



磁控软体机器人一体化解决方案
¥30000起
- 其他服务
- 5分(暂无评价)
简介
评价
服务描述:
软体机器人是一种新型柔软机器人,能够适应各种非结构化环境,与人
类的交互也更安全,软体机器人的驱动方式主要取决于所使用的智能材料。
科学家依此设计了各种各样的软体机器人,大多数软体机器人的设计是模仿
自然界各种生物,如蚯蚓、章鱼、水母等。科学家曾预言,新型智能材料的
研制及其在在软体机器人的大规模应用将导致科学发展的重大革命。磁控智
能材料具有高效、精确 和安全等特点,使其迅速成为软体机器人研究的热点
和前沿。研究团队前期制作出多种自主控制驱动和外场控制驱动的磁控软体
机人。其中包括国内外首个利用磁性流体流动实现变形运动的仿蚯蚓软体机
器人与利用智能材料特性实现变形 运动的仿阿米巴虫机器人。为自主设计
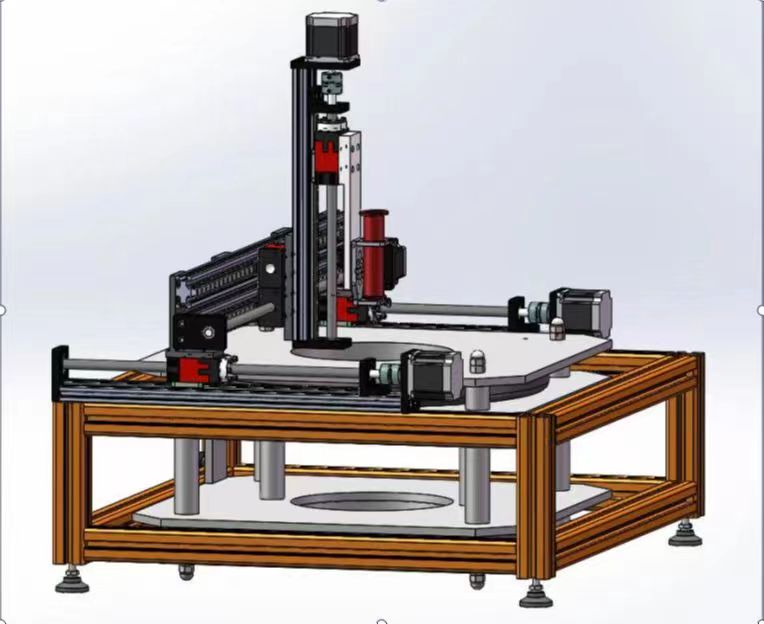
并搭建了模块化、多功能、易操作的软体机器人制作平台与磁场驱动平台。可
以通过预先对机器人内部磁畴和流变特性编程与打印中参数调整对 软体机器
人磁控性能进行精确调控;磁场驱动平台集成亥姆霍兹线圈、梯度电磁铁线
圈和阵列式磁场线圈三种磁场发生单元,可以使软体机器人内智能材料产生
整体或局部流动。
擅长领域:
软体机器人
研究领域为在磁性软材料流变特性及测量的基础理论、软材料 3D 打印及 4D 打印、磁控软体机器人等
成功案例:
多家大中小学采用本平台科研教学
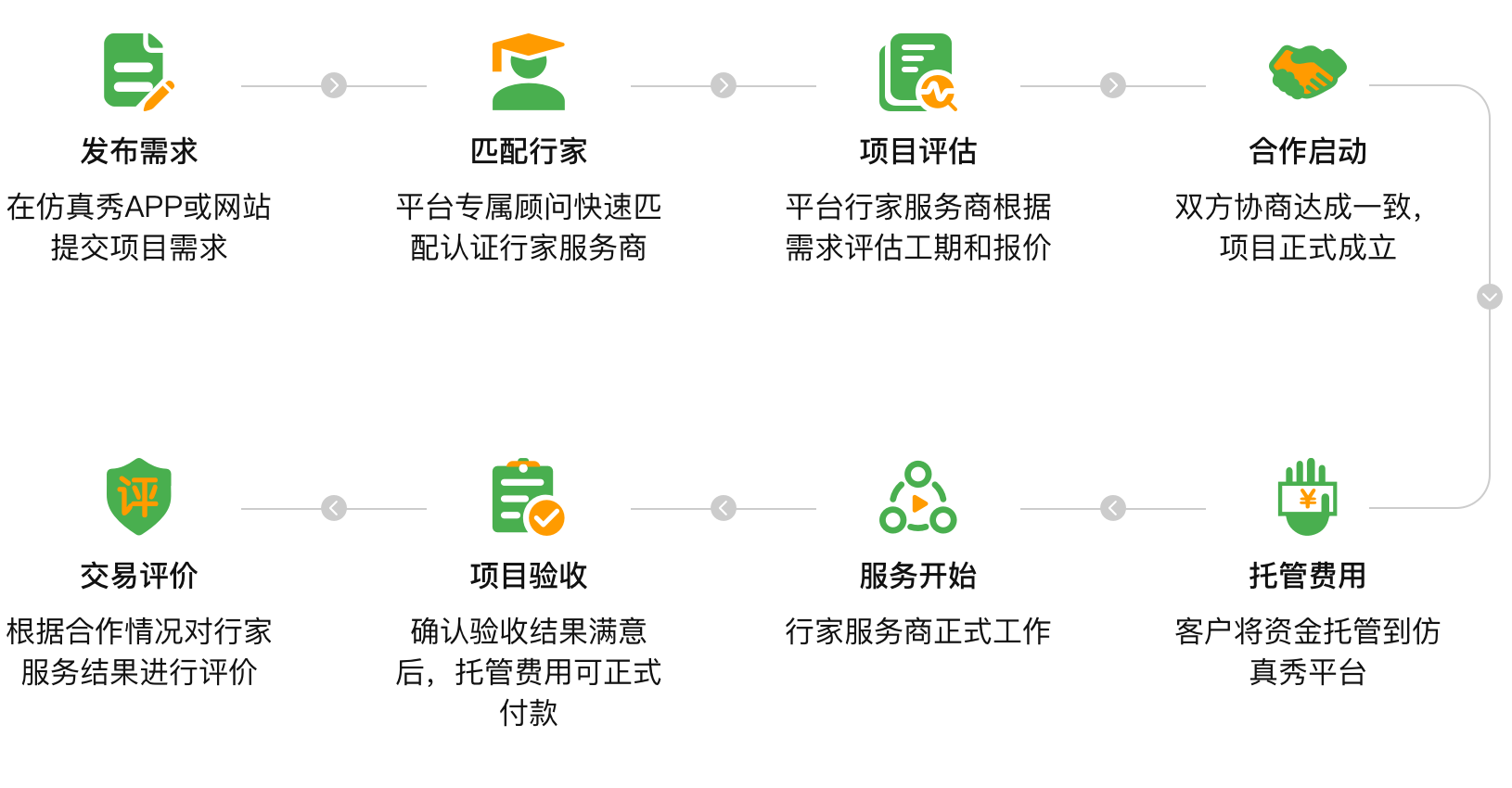
服务流程: