麦格纳革命性的BEV设计:实现最大性能和效率的最佳动力系统配置

文章摘要
本文讨论了汽车技术的进步,特别是电动驱动系统的发展。麦格纳的Energy & Motion Control软件平台通过模块化功能适应多种电子/电气架构,简化硬件复杂性,整合车辆运动和能量方面的管理。文章比较了几种电动全轮驱动(eAWD)拓扑结构,强调了电动机效率图对传动系统设计的影响,并探讨了如何通过调整电机的效率图来优化传动系统。
文中还讨论了不同电动机配置的效率和性能,包括ASM和PSM拓扑变体,以及通过互补驱动实现的效率提升。最后,文章指出软件集成可以减少传动系统硬件,提高效率和性能,展示了通过先进的扭矩管理实现的车辆运动控制,提供了可控性、安全性、成本、功能性和效率的最优组合。
导读
整体概括:这篇文章主要讨论了汽车技术的进步,特别是在电动驱动系统的发展方面。麦格纳的Energy & Motion Control是一个功能模块化的软件平台,可以适应多种电子/电气(E/E)架构,这将使硬件复杂性日益简化。此平台整合了所有的车辆运动方面和能量方面,后者包括基本高效的传动功能和优化的能量流,关于车辆和传动系的热控制,这只是几个例子。
总结:总的来说,通过软件集成,可以使电动驱动系统更加高效和性能更强,同时还能减少传动硬件的复杂性。
1. 引言
汽车技术的进步可以类比为从传统手机到智能手机的演变。在上世纪90年代,手机仅仅是一个无线电话,而现在它们已经成为高度集成的多功能工具。这一进步是通过将最少量的标准硬件与最大量的基于软件的系统集成相结合而实现的。
类似的情况也出现在汽车技术中,特别是随着电动驱动技术的进步成为高度集成系统的重要组成部分。麦格纳的能源与运动控制是一个功能模块化的软件平台,可以适应多种电气/电子架构,这些架构将在硬件复杂性方面越来越简化。它集成了所有车辆运动方面和能源方面的内容,后者包括基本高效的传动功能以及针对车辆和传动系统热控制的优化能量流,仅举几例。
本文比较了几种电动全轮驱动(eAWD)拓扑结构,包括由于后续软件集成的新方法而变得可能的拓扑结构。所比较的标准包括效率(能源)和性能(运动)。这还包括几种扭矩矢量解决方案对效率和性能的影响。最后,将展示软件集成系统甚至可以进一步减少传动系统硬件的情况。
2. 电动机效率图如何影响传动系统拓扑结构
在研究不同的电动全轮驱动拓扑结构之前,应该提到的是,电动机的效率和效率图与内燃机(ICE)的效率图完全不同。这会对电动机如何集成到传动系统中产生重大影响。稍后将会展示,电动机的互补布局可以帮助进一步提高效率。
麦格纳公司研究了六种功率从105到250千瓦不等的驱动器。所有驱动器使用了可比较的800伏架构和碳化硅(SiC)逆变器。针对给定车辆的WLTC进行了这六种驱动器的驱动循环仿真。
对这六种驱动器的比较得出了图1所示的结果:逆变器损耗在所有变体中基本保持不变。数据显示传动损耗略有不同。换句话说,随着驱动器可用最大扭矩的增加,损耗稍微增加,但另一方面,更强大的电机允许具有更长比例的传动装置,从而降低损耗。
然而,特别值得注意的是,随着电机功率的增加,WLTC中的电动驱动器显示出更低的电机损耗。这是因为它们可以在更高效的地图范围内运行来处理负载。概括地说,许多电动机的最佳负载点约在30%左右,而内燃机通常在70%左右有最佳效果。这显然是一个刻意简化的表述,实际上都要取决于具体的电机设计[1]。

电驱动不需要像内燃机那样进行负载点提升。相反,目标是使低负载效率的最佳点与WLTC和实际交通情况(如高速公路驾驶)中的典型工作点相一致。
3. 调整电机的效率图
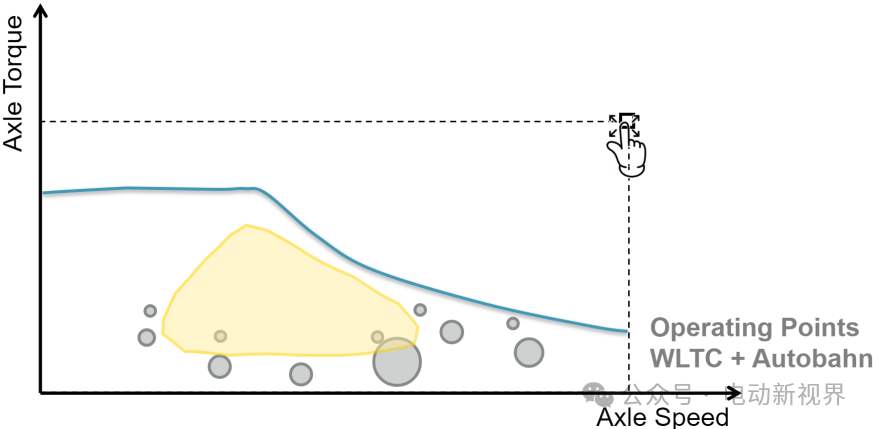
如何做到这一点呢?为了说明这一点,我们通过电机驱动轴速度和轴扭矩来描述电动驱动器的效率优化运行范围和相关运行点。相关操作点来自WLTC,此外还包括高速公路驾驶,因为这可能包括更高的速度,特别是在德国。
图2显示了基本关系:电动驱动器输出扭矩沿y轴绘制,输出速度沿x轴绘制。蓝色线表示峰值扭矩曲线,包括角点,该角点定义了最大扭矩和功率。黄色 区域显示了电机效率至少为92%的区域。灰色圆圈表示WLTC和高速公路驾驶中的典型操作点,其直径表示使用频率。重要的是要注意,在更高速度和更高扭矩下的操作点特别重要,因为它们会导致损失增加。

图2中的图表展示了一个功率输出相当低的电动机。如图所示,操作点大多不符合有益的效率范围。不幸的是,这尤其适用于在高速度和频繁使用(因此对能源消耗影响较大)时的操作点。因此,我们的目标是使最佳工作区域向这些点移动。
如果现在通过增加扭矩来增加功率,同时保持电机速度不变,则最佳点会远离所接近的负载点。另一方面,如果通过适度增加扭矩和增加电机速度来增加功率,则最佳点将包括更多的操作点,特别是在更高速度下。如果只通过速度增加来增加功率,则可以实现更好的覆盖,使得最佳点包括更多的操作点,如图3所示。
一般来说,这里可以看出,更强大的电机可以实现更大的高效区域,从而更好地覆盖操作点。增加扭矩和/或速度来提高功率的最佳程度需要具体查看车辆应用和可用的电动机。在扭矩和速度之间总是存在特定的权衡。
有趣的是,在现实世界的电动机中也展示出这一点,当功率增加时,由于组件效应,峰值效率继续提高。为更高功率输出的电动机设计包含更多的铜和磁铁材料。这导致在部分负载范围内损失减少,如图4所示。即使由于更大的扭矩而导致功率增加,也可以在循环和高速公路上捕捉到重要的操作点。

4. ASM和PSM拓扑变体
在扩展BEV的范围时,需要更多的电动功率,因为电池增加了重量。将这种功率分配到两个轴上是有意义的,尤其是这将提高牵引力和驾驶动力学。然而,如下所示,通过智能地“互补”使用四驱系统的主要和次要部分,甚至可以实现比两驱车辆更高的效率。图5显示了所有研究的驱动配置的考虑。这些架构从两驱到非优化的四驱解决方案,再到通过解耦系统进一步优化的解决方案,最后到互补的驱动设计。
首先,在左侧显示了一个120和176 kW的2WD驱动。第一列中的上述驱动具有SiC变流器,使动力传动效率提高了约2%。可以在第二列中看到,与“传统”思维相反,更强大的驱动提供了更高的效率。
接下来,仅显示了四驱架构。显而易见的是,前后轴上各有两个PSM的配置损失增加了。这是因为PSM(永磁同步电动机)无法被停用,并导致永久性的电气损失。由于两个电动机必须永久一起工作,并且由于没有解耦选项,操作策略受到限制。

因此,近年来出现了一种更高效的变体,其中次级轴采用ASM(主动分离模块)操作,而初级轴则采用PSM(动力分离模块)操作。ASM可以电隔离。麦格纳动力总成的ASM次级驱动通过实施一种先进的轴承概念,优化了最小拖曳损失,从而在待机操作期间实现了低机械损耗。然而,很明显,AWD系统的效率可以与2WD系统相媲美。在这里,ASM仅用作助推轴;PSM主驱动可以在低负载情况下设计为最佳效率。
5.添加机械解耦
另一种选择是在次级轴上使用带有机械解耦装置的PSM代替ASM。在麦格纳解耦系统中,爪形离合器允许PSM几乎无损失地解耦。切换时间非常短,以至于系统可以透明地集成到操作策略中,而没有任何功能上的劣势[2]。
此外,麦格纳还研究了以下AWD架构的辅助驱动:双EM轴使用两个电动机,其功率相加,同样也使用了两个解耦元件。这种设计允许横向扭矩矢量和无损解耦。然而,与单个电机和下游扭矩矢量元件相比,可用于扭矩矢量的扭矩较低。
相反,麦格纳动力总成的双扭矩矢量驱动仅使用一个电动机,但具有两个湿式离合器用于横向扭矩分配。离合器的(通常)打开状态在功能上对应于上述的解耦功能。由于增加了气隙和油排出,离合器系统的拖拽损失最小。与有两个电机的变体相比,这种解决方案的优势在于可以完全转移单个电机的扭矩。此外,它的成本效益相对较高。
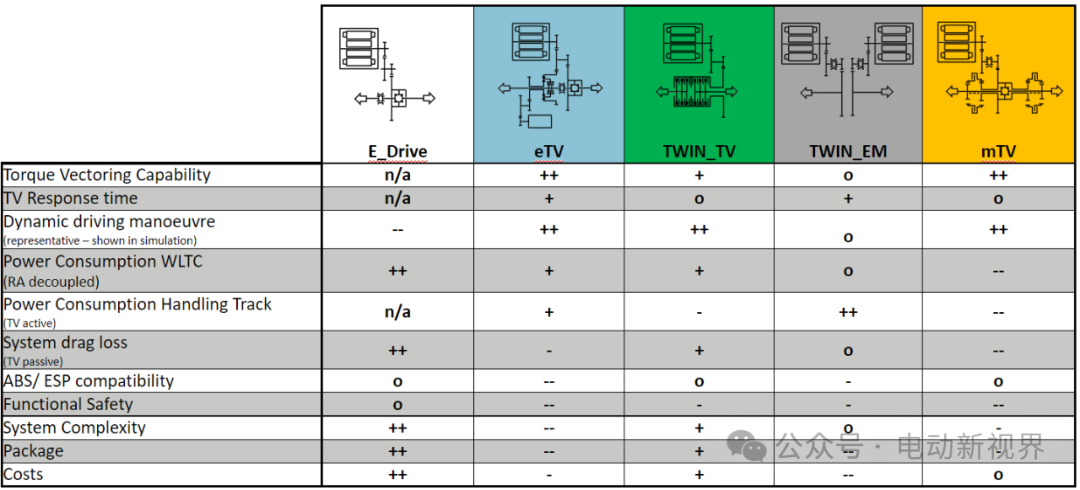
这些变体都有各自的功能优势,如图6所示,它们都以不同的方式实现了第二驱动的解耦。
6.通过互补驱动的益处
在比较上述的AWD(全轮驱动)变体时,可以注意到它们在效率上都与优化的2WD(两驱)非常接近。这证实了这样一个假设:AWD是更可取的,因为它带来了额外的功能性好处。然而,到目前为止,这种效果主要还是由更高的功率输出和由此产生的负载减少所主导。
互补驱动将实现进一步的效率提升。该概念包括集成两个不同的电动驱动器,每个都具有独特的优势或优化领域,以实现全面和更优的解决方案。实现互补驱动概念的一种方法是将前轴与长传动比以及可断开的后轴相结合。前轴的传动比经过精心选择,以覆盖相关高速公路运行条件下的效率优化范围。图7。实际上这意味着要利用较长的比率,同时仍然保持对效率图的最佳覆盖。
前轴的解耦主要负责恒定的高速公路驾驶。在较低速度范围内的动态驾驶是通过两个车轴来执行的,以保持两个电动机上的低负载点。这些电动机是专门针对这些运行点进行优化的,以充分挖掘效率潜力。
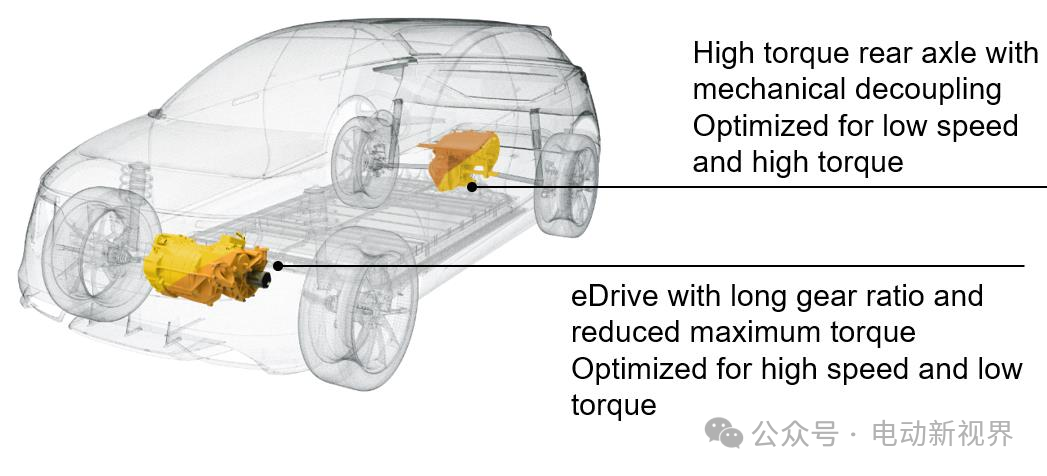
前轴产生的降低的轮扭矩通过第二个驱动来补偿,当加速时(假设次要驱动位于后轴),该驱动在轮扭矩和牵引力方面占主导地位。节省是在与消耗相关的操作阶段中实现的,即在通常与更长距离行驶相关的恒定速度下。
总体而言,在补充设计中考虑的三个全轮驱动(AWD)变体在效率上比两驱(2WD)驱动高出2-3%。哪个变体更可取取决于功能要求和具体的设计,必须具体确定。
7. 进一步软件系统集成以减少硬件复杂性
如文章开头所述,通过软件实现系统集成是提高效率和可控性的关键。提供横向扭矩矢量系统以改善车辆横向动态可以通过多种方式实现:使用两个电机、叠加电机或双离合器系统。所有这些解决方案都有特定的优势,但会增加机械复杂性和成本,并且可能会在某种程度上降低效率,正如上面所描述的。
最简单但有些受限的扭矩矢量功能是将扭矩在前后驱动之间转移,以间接影响车辆的偏航。然而,麦格纳车辆运动控制现在提供了一种新的方法,将电动机和制动器集成到一个控制系统中[3]。换句话说:基于驾驶员的需求和基于车辆传感器的偏航控制系统,这个集成的电动机和制动器控制将在每个车轮上施加正负扭矩。这是通过优先级电动机或必要时通过制动器来完成的,如图8所示。
由于在软件层面的功能集成,车辆的操控性接近机械扭矩矢量解决方案,但硬件最少。结合互补布局,该系统提供了可控性、安全性、成本、功能性和效率的最佳组合。

乔格·金德勒博士,麦格纳动力总成公司高级业务拓展与转型总监,德国乌特格尔普恩巴赫市。


