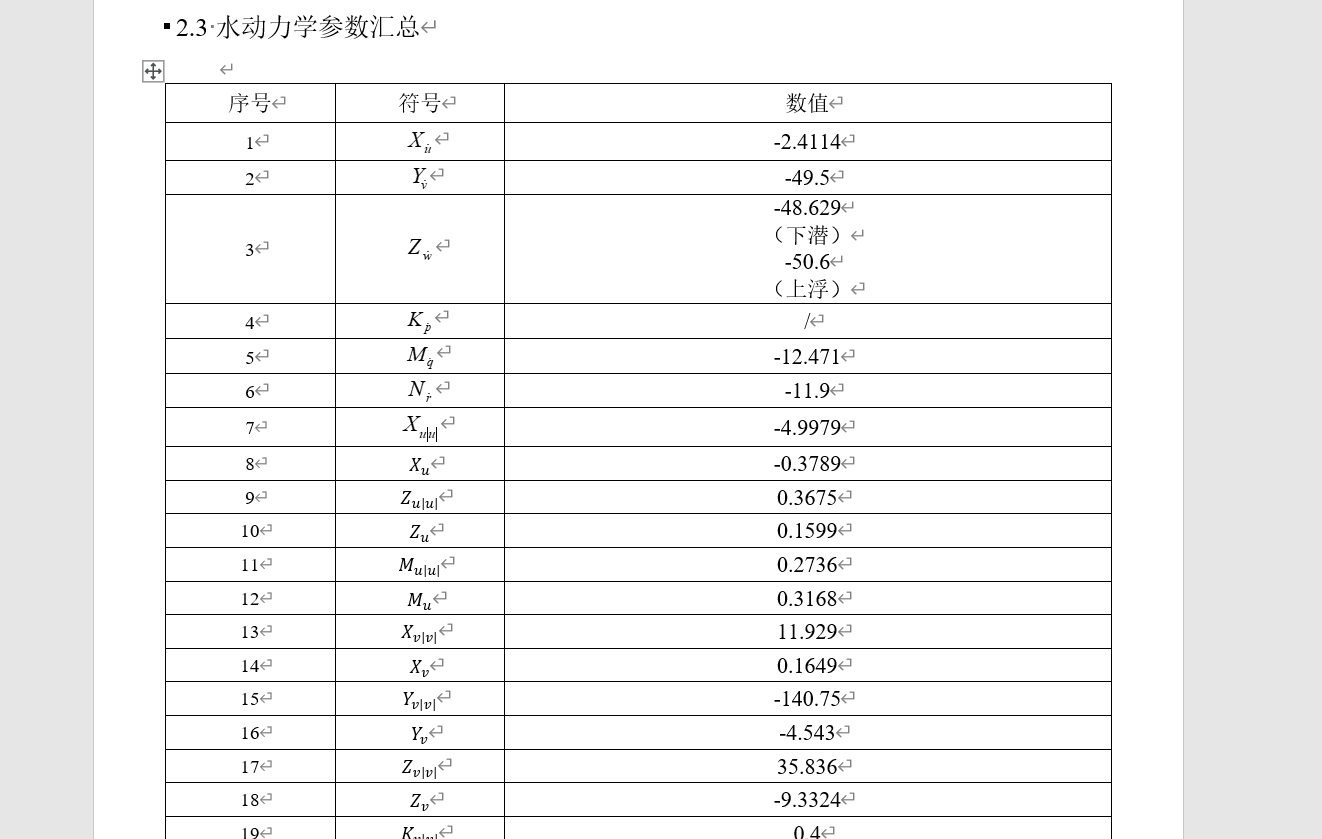
UUV水动力系数计算
¥500起
- 仿真分析
- 5分(暂无评价)
简介
评价
服务描述:
针对AUV、ROV、ARV等水下机器人,计算其各项水动力参数(惯性力与粘性力水动力参数);
使用软件为Star-ccm+,提供计算报告、源数据;可提供算例文件;
工期一周,自下单之日起算,自有工作站。
擅长领域:
水下机器人总体设计及CFD仿真技术研究。
成功案例:
针对某直径为150mm的自研AUV,开展水动力参数计算,使其应用到AUV运动控制中,湖试结果表明,AUV定向、定速、定身、路径跟踪、区域搜索等功能优异,计算所得的水动力参数准确。
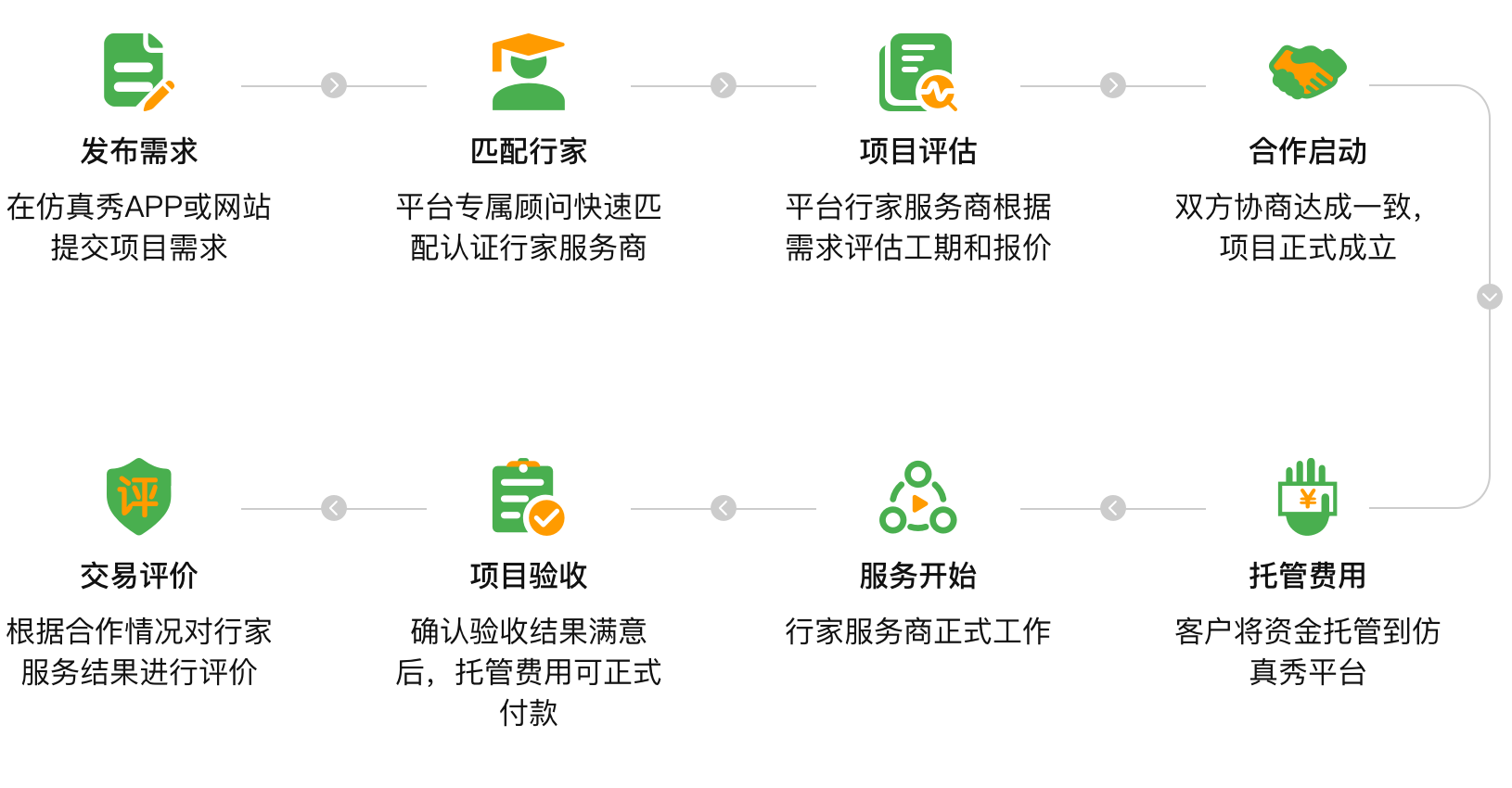
服务流程:

硕士
|
海洋装备系统工程师
砥砺前行
