域泛化 2024年 Reliability Engineering & System Safety 期刊的综述 ,并提供有该作者 的开源代码 ,因此这篇开源代码适合参考借鉴并在上面进行改进学习,适合具备一定的深度学习基础知识的学习者, 非常值得阅读学习 ! 1 论文基本信息 论文题目 :Domain generalization for cross-domain fault diagnosis: An application-oriented perspective and a benchmark study 论文期刊 :Reliability Engineering & System Safety
论文时间 :2024年
作者 :Chao Zhao a,c, Enrico Zio b,c, Weiming Shen a,*
a State Key Laboratory of Digital Manufacturing Equipment and Technology, Huazhong University of Science & Technology, Wuhan 430074, China
b MINES Paris PSL University, CRC, Sophia Antipolis, France
c Energy Department, Politecnico di Milano, Milan, Italy
2 摘要 大多数数据驱动的故障诊断方法依赖于训练和测试数据独立且相同分布的假设。然而,训练阶段和测试阶段之间的域偏移在实践中很常见。近年来,基于域泛化的故障诊断技术(domain generalization based fault diagnosis, DGFD )以学习多源域的故障诊断知识并将其应用到未知的目标域而受到广泛关注。本文从应用的角度综述了DGFD 的研究进展。首先,阐述了DGFD 的基本定义及其各种应用。然后,讨论了不同应用的动机、目标、挑战和最新的解决方案。强调了现有技术的局限性。对8个开源数据集和2个自采集数据集进行了全面的基准研究,为研究人员提供了对现有方法的理解和统一的框架。最后,提出了今后的发展方向。
关键字 :故障诊断,域偏移,域泛化,深度学习
3 目录 6.1 一般流程
6.2 基于同构域泛化的故障诊断(HDGFD)
6.3 基于联邦域泛化的故障诊断(FedDGFD)
6.4 基于半监督域泛化的故障诊断(SemiDGFD)
6.5 基于开集域泛化的故障诊断(OSDGFD)
6.6 基于不平衡域泛化的故障诊断(IDGFD)
6.7 基于单域泛化的故障诊断(SDGFD)
注:本文只选中原论文部分进行分享,若想拜读,请下载原论文进行细读。 4 引言 注:引言前面只翻译了部分,图1和图2展示了传统深度学习、域适应、域泛化之间的区别,如果能够看图来理解三者之间的区别,说明对域适应和域泛化概念理解已经入门了,那样后续论文阅读也会更容易理解的。
图1 (a)传统的数据驱动故障诊断和 (b)跨域智能故障诊断示意图。符号内的值表示每个样本的类标签
图2 跨域故障诊断中的两种学习范式。(a) DAFD 。(b) DGFD。符号内的值表示每个样本的类标签,没有数字的符号表示未标记的样本。
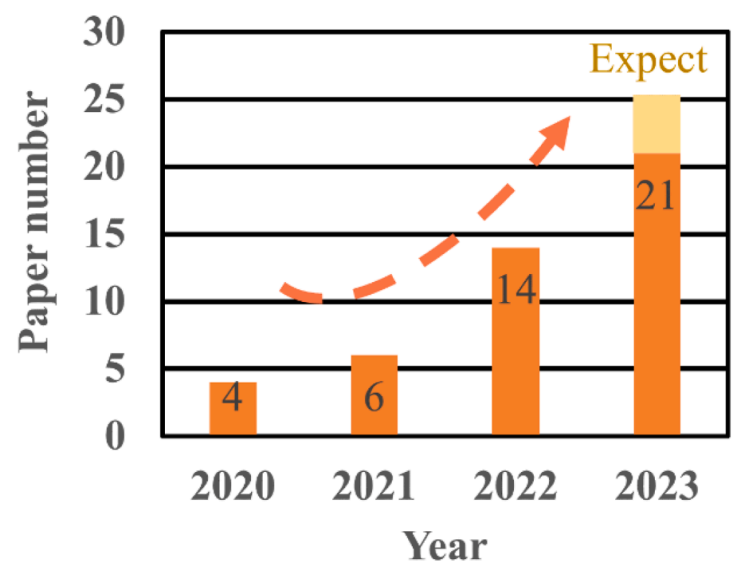
图3 近年有关 DGFD 的刊物数目(截至2023年11月)
自2019年以来,已经发表了几篇关于跨域故障诊断(cross-domain fault diagnosis, CDFD )的综述论文。Zheng 等[13]主要从学习策略的角度对CDFD 的研究进行了概述。同时,Yan 等[37]发表了一篇综述,讨论了四个具体应用的知识转移。Li 等[38]专门对机械故障诊断中的深度迁移学习进行了系统综述。Zhao 等人[39]进行了一项基准研究,评估了典型的无监督深度迁移学习方法的性能。Li等人最近的一篇综述[40]详细介绍了深度迁移学习在CDFD 中的主要应用。然而,值得注意的是,上述调查论文主要关注域适应故障诊断 (Domain adaptation-based fault diagnosis, DAFD )方法,而不是DGFD 方法。需要一个对DGFD 进行全面的综述,为未来的研究和应用提供有价值的研究见解。 为了弥补这一研究空白,本文概述了智能故障诊断的域泛化,特别关注了公式、算法和应用。在8个开源数据集和2个自采集数据集上进行基准研究 DGFD 方法在跨工况和跨设备诊断任务下的性能。本工作的目的是为研究人员和从业人员提供一个全面和深入的综述,并促进这一领域和相关领域的进一步研究和进步。 提出了 DGFD 的分类方法 提供了 DGFD 的代码框架 DGFD 方法进行智能故障诊断,选择了8个开源数据集,并发布了2个自采集数据集 第2部分定义了术语,提出了面向应用的故障智能诊断领域泛化分类方法,并介绍了相关研究领域; 第3节解释了不同应用的动机,并介绍了相应的解决方案; 第4节提供了一个可用的开源数据集列表,并提出了一个基准研究; 5 背景 首先介绍了一些基本的符号和定义,然后介绍了DGFD 中不同模式的公式。并对相关研究领域进行了讨论。
5.1 基本定义
本小节概述了论文中使用的必要定义和注释。表1列出了最常用的符号。
定义1 :(域 )设 定义2 :(域偏移 )。给定源域 标签空间是相同的 联合分布是不同的 , 定义3 :(域泛化 )。给定个源域 定义4 :(跨域故障诊断 )。训练数据集 5.2 域泛化在跨域故障诊断中的应用定义
许多具体问题在工业场境中引起了极大的兴趣,并为解决这些问题作出了重大努力。对于研究人员和工程师来说,理解与CDFD 相关的问题并设计出可行的解决方案是至关重要的。从实际工业应用的角度出发,我们在图5中对该话题进行了总结,并识别了DGFD 的不同模式。基于同构域泛化的故障诊断是故障诊断的基础问题,其他问题则是基于特定问题的故障诊断的变体。
图5 面向应用的基于域泛化的故障诊断分类方法
定义5 。(基于同构域泛化的故障诊断 ,Homogeneous domain generalization-based fault diagnosis, HDGFD ):令 HDGFD 的目的是构建一个特征提取器和一个分类模块,可以使用多个源数据集最小化目标风险。为了清晰地理解HDGFD ,将主要假设归纳如下:1) 由于工况和设备的变化,源域数量并且不同域的数据分布是不同的 2) 考虑同构诊断任务,即不同域的故障模式是相同的 定义6 。(基于联邦域泛化的故障诊断 ,Federated domain generalization-based fault diagnosis, FedDGFD ):FedDGFD 与HDGFD 的区别总结如下:1) 多个行业参与者(称为客户)共同构建故障诊断模型。 2) 每个客户端作为一个域,持有机器状态监测数据。 3) 多个具有相似机器的客户端合作训练深度模型,用于未知目标故障诊断任务。源客户存储有用的标记数据。在训练阶段,不可见的目标客户的数据是不可访问的。 4) 数据隐私应该受到保护。禁止其他用户访问不同客户端的本地数据。 定义7 。(半监督域泛化故障诊断 ,Semisupervised domain generalization-based fault diagnosis, SemiDGFD ):与HDGFD 的不同之处在于,只有一个源域包含标签信息 ,其他源域未标记 定义8 。(基于开集域泛化的故障诊断 , Open set domain generalization-based fault diagnosis, OSDGFD ): OSDGFD 与HDGFD 的区别在于:1) 多个源域和目标域之间的标签空间不相同 2) OSDGFD 的目标是建立一个能够精确分类已知机器健康状态和检测未知故障模式的诊断模型。 定义9 。(不平衡域泛化故障诊断 ,Imbalance domain generalization-based fault diagnosis, IDGFD ): IDGFD 与HDGFD 的区别如下:假定不同域的故障模式相同 健康状态的样本数远远超过故障模式的样本数 定义10 。(基于单域广义的故障诊断,Single domain generalized-based fault diagnosis, SDGFD ): SDGFD 与HDGFD 的区别在于只给出一个源域,即 5.3 相关研究领域
为了进一步说明领域泛化的定义,下面简要介绍了与之相关的一些研究领域,包括多任务学习、终身学习、零样本学习、迁移学习和领域适应。表2总结了它们与域泛化的区别。 表2 域泛化与相关学习范式的区别
多任务学习 [41]共同优化了多个相关任务的模型。目的是通过同时学习辅助任务来提高主要任务的表现。然而,多任务学习并不关注对未知任务的泛化能力的提高,而域泛化主要关注对泛化能力的提高。多任务学习在智能故障诊断中的典型应用是同时完成故障诊断和定位[42]。
终身学习 [43,44]关注的是模型跨多个顺序领域或任务学习的能力。这种学习模式需要模型在保持先前学习经验的同时整合新知识的能力。与域泛化相比,终身学习在每个时间都可以访问目标领域,并且不解决跨领域分布偏移的挑战。一些研究人员将终身学习用于具有增量故障类型的机械诊断[45]。
零样本学习 [46,47]与域泛化有关,因为两者的目标都是解决看不见的分布。然而,零样本学习处理的是标签空间的变化,而域泛化处理的是域偏移。零样本学习的一个典型应用是复合故障诊断。零样本学习是一种很有前途的复合故障诊断工具,其中诊断模型是在单个故障样本上训练的,可以识别未知的复合故障
迁移学习 [48]是一种涉及在源任务上训练模型,然后利用从该任务中获得的知识在相关但不同的目标任务上表现良好的技术。一种流行的迁移学习策略是微调,在训练阶段访问目标域样本,以进一步提高模型在目标任务上的性能。迁移学习和域泛化的相似之处在于它们都处理目标分布与源分布不同的情况。即跨域故障诊断。然而,在域泛化中 ,目标领域样本 不可用
域自适应 [27,49]是最接近域泛化的话题。关于域适应的研究文献非常丰富[50]。域自适应通过调整高维子空间中的分布来缓解域间的分布差异。然而,在实际工业中,域自适应缺乏效率,因为每当新域到来时,训练好的模型必须重新训练。因此,将域自适应技术应用于离线故障诊断。相比之下,领域泛化只训练一个模型一次,并将其应用到任何地方。此外,领域自适应依赖于未标记目标数据总是可用的强烈假设,这在智能故障诊断中可能不现实。
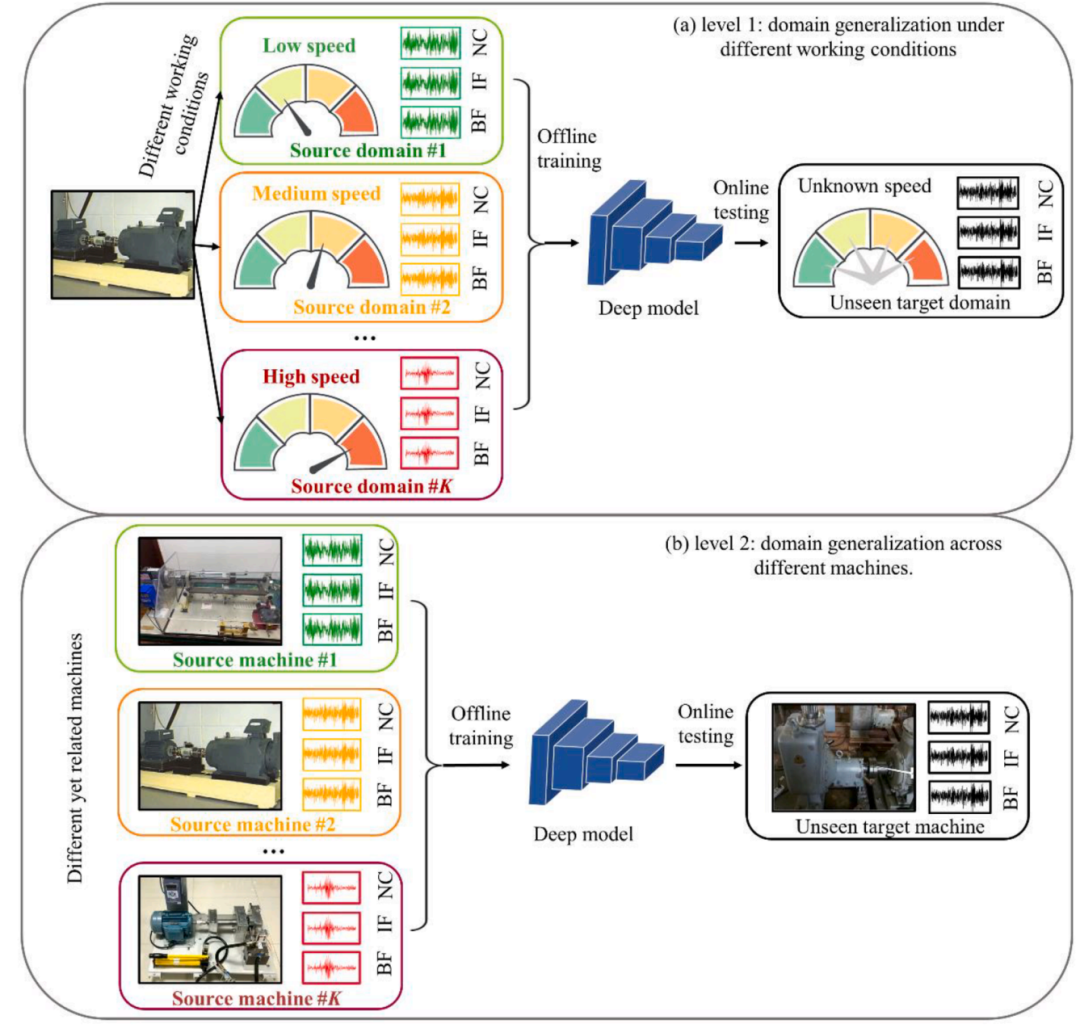
6 域泛化在CDFD中的应用 本节回顾了针对CDFD 开发和使用的域泛化方法的文献。说明了DGFD 方法的一般流程,包括动机、目标、挑战和先进的解决方案。图6直观地展示了不同DGFD 相关应用的设置。
图6 不同应用设置的说明。(a)齐次域泛化。(b)联邦域泛化。(c)半监督域泛化。(d)开集域泛化。(e)不平衡域泛化。(f)单域泛化。
图7 基于域泛化的智能故障诊断一般流程
图7给出了基于域泛化的智能故障诊断的一般流程。要在行业应用中实施一个实际的诊断项目,通常需要遵循数据准备 数据处理 模型构建 行业应用 四个关键步骤 [3,51,52]。 步骤1:数据准备 。在最初的步骤中,目标是准备可用的数据,以提供系统的域泛化模型,该模型可以有效地解决特定任务中的诊断问题。在对特定任务实施DGFD 算法之前,有必要对相关设备进行全面的了解,包括其服务能力和基本物理属性。充分和高质量的数据是利用适当算法设计有效解决方案的后续步骤的基础。振动、声发射、电信号等各类数据蕴含着丰富的综合监测信息。通常有三种可行的方法来获取DGFD 的多源域数据。 第一种是利用在不同工况下从同类型机器收集的数据。
第二种是从公开的数据集中选择相似的数据。
第三种选择是在实验室进行故障模拟实验。
步骤2:数据处理 。与实验室实验数据相比,工业数据具有数量庞大、低价值密度、多源异构数据结构和监测数据连续流四个关键特征。在数据驱动的故障诊断范式中,训练数据的数量主要影响最终诊断模型的性能。大量的干净数据对于提高诊断模型的性能至关重要。因此,数据预处理是至关重要的一步。数据清洗、数据分割和先进时频变换等技术被广泛应用。它们在处理原始工业数据方面已被证明是有效的,因为它们可以消除不一致并提高数据质量。 步骤3:模型构建 。随着人工智能在制造业的不断发展,现在可以使用先进的算法来执行诊断任务。这些算法对特定问题的适应性各不相同。因此,根据可用数据和目标任务选择和利用最合适的算法对于开发有效的解决方案至关重要。除了算法的选择外,体系结构和超参数的选择对诊断性能也起着至关重要的作用。然后,根据可用的训练数据,利用基于梯度的优化器对选择的模型进行优化。 步骤4:行业应用 。诊断模型经过训练后,可用于识别目标设备的健康状态,检测新的故障类型,或依靠物联网对诊断系统中的机组进行监控。 6.2 基于同构域泛化的故障诊断( HDGFD )
6.2.1 动机、目标和主要挑战 深度模型能够从数量有限的源数据中获取常见的诊断知识。如果这一点成立,这些深度模型在面对新环境时可能表现出良好的泛化,如图6(a)所示。主要目标是开发一个既健壮又泛化的诊断模型,使其能够在广泛的环境条件下熟练地执行任务。在此过程中遇到的挑战是获取不变性诊断知识,从而有效地识别系统状态,同时在不同的环境中保持稳定。表3概述了当前通过两级机制增强模型泛化性能的HDGFD 解决方案。
6.2.2 1级解决方案:变工况 变工况,如速度、负荷或操作的频繁变化,导致在训练和测试数据集之间观察到分布差异。因此,人们一直在努力提高 泛化能力 方法 重要的是要注意模型所使用的数据训练和测试是在相同的机器上收集的,但在不同的工况下。训练数据的丰富性和多样性有助于减少过拟合问题,提高数据驱动模型的泛化能力。给定一个数据变换函数,对输入进行变换将数据转化为增广数据,目标域泛化随着数据的增加,编写如下:
如图8(a)所示,Li 等[55]通过水平缩放时间振动数据,人为地制造了额外的假域。通过这种方式,训练数据集得到了显式扩展。不同的拉伸系数可以产生不同的区域。在原始数据中引入细微的变化是处理信号的另一种方法。Han 等[56]通过加入高斯噪声和移幅来增强多源数据,如图8(b)所示。研究者还引入了Mixup 技术[57]来生成假样本。Fan 等[58]在类空间和域空间混合时频图像。Shi 等[59]采用Mixup 生成新的域间样本,如图8 (c)所示。此外,He 等[60]设计了一种基于dropout 的输入特征随机扰动的训练策略。
图8 三种域增强方法的实例。(a)时域扩展。(b)信号变化的域增强。(c)混合增强
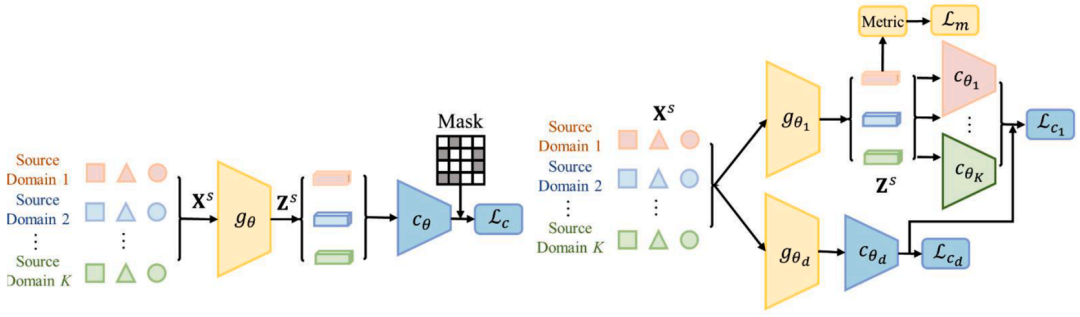
可以发现,数据扩充是提高数据多样性和增强模型通用性的一种简单、低成本的方法 学习对可变域不敏感的域不变表征是一种改进模型泛化的流行框架。 HDGFD 。图9(a)给出了标准架构,其中包括特征生成器
例如,Chen 等人[62]提出了一种新域回归框架,通过学习领域不变表征来诊断旋转机器故障。Zhang 等[63]提出了一种新的基于单鉴别器的条件对抗策略用于轴承故障诊断。除了对抗学习,显式特征对齐也是学习域不变表示的一种方式,其通用结构如图9(b)所示。
图9 不变表示学习的两种典型方法的体系结构。(一)基于对抗。(2)基于指标。
图10 (a) RGMP 体系结构[53]。(b) DGNIS 体系结构[54]。 其中是 Yang 等[64]提出了一种通过center loss 和softmax loss 联合优化的未知工况故障诊断方案。Ragab 等人[65]采用互信息作为提取公共类信息和获得独立于环境的类表示的手段。与上述工作不同,Zheng 等人[35]描述了格拉斯曼流形上每个源域的鉴别结构。 对齐分布是学习不变表征的一个关键挑战。 除了数据处理和表征学习外,研究者还精心设计了不同的学习策略来提高模型的泛化能力。在训练过程中调节单个源域的优化方向可以避免诊断模型学习特定于域的特征[66]。Tang 等人[53]引入了稳健诊断的表示梯度沉默范式,如图10(a)所示。同样,Wang 等人[67]通过最大化梯度的点积来研究不变表示源域之间。Ren 等人[66]使用元学习框架来对齐梯度以构建鲁棒模型。HDGFD 还有其他的学习策略。图10(b)展示了Zhao 和Shen [53]提出的领域泛化网络,该网络同时利用了领域不变性和专用性。 虽然这些直观的方法 然缺乏基本的理论基础 6.2.3 2级解决方案:跨设备 在跨机器应用场景中,数据是从相关但不同的机器上获得的。这种场景的复杂性质,包括各种机械结构 材料和尺寸 训练和测试数据之间的显著分布变化 HDGFD 跨机器的某些初步进展已经成功实现。Shi 等[68]设计了一种基于域可迁移性的动态加权策略,以学习普遍有效的诊断知识。Shi 等人[69]构建了一个泛化网络,其中对比损失除掉了特定领域的信息,多分支模块学习了故障相关的特征。Zheng 等[70]利用先验诊断知识对振动信号进行预处理,并引入正则化项提高泛化性能。因果学习是一种很有前途的挖掘不变量相关性的工具。Li 等[71]提出了一种基于分析的振动数据生成过程的因果一致性网络。从相关轴承机械中学习故障因果表示,并将其应用于目标轴承故障诊断任务。Jia 等[72]提出了一种深度因果分解网络来探索不同域之间稳定不变的因果关系。一般来说,有效的因果学习依赖于正确的结构因果模型,该模型描述了数据生成机制。图11(a)表明,给定两个统计上相关的观测值
图11 (a)数据产生的一般结构因果模型。(b)信号产生的结构因果模型 通过减少联合分布差异 效果微弱的 因果学习是一种 潜在解决方案 6.3 基于联邦域泛化的故障诊断( FedDGFD )
6.3.1. 动机、目标和主要挑战 在实际工程场景中,为单个用户获取足够的监测数据可能具有挑战性且成本高昂,这对开发智能诊断方法构成了重大障碍。这个问题的一个解决方案是从几个具有类似机械设备的用户那里收集带注释的监测数据。通过汇集来自不同用户的数据,可以生成一个全面的训练数据集用于模型训练,从而提高诊断模型的有效性[78]。然而,由于潜在的利益冲突或数据隐私法规,在用户之间直接共享数据往往是不可行的。图6(b)将展示FedDGFD 设置,其中联邦学习使多个用户能够在保护数据隐私的同时在分布式数据集上协作训练机器学习模型。因此,如何在保证数据隐私的前提下对多个用户的数据进行联合建模已成为一个有趣的研究问题。FedDGFD 的目标是构建一个健壮的模型,其中单个源客户端的数据不能与其他客户端共享,并且在模型训练过程中目标客户端的数据无法访问,如图12所示。其中一个关键挑战是在保护隐私的同时在不同客户之间传递知识。期望每个客户机借助来自其他客户机器的信息学习域不变性,从而使中央服务器中的聚合全局模型对各种环境更加健壮。
图12 基于联邦域泛化的故障诊断实例
6.3.2 解决方案
现有的集中式域泛化技术不能直接应用于解决FedDGFD 问题,因为通过云服务器访问存储在多个客户机上的数据是禁止的。关于这个问题的研究还处于初级阶段 Wang 等人[79]报道了一项研究。在他们的解决方案中,人为地创建了一个参考分布。然后,采用对抗训练方法来减小参考分布与实际分布之间的差异。这样,局部模型可以在不需要其他客户端数据的情况下学习广义特征。Zhao 和Shen [80]利用多任务分类器作为领域信息载体,在客户端之间共享领域信息,学习不变特征,不泄露数据隐私。Cong 等人[81]开发了一种基于分类损失的加权局部模型聚合策略。然而,上述研究只是调查模型在不同工况下的泛化,使其应用受到很大限制。在不同位置的多台同类型机器之间构建联邦域泛化框架更有意义和价值。Song 等[82]提出了跨机设置下FedDGFD 的伪Siamese 网络。 虽然研究人员在解决FedDGFD 的域偏移问题上迈出了第一步 6.4 基于半监督域泛化的故障诊断( SemiDGFD )
6.4.1 动机、目标和主要挑战
初代HDGFD 方法需要从观察到的源域中标记样本进行训练,由于获得高质量标签的高成本和劳动密集型性质,这在现实世界的工业试验过程中是具有挑战性的。经常停止操作以检查机器健康状况是不切实际的,这会导致标记数据的短缺,而未标记数据则大量存在。SemiDGFD 的目标是使用包括标记源域和多个未标记源域的训练数据集开发一个通用模型 6.4.2 解决方案
为了解决半监督学习问题,一种常见且直观的策略是用可靠的伪标签标记未标记的数据 Liao 等人[83]将传统的基于伪标签的半监督学习整合到Wasserstein 生成对抗网络中。为了保证伪标签的质量,Zhao 和Shen [84]构建了一个多分支网络,利用标注数据对未标注数据进行标注。此外,采用熵驱动机制来提高伪标记样本的质量。Ren 等人[85]设计了领域模糊策略和度量学习策略来提高伪标签的可信度。与上述三种方法为未标记的源数据分配伪标签不同,Li 等人[86]提出了一种通过最大化分类器差异来生成判别表示的网络,用于轴承故障诊断。 利用标记的源数据为未标记的源数据生成伪标签,从而增加标记的样本量,已经证明了它在解决SemiDGFD 问题方面的有效性 6.5 基于开集域泛化的故障诊断( OSDGFD )
6.5.1 动机、目标和主要挑战
准备包含所有潜在故障模式的全包数据集的过程是一项耗时的任务。测试阶段可能产生新的故障模式,导致训练数据和测试数据之间的标签偏移。在OSDGFD 场景中,诊断模型需要准确地 对 目标样本进行分类 同时还要 精确地将目标异常点识别为未知故障模式 6.5.2 解决方案
基于现有的文献,似乎缺乏专门针对开集域泛化的研究与机械故障诊断相关的挑战。Zhao 和Shen [87]探索了迁移表示空间,通过最小化三重损失实现了判别表示结构。在此基础上,构造了各个类表示空间的最优决策边界,对已知和未知故障模式进行有效分类。巨大的潜力在于探索同时解决领域偏移和类别偏移的解决方案。一个有前途的方向是获得在未知目标域的已知和未知样本之间建立识别决策边界的能力。 6.6 基于不平衡域泛化的故障诊断( IDGFD )
6.6.1 动机、目标和主要挑战
目前许多故障诊断方法都是在训练数据均匀分布的假设下设计的。然而,在机械系统的健康状态下,振动信号等数据很容易采集。如图6(e)所示,在训练集中,健康状态的样本远远超过故障状态的样本 期望建立一个广义的、无偏的诊断模型,以处理类不平衡中的分布偏移。 到目前为止,只有一种 IDGFD 问题的解决方案 Zhan 和Shen [88]对Mixup 方法进行了扩展,以适应多域类不平衡问题。主要思想是使用多个源样本合成可靠的少数类样本 Yao 等人[89]设计了一种选择性平衡采样策略来增强域和类上的隐藏表示。Yang 等人[90]开发了一种新的基于域类可迁移性图的损失函数。 数据增强技术是单域类不平衡故障诊断问题中生成少数类样本的有效方法。考虑到IDGFD 的独特特征,研究跨多个领域使用数据增强技术的潜力具有很大的前景。 6.7 基于单域泛化的故障诊断( SDGFD ) 6.7.1 动机、目标和主要挑战
来自不同领域的不同样本构成了HDGFD 的基础。然而,在实际工业场景中,故障样本是罕见且有价值的。从单个域中收集可用数据的可能性很大。单域泛化的目标是开发一个鲁棒模型,当可用的训练数据仅来自一个源域 该模型能够泛化到未知目标域 为了应对训练数据多样性有限所带来的挑战,已经提出了几种方法来解决计算机视觉领域内的单源域泛化问题[91-93]。这些方法在训练阶段采用先进的数据增强技术,主要目的是模拟不同的域设置。首要目标是将模型暴露于广泛的潜在训练域,从而增强模型对分布变化的弹性。Wang 等人[93]在这方面做出了显著贡献,他们提出了一种以风格互补模块设计为中心的创新方法。该模块用于生成与源域具有显著分布差异的合成样品。随后,在风格互补模块和任务模型之间采用互信息迭代最小-最大博弈,最终增强任务模型的泛化能力。 在智能故障诊断的背景下,仅仅依靠统计信息来生成合成样本,如上述方法[94]所采用的,可能是不够的。下一步,更可取的做法是将领域专业知识整合到数据增强过程中,从而增强生成样本的真实性和可靠性。 7 基准研究 7.1 可用数据集
表4 可用数据集
本综述共纳入了10个能够支持DGFD 研究的数据集(8个开源数据集和2个自收集数据集),如表4所示。 7.2 基准研究
虽然存在许多域泛化算法,但在实验条件下的一致性,包括数据集、网络架构和任务设置,使得公平比较变得困难。本小节旨在对现有领域泛化方法在不同数据集上的有效性进行调查。以往关于跨域故障诊断的基准研究[39]主要关注域自适应方法,利用未标记的目标域数据进行模型训练。然而,本文提出的基准研究侧重于评估各种方法在不可预见的域偏移中的性能,在不可预见的域偏移中,目标域的先验知识在训练阶段不可用。HDGFD 是跨域故障诊断中最受研究者关注的基本问题,在其他情况下的应用研究相对较少。因此,本节对HDGFD 进行基准研究。 7.2.1 对比方法和实现细节
(1) 方法的比较
因为很少有研究者公开他们的代码,其中一些是在基本迁移学习方法的基础上扩展而来的。因此,我们总共选择了8种经典方法作为基准 深度相关对齐(DCORAL )[105]、最大平均差异(MMD )[24]; 具有中心损失的卷积神经网络(CNN-C )[64]、内在和外在域泛化网络(IEDGNet )[56]; 结合不变性和特异性的域泛化网络(DGNIS) [54]。 (2) 实现细节
除平均准确率外,还计算了各算法相对于ERM 的排名分数。排名分数是根据算法相对于同一数据集的ERM 精度所达到的精度来确定的。对于每个数据集-算法对,根据所达到的精度是否低于、等于或高于ERM 精度,分配-1、0或+1的分数。附录E给出了具体的实现细节。 7.2.2 跨工况下的域泛化
(1) 任务描述
在本小节中,首先对不同的算法在交叉工况诊断任务上进行评估。基于6个数据集共设计了24个诊断任务 (2) 性能分析
图13 不同方法在交叉工况设置下的诊断准确性。(一)CWRU。(b)PU。 (c)PHM09。(d)LW。(e) HUSTbearing 。(f)HUSTgearbox。
图13给出了不同方法在不同数据集上的诊断准确率。从图13中,可以看到以下观察结果。 1) 从图13(a)可以看出,包括最简单的ERM 方法在内,8种方法的准确率都接近100%。原因是CWRU 数据集中的信号被预先去噪。此外,在不同工作条件下采样的数据分布差异最小。这些结果表明,在不同的工作条件下,常用的CWRU 数据集不适合HDGFD 实验
2) 从图13(b)中不难发现,不同的方法在任务5C和7C上的准确率普遍不理想,而在任务6C和8C上准确率较高。原因可能是任务5C中目标域的机器转速(900转/分)与源域的机器转速(1500转/分)不同,如附录B.2所示。类似地,任务7C中目标域中的机器负载(400N)不同于源域的负载(1000N)。这些结果表明,目标域的工作条件在源域的工作条件中没有属性,这对诊断模型的泛化性能提出了很大的挑战。相反,当一个单一的工况属性与源域共享时,即使目标域中的属性组合与源域中的属性组合不同,任务也变得相对容易。因此,在广泛的条件下获取数据证明对训练是有利的。这些数据集将包含与特定条件相关的独特操作特征。
3) 在PHM09 数据集的4个相关任务(Task 9C-12C)中,所有方法的准确率普遍接近50%,如图13(c)所示。先前的研究[39]表明,即使在训练过程中使用未标记目标数据的先进DAFD 方法,所获得的准确率仍然在50% ~ 60%的范围内。在PHM09 数据集中识别故障模式的挑战性是显而易见的。复杂的机械传动结构与信号耦合,降低了现有数据驱动诊断模型的有效性。复杂系统在动态工况下的故障诊断仍然是一个重要的研究课题,也是一个重要的难点
4) 在LW数据集衍生的4个诊断任务中,任务15C和任务16C比任务13C和14C更具挑战性,如图13(d)所示。Task 15C和Task 16C中目标域的机器负载相对于Task 13C和14C中要轻一些。载荷的大小对机器的振动性能有影响。在复杂的作战环境中,传感器获得的信号往往带有额外的干扰信息。这导致滚动轴承的振动和冲击信号变得微弱,并且很容易被强背景噪声掩盖,特别是在低负荷条件下。因此,与不同健康状态相对应的信号之间的区别减少了。因此,发展信号处理技术以提高故障与噪声之间的信噪比 对于增强模型的泛化能力至关重要。
5) 可以看出,在任务17C中,不同的方法都不能准确地识别故障模式。此外,在四个任务中,IEDGNet 和DGNIS 方法的性能始终较其他方法差,如图13(e)所示。现有的方法只在某些数据集上表现良好,而在其他数据集上表现不佳。在未来的研究中,建议的方法应该在多个数据集中进行评估。从图13(f)可以看出,Task 21C和22C比Task 23C和24C难度更大。在任务21C中也可以发现,ERM 优于其他方法,说明不能严格保证高级领域泛化技术的可靠性。
6) 30个任务的结果表明,没有一种方法始终优于ERM 。如附录F.1-F.6所示,有些方法甚至不能在一个数据集的四个任务上一致地获得更好的准确性。例如,IEDGNet 方法在HUSTgearbox 数据集上表现良好(排名得分为+2),而在PHM09 数据集上表现糟糕(排名得分为-4)。因此,ERM 应该始终作为所有未来评估的基线。
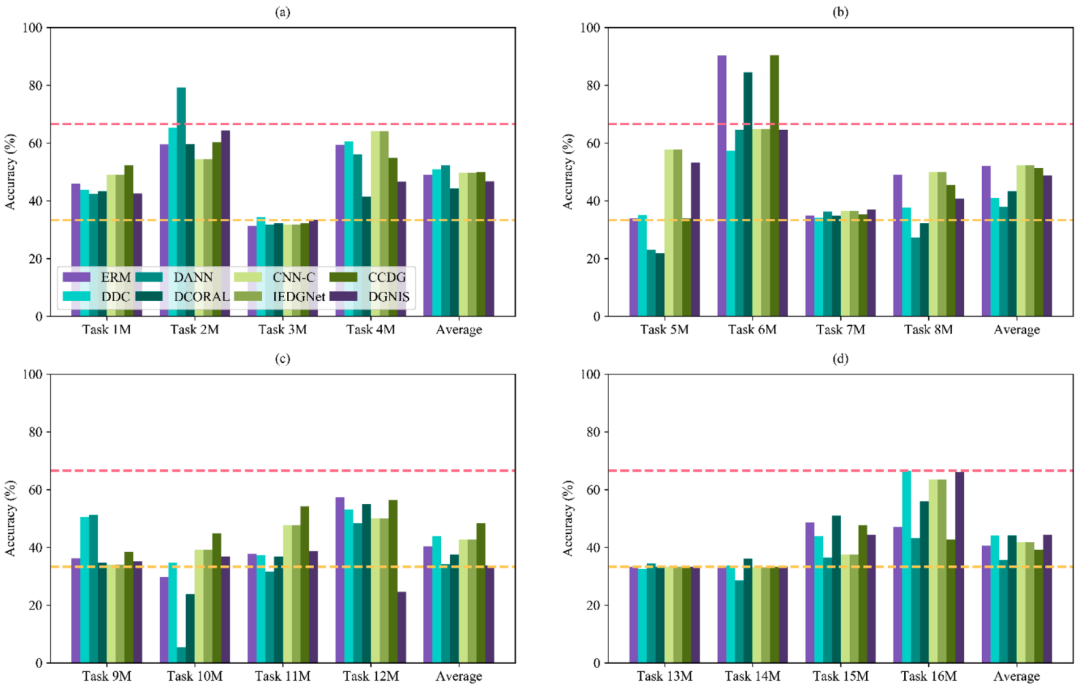
7.2.3 跨机器下的域泛化
(1) 任务描述
内圈故障和外圈故障是轴承常见的故障模式。因此,在跨机器场景中,除了健康状态外,还考虑了三种轴承健康状态。共设计了16个跨机器场景下的HDGFD 任务。 (1) 性能分析
图14 不同方法在跨机器设置下的诊断准确性。(a)第一组。(2)第二组。(3)第三组。(4)第四组。因为这是一个三分类任务,所以黄色虚线表示准确率为33.33%,而粉红色虚线表示准确率为66.67%
1) 尽管只考虑了三种机器健康状态,但不同的方法在所有16个任务上的表现通常都很差。这些结果表明,跨机器场景下的机器健康状态诊断非常困难 不同的机械结构、不同的采样频率和不同的共振特性导致不同的域之间存在显著的分布差异 跨机器故障诊断具有普遍的应用需求,是当前研究的热点
2) 比较任务6M和15M的任务设置和诊断结果,其中只有一个源域不同,八种方法的整体性能差异显著。这些结果表明,选择合适的源域是重要的。然而,现有的HDGFD 研究普遍忽略了这个必要的问题。关于选择最优源域的有限报道来自Yang 的工作[106]。不幸的是,他们的研究重点是在DAFD 场景中选择最优源域。在HDGFD 问题中,如何选择最优源域是一个比较复杂的问题。这种复杂性的产生是由于在多源领域合作机制中,仅考虑相似性是不够的。特征独特性也强烈影响最终诊断模型的性能。此外,确定合适的源域数量也是一个重要的挑战 源域数量过少,则缺乏数据多样性 源域的数量太大 源域包含质量差且不相关的数据,从而导致负迁移
3) 与跨工况任务的结果类似,没有一种方法始终优于ERM 。在高阶空间中减少多源域间的域偏移可能不是解决故障诊断中域泛化问题的有效方法。失败的主要原因是深度模型倾向于过度拟合数据并学习虚假的相关性。此外,这些方法缺乏理论保证,实证研究表明它们在现实世界中的效用值得怀疑。基准研究表明,单个算法无法在所有机械诊断任务中获得优异的性能。因此,研究人员需要在未来的工作中提供预测的可靠性。还鼓励研究人员澄清其提出的方法的应用限制。
4) 当目标域数据来自CWRU 数据集(Task 4M, 8M, 12M, 16M)时,8种方法的准确率普遍较高。这是因为不同机器健康状态的信号在CWRU数据集中具有区别性,便于构建的模型对其进行识别。
8 未来发展方向 尽管使用数据驱动的方法在故障诊断方面取得了重大进展,但它们的黑箱性质往往导致学习到的特征具有不可控和不可解释的属性。这限制了它们在行业中的适用性。此外,第4节的基准研究表明,现有方法在泛化方面存在弱点,特别是在跨机器故障诊断场景中。解决这些问题的一种方法是在解释构建的模型和学习到的可迁移表征时结合领域知识。因果学习[107]提供了一个互补的视角。开发适合智能故障诊断的结构因果模型(SCM ) SCM ,它就可以作为深度模型训练的指导框架。这个过程有助于提取广义特征,消除误导性的相关性。领域知识与数据驱动方法的无缝集成提高了 可解释性和可靠性
智能故障诊断领域的许多研究人员主要关注识别更有效的人工智能模型,以提高诊断系统的性能,而通常保持数据基本不变。然而,在DGFD问题的背景下,数据的重要性越来越明显。如第4节所示,多个源域的良好执行组合可以构建强大的诊断模型,甚至不需要使用复杂的方法。因此,如文献[108]所强调的,设计有效的技术来选择和精炼训练数据集变得至关重要
a) 当面对包含机器规格、潜在故障、工作环境等的特定诊断场景时,从数据存储库中识别最相关和最有价值的数据集成为一项至关重要的工作。研究人员被鼓励制定数据选择标准,帮助工业现场的技术人员做出明智的数据选择[109]。 b) 考虑到所选数据来自各种来源,表现出不同的采样率、不同的环境噪声水平和不同的机器特性,将这些数据集统一成一个连贯的整体的挑战仍然是值得未来研究的主题[70]。 c) 敦促研究人员贡献他们的高质量数据集,形成一个全面的数据存储库。这样的资源可以极大地有利于实际应用,并促进算法的发展[50]。 一旦一个诊断模型在不同来源的样本上进行了训练,并被部署到目标机器的在线状态监测中,它就开始接收和处理反映机器状态的稳定数据流。考虑到该数据流的动态特性和不断发展的状态信息,模型有机会获得新的见解。这可能会潜在地提高模型的性能。
然而,当新的样本出现时,现有的训练良好的模型必须连同其先前的学习一起被丢弃并重新训练。这将导致大量的计算需求和时间支出,如果不及时处理,可能会导致数据失去其意义。因此,使诊断模型适应工业大数据环境中的这种流是至关重要的[110,111]。智能系统应该能够从新出现的样本中学习新的模式和故障模式
a) 执行连续的域泛化 b) 现有的诊断方法通常假设机器的健康状态保持稳定。然而,在实际监控场景中,可能会出现新的故障模式。因此,有必要设计模型,不仅要泛化到新的领域,还要扩展其功能,以包括监视过程中可能出现的新故障类。这种前瞻性的方法将增强模型在未来情景中的适用性。 如振动、声学和热图像,可以提供丰富的机械系统操作信息,并提供更清晰的故障指示[112]。新兴的生成式人工智能技术,如GPT-4 ,利用包括文本、图像和视频在内的多模态数据作为输入。这种方法可以对齐多模态数据并捕获跨模态知识,最终在新的环境和任务中产生高泛化能力。在这个概念的基础上,智能故障诊断的多模态模型的发展具有重要的前景。
a) Transformer 作为大型基础模型的基本模块,由于其突破性的架构设计,具有出色的特征提取性能。设计适合故障诊断的Transformer 变体 b) 不同模态数据之间存在差异和冗余。通过多模态共同学习来整合两个或多个模态的信息 9 结论 领域泛化是一种很有前途的工具,可以加速数据驱动故障诊断方法在工业中的实现。本文从面向应用的角度对现有的DGFD 方法进行了分类。然后阐明了智能故障诊断的领域泛化和相关的学习范式。详细介绍了不同应用场景的动机和主要挑战,并概述了相应的解决方案 DGFD 模型,我们收集了8个开源数据集,并发布了2个自收集数据集,可用于跨工况和跨机器场景 DGFD 模型性能的见解。最后,我们提出了新的思路和展望,为今后的研究工作提供进一步的动力。我们希望本文能够提供DGFD 的概述,并鼓励更多的研究。 来源:故障诊断与python学习