首页
发现
课程
培训
文章
案例
问答
需求
服务
行家
赛事
热门搜索
发布
消息
注册
|
登录
机器人
关注
简介
动态
课程
培训
服务
文章
回答
行家
案例分享-双履带城市侦察机器人的性能虚拟验证
侦察机器人必须能够在各种驾驶条件下执行任务,在城市环境执行任务时可能会遇到机动性的极端挑战,比如攀爬楼梯。由主履带与子履带共同构成的...
RecurDyn
在这里得到RecurDyn资讯!
2269
未来工厂的五大属性
致力于数字孪生体技术的研究与发展通过解决方案和工程化应用造福人类来源:控制工程中文版作者:VinayBhanot导读:了解未来工厂的5个属性。企...
数字孪生体实验室
围绕数字孪生技术的创新研发,推...
2039
多传感器融合标定算法汇总
致力于数字孪生体技术的研究与发展通过解决方案和工程化应用造福人类来源:自动化与仪器仪表导读:多传感器数据融合是一个新兴的研究领域,是...
数字孪生体实验室
围绕数字孪生技术的创新研发,推...
2259
工业机器人视觉直播,4天速成视觉方案制定和代码编写及验收
作者|指南车机器人科技仿真秀平台认证机构首发|仿真秀App导读:机器视觉应用领域广阔,发展空间巨大。横向上,机器视觉的应用将渗透至更多行业...
仿真圈
技术圈粉 知识付费 学习强国
3665
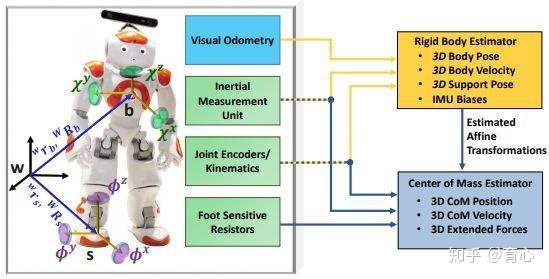
如何准确估计机器人的状态,增强机器人控制的精度及稳定性
在机器人学中,状态估计和控制一样,是无法避开的问题。任何传感器的精度都是有限的,如何利用传感器信息,尽可能准确地估计一组完整描述机器...
深蓝学院
签名征集中
1978
公开课精华|机器人的带约束轨迹规划
本文章总结于大疆前技术总监,目前在卡内基梅隆大学读博的杨硕博士在深蓝学院的关于机器人的带约束轨迹规划的公开课演讲内容。--------全文约...
深蓝学院
签名征集中
2825
公开课精华 | 移动机器人视觉三维感知的现在与将来
本文总结于香港科技大学王凯旋博士关于移动机器人视觉三维感知的现在与将来的公开课,其中主要介绍了基于视觉的三维环境感知方案,包括传统方...
深蓝学院
签名征集中
3015
全网超全 | 机器人顶会IROS 2021 论文集!
自上次整理了ICRA2021论文集后,好多朋友问:有没有IROS2021的论文集?我心里一咯噔,糟了,不会是跟ICRA一样难找吧!结果去网上扒一扒,查一...
深蓝学院
签名征集中
2793
掌握机器人自动化技能 迎接高薪未来
随着智能制造的不断推进,工业机器人作为发其展基石备受关注。《中国制造2025》规划中提出,要把智能制造作为信息化与工业化深度融合的主攻方...
指南车工业机器人
教育改变命运 技术赢得尊重
5319
2022年人工智能领域发展七大趋势
人工智能已成为人类有史以来最具革命性的技术之一。“人工智能是我们作为人类正在研究的最重要的技术之一。它对人类文明的影响将比火或电更深...
行业观察
观世界,看未来!
2437
1
277
278
279
280
281
301
粉丝数
13487
VIP会员
学习
福利任务
兑换礼品
下载APP
联系我们
微信客服
联系客服
人工服务时间为周一至周五的9:30-19:30
非工作时间请在微信客服留言
客服热线:
4000-969-010
邮箱:
service@fangzhenxiu.com
地址:
北京市朝阳区莱锦创意园CN08座
帮助与反馈
返回顶部











.jpg?imageView2/0/w/550/h/308)
.jpg?imageView2/0/w/100/h/100)


