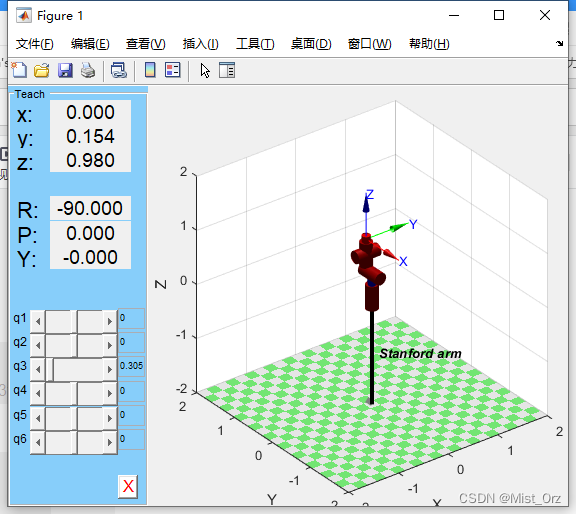
机器人运动学仿真:Matlab/Simulink机器人工具箱
¥100起
- 付费答疑 ; 其他服务 ; 仿真分析 ; 二次开发
- 5分(暂无评价)
简介
评价
服务描述:
可为刚刚接触Matlab机器人工具箱的用户提供以下服务:
1、机器人运动学
正运动学
逆运动学
雅克比矩阵
带有移动关节的机器人
建立自己的移动关节机器人模型
蒙特卡罗法的工作域分析
2、机器人动力学
查看模型动力学参数
逆动力学
动力学方程
重力载荷
关节空间惯性矩阵
科氏力和向心力耦合矩阵
计算有效载荷
正向动力学
赋予机器人动力学参数
擅长领域:
Matlab/Robotics Toolbox
成功案例:
码垛、搬运、物流机器人
无人超市机器人分拣
双臂+视觉分拣
基于机器视觉的分拣机器人
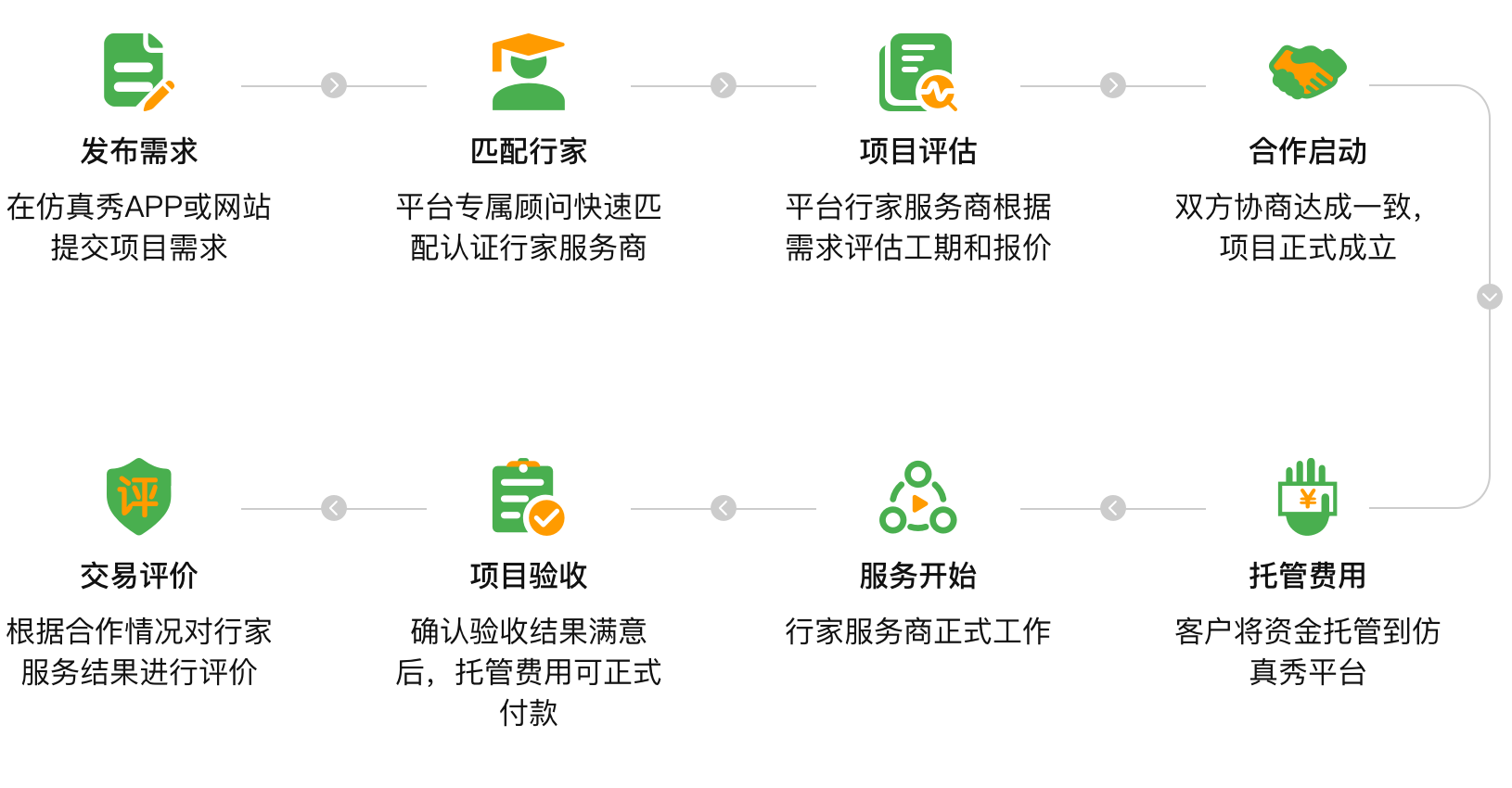
服务流程: