数字孪生是当前故障诊断领域的研究热点,该论文是北京航空航天大学陶飞教授 ,非常经典,该论文系统的阐述数字孪生五维模型的原理框架 数字孪生驱动的PHM的方法 数字孪生和传统方法的差异
截至目前该论文在谷歌学术上显示被引用 733 次,想必是 入门必备 的经典文章之一, 非常值得阅读 !
论文基本信息 论文题目 :Digital twin driven prognostics and health management for complex equipment
论文期刊 :CIRP Annals - Manufacturing Technology
Doi :https://doi.org/10.1016/j.cirp.2018.04.055
作者 :Fei Tao , Meng Zhang , Yushan Liu , A.Y.C. Nee
机构 :
a School of Automation Science and Electrical Engineering, Beihang University, Beijing 100191, PR China
b Department of Mechanical Engineering, National University of Singapore, Singapore 117576, Singapore
第一作者简介: 陶飞
摘要 故障诊断和健康管理 (Prognostics and Health Management,PHM)技术 在产品的生命周期监控中至关重要,尤其是对于在恶劣环境中工作的复杂设备。为了提高PHM的准确性和效率,针对复杂设备提出了数字孪生(Digital twin, DT)这一实现物理-虚拟融合的新兴技术。首先构建了 复杂设备的通用数字孪生体 提出了 基于数字孪生驱动的PHM的新方法
目录 4.1 问题描述
4.2 对提出的 DT驱动 PHM方法验证
4.3.性能比较与分析
1 引言 飞机、轮船、风力涡轮机等复杂设备设计用于在恶劣环境中工作数十年。因此,在其运行过程中性能下降是不可避免的,这可能导致故障,从而导致高昂的维护成本。故障诊断和健康管理(PHM)的引入,能够实现复杂设备的可靠运行。它用于监测设备状态,进行故障诊断,并提供维护设计规则[1]。
然而,目前关于PHM的大多数工作主要是由其物理空间中的设备驱动的,与其虚拟模型几乎没有联系。当前,随着信息物理系统(Cyber Physical Systems,CPS)的发展,重视实现物理空间与虚拟空间的无缝融合、提高复杂设备的PHM显得至关重要。在这种情况下,在虚拟空间中,引入了设备及其数据的数字镜像来描述真实实体的行为。参考文献[2]中已经探索了一些潜在的应用,但是,实现由物理和虚拟空间驱动的PHM,仍然存在一些突出的常见问题
建立设备与其数字镜像之间的交互,使其无缝支持PHM; 融合物理空间和虚拟空间的数据,为PHM生成准确的信息。 本文 针对上述3个问题 首先 其次 第三
本文首先建立了 五维DT 提出了 PHM新方法 介绍了 案例
2 五维模型 DT模型的通用架构及标准首先由Grieves[3]构建 物理实体 虚拟模型 连接
基于此 该文提出一种扩展的五维架构DT 增加DT数据和服务
根据提出的五维架构,图1显示了复杂设备的DT,可以用以下表达式表示:
图1 复杂设备的五维DT模型
其中
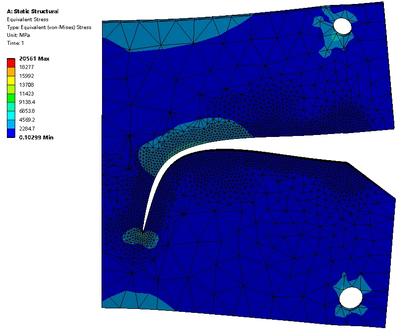
图 2 物理 WT 模型
其中 几何模型 物理模型 行为模型 规则模型 被构造为 3D 实体模型 模拟PE的物理特性 包括约束、关联和演绎的规则 。 这些规则就像“大脑”一样,让VE做出判断、评估、优化和/或预测。对于WT,可以通过力分析来模拟风速的约束,并且可以使用神经网络从云数据中挖掘参数的关联。通过构建的
以物理WT模型的功率输出监控服务为例。它可以表示为Ss_monitor=(功率输出监控,(风速,物理WT的功率输出,虚拟WT的功率输出),功率条件,(时间,成本,可靠性),(工作,空闲,故障))。
其中 图4 风力发动机的
其中 以 WT 的 3 DT驱动的PHM方法 用已建立的 DT (数字孪生体)来创建如图 5 所示 DT 驱动的 PHM 方法。在这种方法中,故障分为渐进性故障和突发故障。前者可以预测为由成分逐渐降解引起的。后者是不可预测的,并且由于干扰而突然发生。
图 5 的工作流程分为三个阶段,即观察(步骤1–3)、分析(步骤 4–6)和决策(步骤 7)。 第 1 步 DT 建模和校准 (1)通过基于最小二乘法[8]的参数调整来校准 第2步 模型仿真和交互 第 3 步 一致性判断 第 4 步 退化检测 第 5 步 不一致导致判断
第 6 步 故障原因的识别和预测 (1)渐进式故障:从步骤4开始,在完全故障之前,定位故障原因。它包括两个阶段。在训练阶段,从 (2)突发故障:从步骤5开始,首先定位与突发故障相关的组件。然后,通过比较 第 7 步 维护策略 根据图5所示的框架,方法中所需的功能(例如一致性判断、故障原因预测、校准)由相应的服务实现。来自工作流的数据存储在 4 案例研究 WT是一种将风能转化为电能的复杂设备。由于WT的设计寿命为数十年,其工作条件具有随机负载、变化扭矩和多尘环境的特点,因此大多数组件在运行过程中可能会失效[10]。但是,一直访问 WT 是不切实际的。第 2 节中为 WT 构建的 DT 能够使用第 3 节中的 DT 驱动的 PHM 方法来解决这个问题。 如图2所示,齿轮箱是WT中最容易发生故障的元件之一[11]。它的失效主要是由于逐渐退化造成的。本节以齿轮箱为例,对所提方法进行演示 根据第 3 节中的步骤 1 和 2,使用 WT 构建的 DT,开始仿真和交互。根据步骤 3,物理和虚拟 WT 中齿轮箱的状态表示为 和 。 和 和 则基于风轮、齿轮箱和发电机之间的传动关系在虚拟 WT 上进行模拟。根据式(7)计算 和 的偏差,根据经验将设置为6%。当满足 根据步骤4,振动由安装在变速箱上的加速度计收集。振动时间序列中每 1000 个样本的能量计算为 其中 是第 个样本的振幅。如果超过最大值,则变速箱已退化。相关符号列于表1中。 根据步骤6,故障原因(即齿轮磨损、疲劳或断裂)的预测过程如图6所示。从物理WT中的齿轮箱可以看出,不同故障原因的振动频率和能量不同,可以反映在图6(a)中振动频谱的 和 ,通过记录齿轮啮合数可以得到 。然后,利用学习速度快、泛化性能好的单隐层网络极限学习机(extreme learning machine, ELM)[12]构建了故障原因预测模型,如图6(c)所示,其输入分别为 、 和 。最后,根据输入和构建的模型,如图6所示,输出确定了故障原因。
根据步骤7,维修策略建议进行焊补。首先对虚拟WT中的变速箱进行焊接工艺以进行验证,然后对物理WT中的变速箱进行焊接工艺。所提出的方法不访问WT,同时预测故障原因和维护过程。 传统的齿轮箱故障原因预测方法通常使用物理WT中齿轮箱的振动信号(表示为 对于齿轮磨损 疲劳 断齿 DT方法的优点主要来自于它的结构。根据工作流程,在物理和虚拟WT中的齿轮箱一致的前提下,构建的DT可以融合振动和应力信号进行预测。它可以从物理和虚拟两个方面描述变速箱 5 总结和展望 本文提出了用于复杂设备的DT驱动PHM。以WT为例,首先提出并建立了五维DT。然后,介绍了DT驱动PHM的框架和工作流程,并进行了齿轮箱预后案例研究,以证实所提出的DT方法提高了预测精度。 考虑到DT的实施成本和复杂性,所提出的DT驱动的PHM方法对于监测工厂中的高价值和主要设备将很有用,并且必须有足够的数据进行DT建模。为了扩大PHM应用的规模,(需要解决的)挑战主要包括 (1)为具有不同特性和行为的复杂设备构建高保真数字镜像;
编辑:赵栓栓
校核:李正平、王畅、陈凯歌、曹希铭、董浩杰
该文资料搜集自网络