
机器人运动学与动力学仿真:CoppeliaSim(Vrep)机器人仿真,Matlab/Simulink机器人仿真
¥300~1000
- 付费答疑 ; 仿真分析 ; 其他服务
- 5分(1人评价)
简介
评价
服务描述:
本人机电一体化专业本科,双控专业博士,从事手术机器人相关算法与仿真研究,精通机器人学以及工业/协作机器人相关的仿真与算法开发
可为企业提供以下服务:
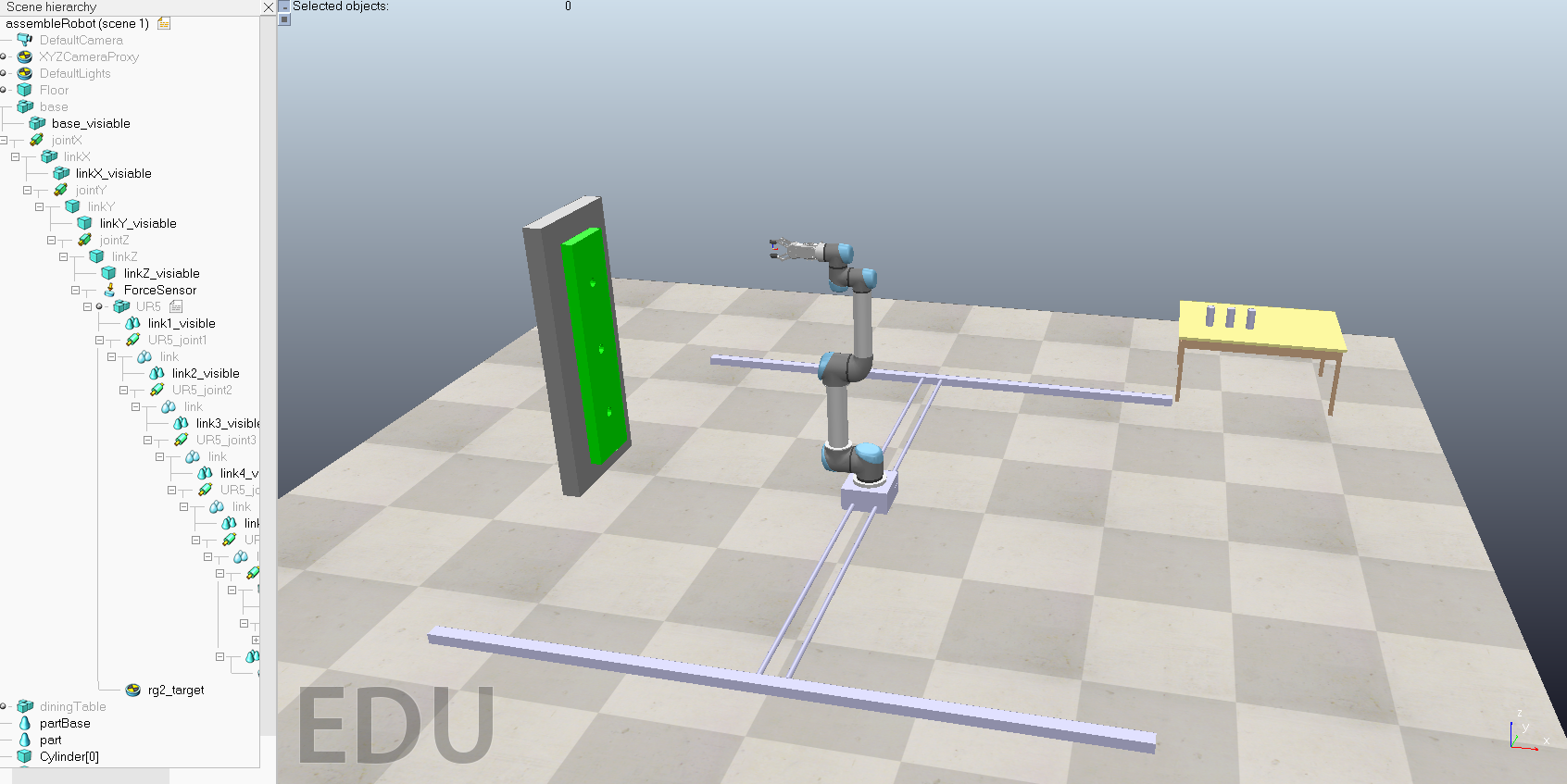
1:CoppeliaSim软件基础培训、从0开始进行机械臂的建模(3D模型导入、关节添加、运动学约束,lua脚本撰写,模型的打包)
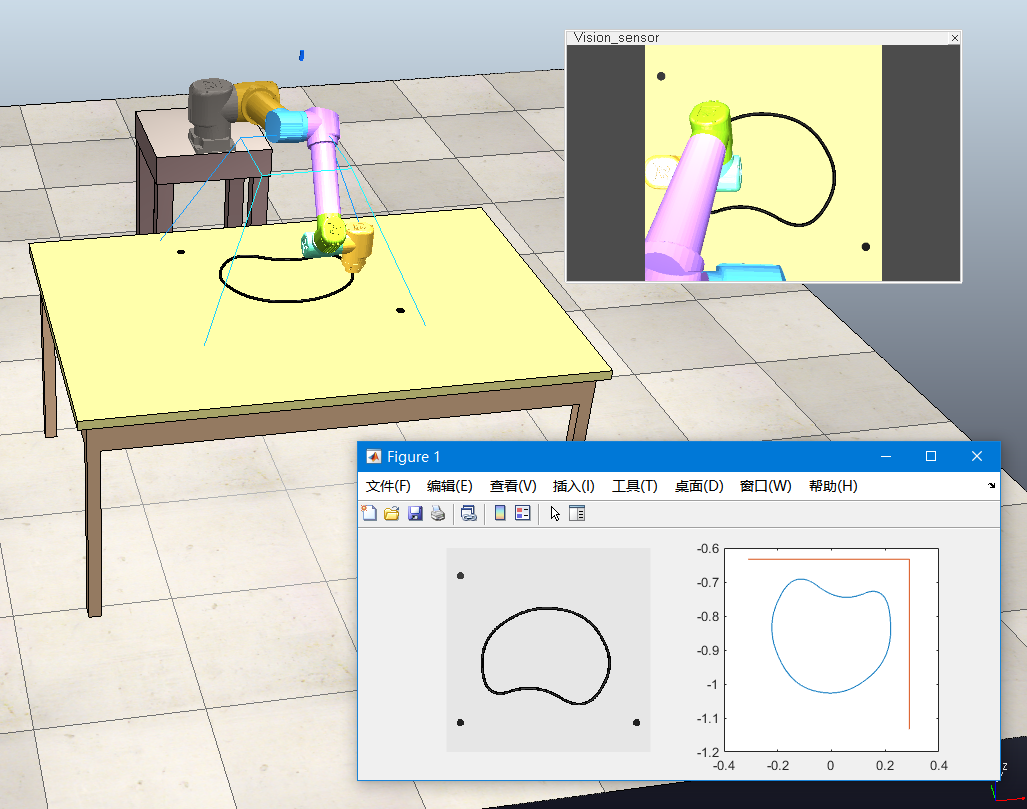
2:CoppeliaSim与Matlab/Python的联合仿真;可通过matlab或者Python设计算法,通过接口控制Copperliasim中的模型,进行结果的可视化
3:机器人学基础教学
3:基于Matlab机器人工具箱(Peter Corke开发那个)的机器人建模、分析、仿真
4:基于simulink的multibody工具箱的机器人可视化仿真(multibody与simulink结合紧密,方便算法设计与验证)
擅长领域:
CoppeliaSim/Vrep;Matlab;Simulink/Multibody;Solidworks;Python
成功案例:
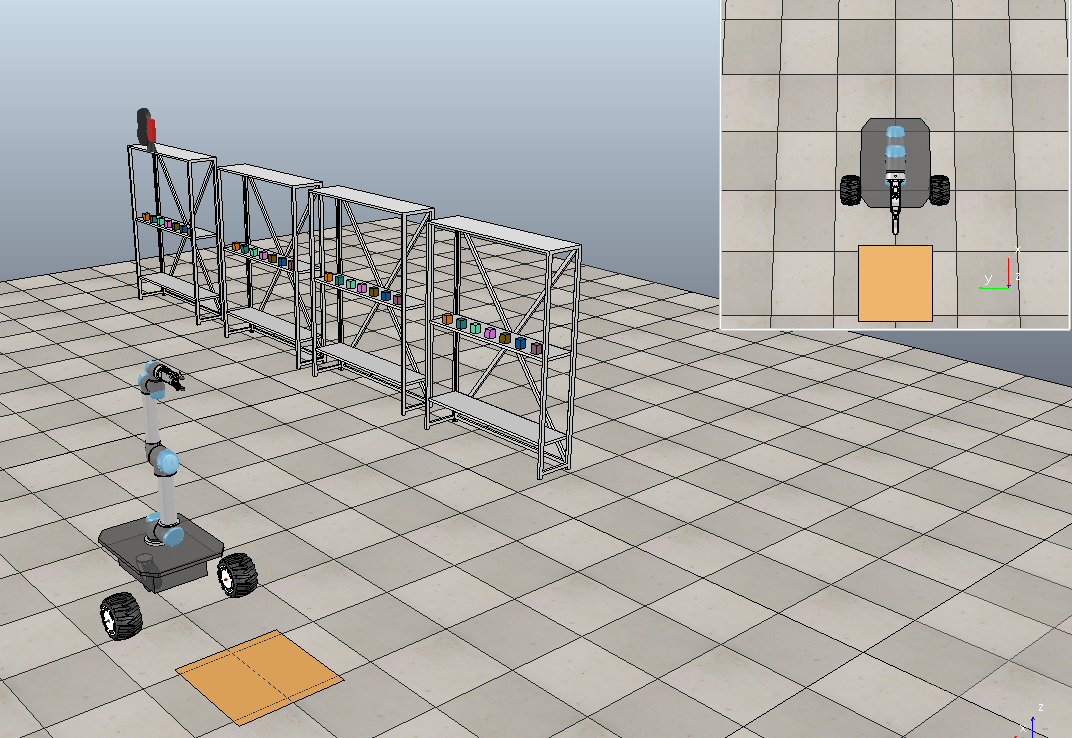
码垛、搬运
无人超市
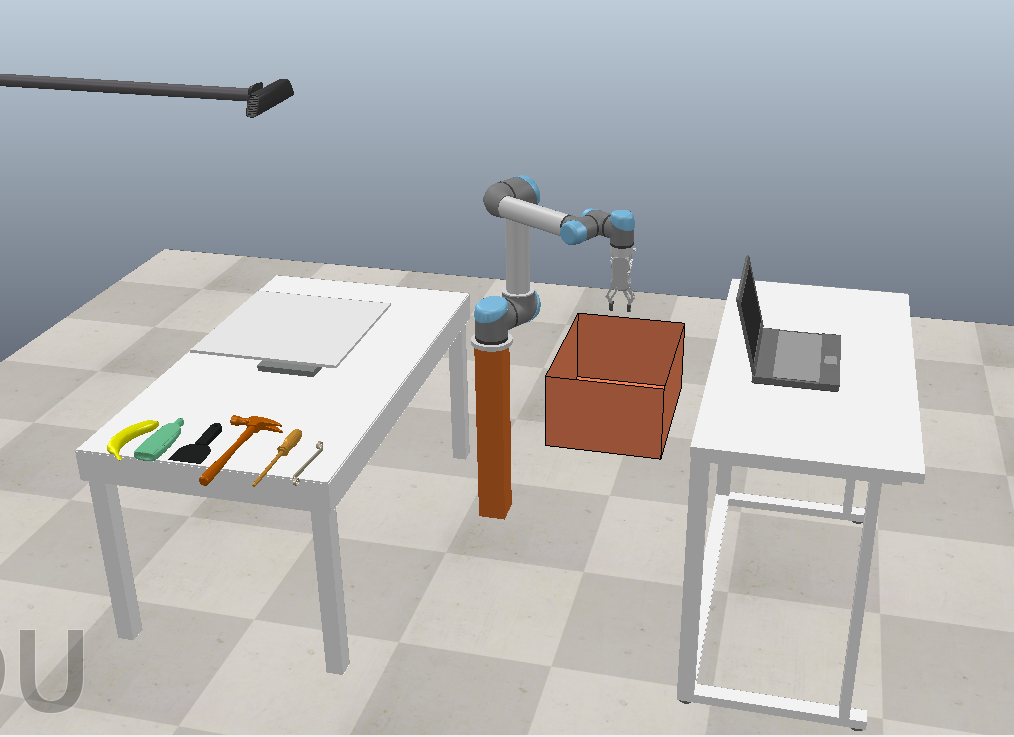
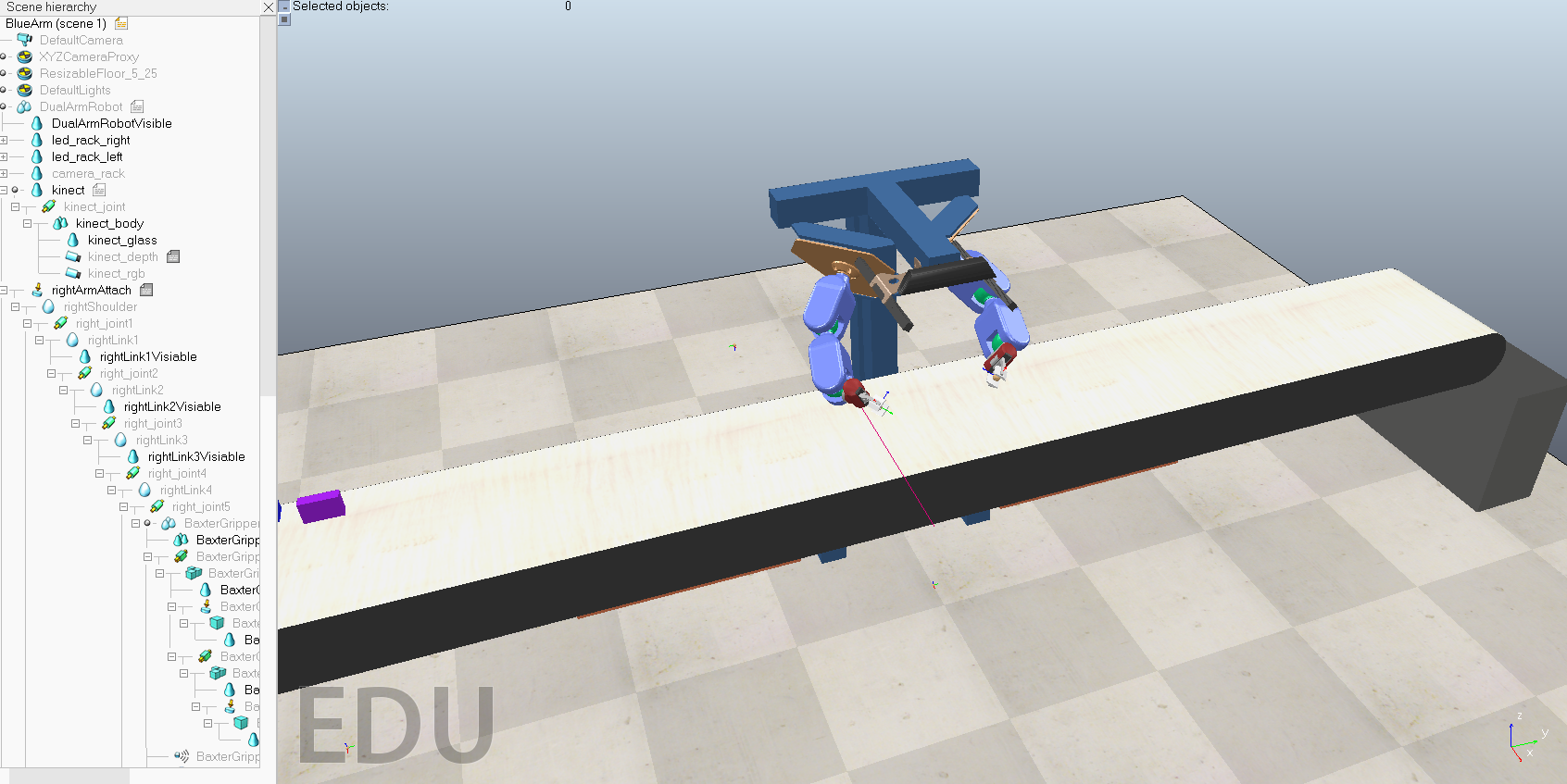
双臂+视觉分拣
基于机器视觉的分拣机器人
....
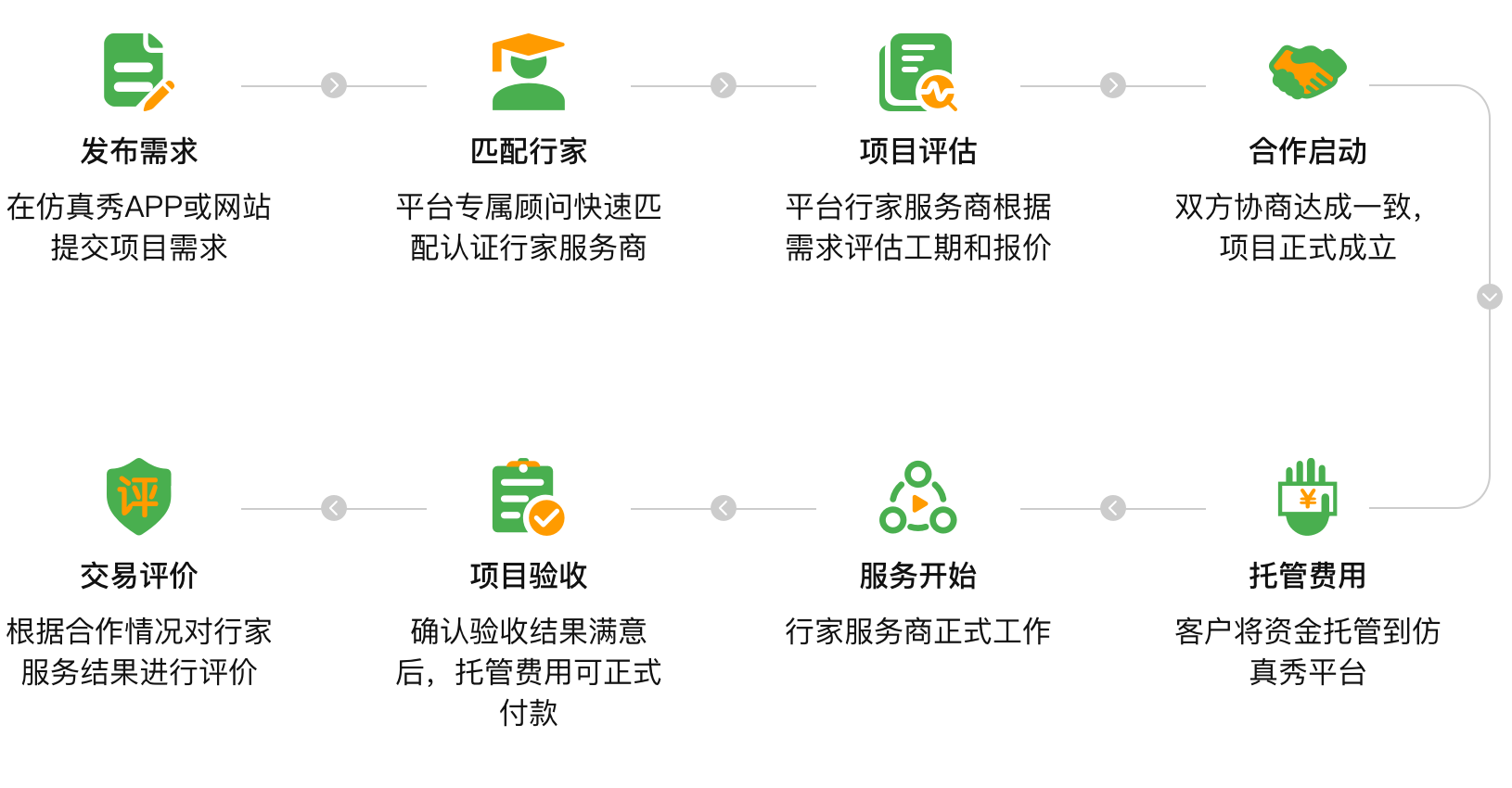
服务流程: