进行...
explicit-z
轴承动力学仿真
12007
1
2
3
4
5
6
304
粉丝数
13697
VIP会员
学习
福利任务
兑换礼品
下载APP
联系我们
微信客服
联系客服
人工服务时间为周一至周五的9:30-19:30
非工作时间请在微信客服留言
客服热线:
4000-969-010
邮箱:
service@fangzhenxiu.com
地址:
北京市朝阳区莱锦创意园CN08座
帮助与反馈
返回顶部