

机器人仿真及建模
¥500起
- 仿真分析 ; 其他服务
- 5分(暂无评价)
简介
评价
服务描述:
1、对各种机器人进行运动学、动力学等分析
2、对机器人进行奇异性分析、灵巧度分析及力传递性能分析
3、对机器人进行MATLAB和ADAMS进行联合仿真
4、对机器人进行刚度建模及性能分析
5、对机器人进行轨迹、步态优化
6、对机器人进行性能优化
7、对机器人进行动力学参数识别
8、对机器人进行静力学,模态,多刚体动力学分析等
擅长领域:
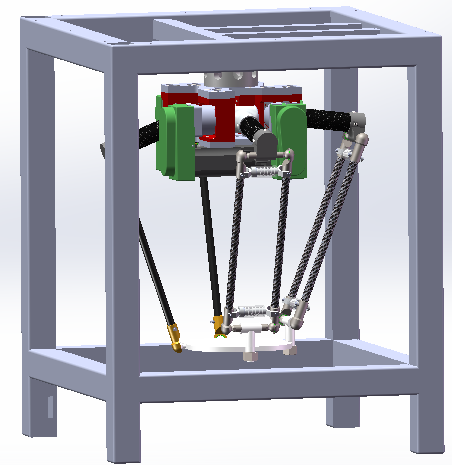
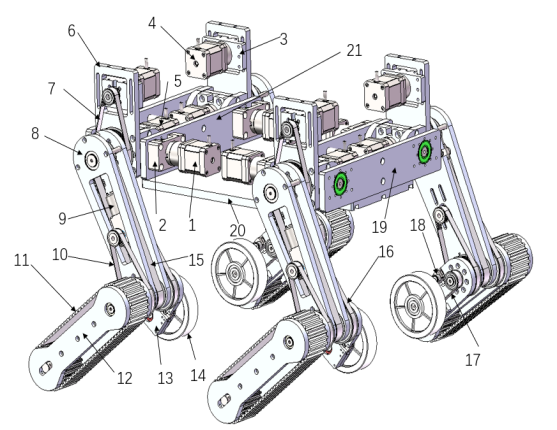
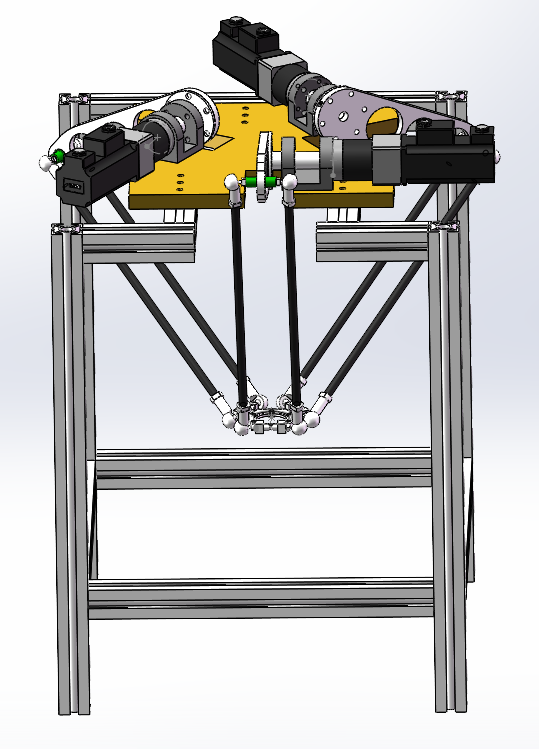
串联机器人、仿生机器人、四足机器人、仿生机器人、并联机器人
成功案例:
串联机器人、仿生机器人、四足机器人、仿生机器人、并联机器人
服务流程: