电机径向力相位对振动噪声的影响——【电驱动系统NVH系列专题(六)】

本文摘要:(由ai生成)
本文研究了电机径向力相位对振动噪声的影响,特别是在三合一或多合一电驱动系统中。通过仿真对比了不同斜极形式的影响,并深入分析了电磁力幅值、相位和声功率。研究发现,径向力相位差对零阶模态共振有显著影响,实际状态与理论值存在明显偏离。文章强调在振动优化时,需综合考虑径向力幅值和相位的影响,并建立合理的目标函数来降噪。懿朵科技提供全方位的NVH解决方案。
电机径向力相位对振动噪声的影响
方江龙 唐旭
对于三合一或多合一电驱动系统,其常见NVH问题包括两类:低速区由切向激励激发总成弯扭模态引起的弯扭振动;高速区由零阶径向激励与圆柱零阶模态共振引起的径向振动并辐射高频噪声。现有研究表明,转子分段斜极对抑制齿谐波电势、各阶次谐波以及齿槽转矩均有明显作用,因而对改善低速区扭矩问题有显著效果。与此同时,宝马工程师研究对比了不同斜极形式下,零阶激励与结构零阶模态共振峰位置及幅值影响。揭示了径向力相位对零阶共振的影响。在该研究中认为,转子分段后不同段之间磁势的相位差满足如下关系:

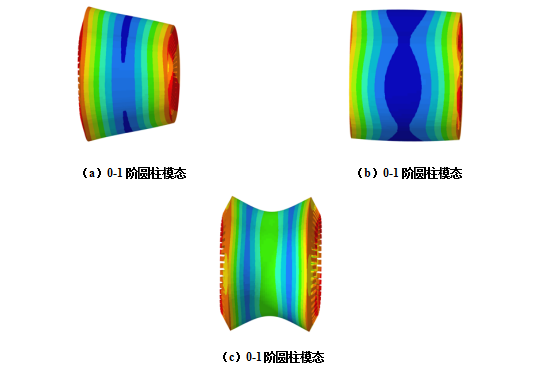
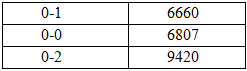
1.零阶结构模态
1.零阶结构模态
2.理想状态下电磁力幅值及相位
2.理想状态下电磁力幅值及相位
2.1 不同斜极形式下电磁力幅值与相位
在无斜极时,认为电磁力在轴向不同截面处相同; 线性斜极(连续斜极)时,斜极角度3.75°,电磁力在轴向不同截面处径向电磁力幅值相同,48阶径向力相位从铁心一端到另一端线性增大180°; V型斜极(4段),第一段与第二段转子角度相差3.75度;48阶电磁力在两段转子上幅值相同,相位阶跃180°; ZigZag斜极(6段),各段转子初始角度为1.875-4.375-6.875-3.125-5.625-0.625,48阶径向电磁力在各段上幅值相同,转子各段上径向力相位与第一段的相位差为:143°,286°,71°,214°,-71°。





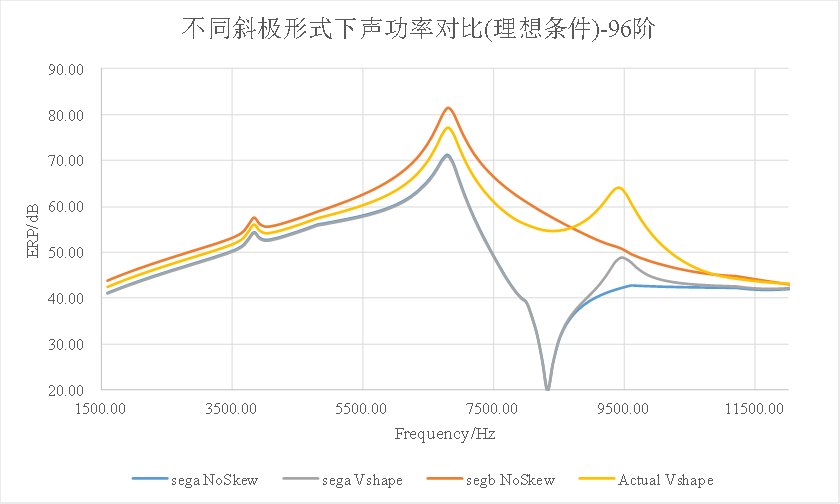
2.2不同斜极下48阶等效声功率
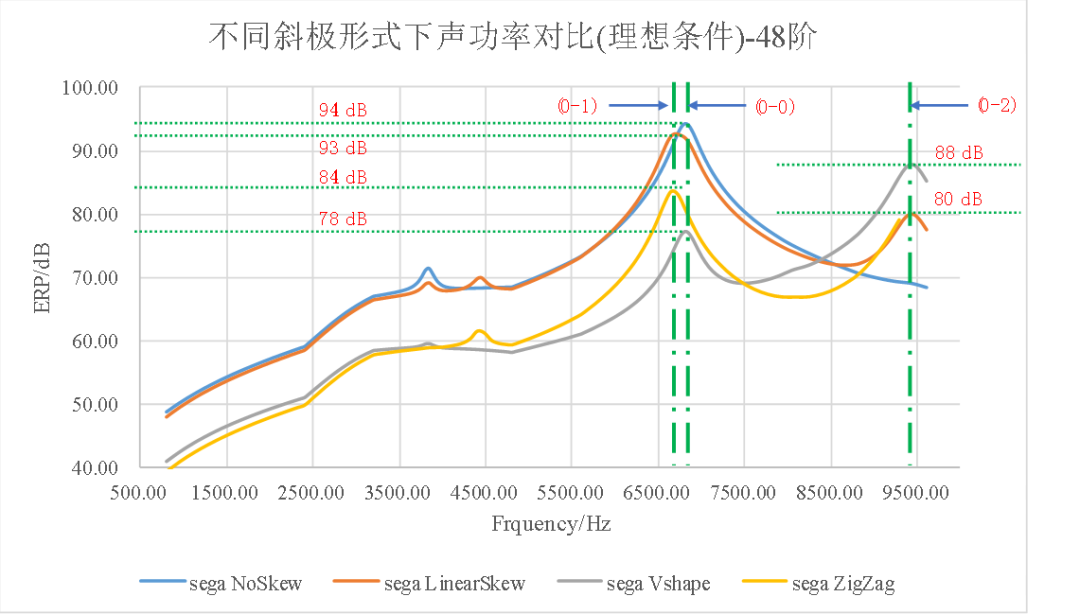
无斜极时,圆柱(0,0)阶模态被激发,声功率峰值94db;圆柱(0,1)及(0,2)阶模态处无显著峰值; 线性斜极时,圆柱(0,1)及(0,2)阶模态被激发,其中(0,1)阶模态处峰值与无斜极(0,0)阶模态处峰值接近,(0,1)阶模态处声功率峰值80db; V行斜极时,圆柱(0,0)及(0,2)及模态被激发,其中(0,2)阶模态处声功率幅值88db,大于(0,0)阶模态处峰值78db;两个共振峰处峰值高度均低于无斜极及线性斜极; ZigZag斜极时,圆柱(0,1)及(0,2)阶模态被激发,其中(0,1)阶模态处峰值高度84db,(0,2)阶模态处峰值高度80db; 两个共振峰处峰值高度均低于无斜极及线性斜极。

3.实际激励下不同斜极形式电磁力幅值、相位及声功率
3.实际激励下不同斜极形式电磁力幅值、相位及声功率
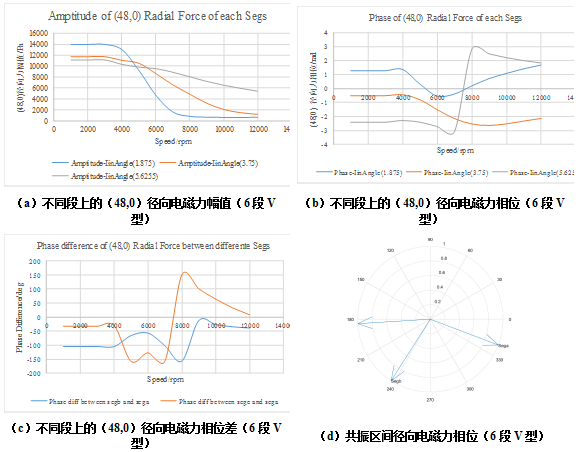
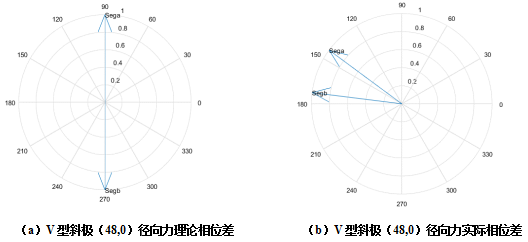
3.1 不同斜极形式下不同段上径向电磁力幅值及相位对比


4.迭代过程中不同段上径向力幅值及相位的变化
4.迭代过程中不同段上径向力幅值及相位的变化




5.总结
5.总结
来源:懿朵科技
登录后免费查看全文
著作权归作者所有,欢迎分享,未经许可,不得转载
首次发布时间:2024-04-20
最近编辑:1年前

签名征集中


还没有评论
相关推荐
最新文章
热门文章
