黏弹性:广义Maxwell模型本构理论推导

本文摘要:(由ai生成)
本文深入探讨了二阶及以上的广义Maxwell黏弹性模型理论及其实现方法。文章介绍了高阶微分形式的广义Maxwell本构,包括一维到三维模型的推广,并提出了简化模型控制方程的方法。文章还将理论应用于UMAT列式,提供了一种更通用、易扩展的黏弹性格式。该科研笔记旨在帮助有需要的读者,同时作者欢迎读者反馈并承诺提供UMAT本构代码。
0. 上回书说到
2024年1月30日,小喵发了一篇文章:
里面介绍了基础的黏弹性模型,包括Kelvin和Maxwell形式的标准线性模型(Zener模型),如何从一维推导向三维,以及如何将微分形式的本构关系与Prony级数形式的公式联系起来。
这篇文章在此基础上更进一步,讨论一下二阶及以上的广义Maxwell模型的理论,以及如何实现。
备注:这篇文章是小喵出于自身科研需要而总结。我自己也是学习者,一边推导一边写成了这篇推送。限于能力和水平,无法100%保证全部推导都是正确的,只能说我已尽我所能保证推导和讲解过程的可读性和准确性。
这篇文章,本想把UMAT代码都写完后再一起发出来。但鉴于后续时间安排,恐怕就又要延后一星期甚至更久。写到这里Markdown源文件已经有超过18,000个字符,考虑到篇幅因素,还是决定把公式推导部分提前单独发出来。
正文目录:
0. 上回书说到
1. 高阶微分形式的广义Maxwell本构
2. 引入局部应变的简化形式
3. 广义Maxwell黏弹性UMAT列式
4. 结尾和预告
观前提醒,如果读到某个公式卡壳,千万不要死磕。第1节的公式形式复杂,到第2节会变简单。
1. 高阶微分形式的广义Maxwell本构
让我们回顾一下,从一根Maxwell黏弹性元件开始。

弹簧和阻尼器串联,两个元件应力相等,总应变等于二者叠加。因此Maxwell元件的控制方程可以用应变率的形式写为:
那么,对于一根刚度为 的弹簧和一根 的Maxwell元件并联组成的,Maxwell形式标准线性模型(这里把弹簧刚度的下标修改成0,是为了和后面广义Maxwell模型一致),它的弹簧和Maxwell两个元件并联,应变相等,应力为二者叠加。
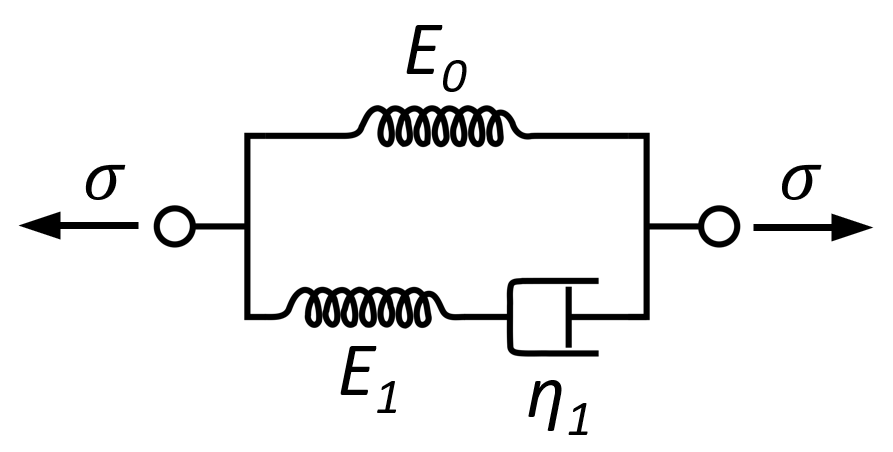
对于弹簧元件,有:
对于Maxwell元件,和前面公式 一样:
这里我们使用一个比较通用的推导方式,方便向高阶推广:从应力的零阶导数项开始,试着让方程中不要出现 这种局部元件应力,只有整体应力 。
为了实现这个目的,我们首先写出:
将公式 做简单的变形,结合公式 ,可以写出:
很显然,公式 还不够干净。它的右侧还多出来一个 项。
为了把它平衡掉,我们回头来看公式 。把公式 左右两边同时对时间求导,形式还是不变的:(求导符号我也懒得改正体了,太麻烦了,毁灭吧……摆烂.jpg)
这样就有了 。我们用它来平衡掉公式 中应力对时间的一阶导数项,就得到:
引入弛豫时间 ,简单整理一下,就大功告成:
式 就是一阶广义Maxwell黏弹性模型的控制微分方程,描述应力和应变(以及它们的时间导数)之间的关系。很简单,很好理解,对不对?甚至对于刚才我们推导的一阶广义Maxwell模型来说,仅靠观察也差不多能得到这个结果,随便怎么推都能推出公式 来。
——————
那现在让我们考虑二阶广义Maxwell模型。模型里的参数分别为 。
对于弹簧元件,显然有(这次我们直接准备到二阶导数):
对于两个Maxwell元件,和公式 一样。但这次我们也给它多准备一阶的时间导数:
还是和刚才一样,首先写出 :
果然,这次的公式 里面想要再直接用弹簧元件的一阶导数是不能摆平了。因为这次两个局部应力导数前面的系数不同。
那么为了伺候这两位爷,我们构建出下面的形式:
在 里面,把 那两项刨除掉,剩下的几个导数项,把 里面对时间求过一阶导的公式拿出来,简单变变形:
综上,我们把公式 和 放在一起,合并同类项:(这公式已经有点长了)
诶,现在我们可以发现,在公式 中不平衡的 两个时间导数项,在公式 里面系数变得一致了。这样,只需要在公式 中补充上 的项,即可完全消去局部应力,得到整体应力-应变之间的微分关系。
所以最终,二阶Maxwell黏弹性模型的控制方程,我们这里就可以参考之前黏弹性的推导,引入弛豫时间 :
最终形成公式 。类比一下,和前面的公式 形式很像,对不对。
到这一步,我们可以大致用文字总结一下。
对于包含1个弹簧和N个Maxwell元件的广义Maxwell黏弹性模型,为了推导出其总应力-总应变之间的关系,需要列出每个局部元件的控制方程,并将每一行方程对时间求导。然后从应力对时间的零阶导数开始,逐层将局部元件的应力加总。这一过程总会残留下应力对时间的更高阶导数项。重复此过程,一直到应力对时间的第N阶导数项才可以被完全配平。
(好像用文字怎么描述都说不太清楚。不过如果你认真跟着前面的推导读下来,相信你一定可以理解这段话。)
推广到N阶,对于包含共计1个弹簧和N个Maxwell元件的广义Maxwell黏弹性模型,其控制方程的一般形式为:
——————————
前方高能。这个形式来自维 基 百 科,可难写了……
——————————
稍微展开一点,另外一种通用形式:
我已经懒得再仔细解释上面那两坨公式了。总之,按照前面的推导逻辑,N阶广义Maxwell模型的控制方程里确实需要包含应力和应变对时间的最高N阶导数。
推导结束,可喜可贺……是吗?
如果有限元软件里的广义Maxwell黏弹性模型要拿上面的控制方程去写代码,那这代码的繁琐程度恐怕就不是一般人类能看懂的了。
2. 引入局部应变的简化形式
还有没有更简洁一点的形式呢? 就,类似之前我们看到过的Prony级数,对于广义Maxwell模型的松弛模量,多一阶只需要加一项(而不是提升一阶导数):
——那肯定是可以的。
仔细想一想前面的推导,我们为什么要这么麻烦地去不断提高应力和应变对时间的求导阶次?
答案是为了得到总应力和总应变之间的关系,在方程里抹掉所有局部元件的信息。
那么,如果我们在方程里保留每一个局部的信息,会怎么样呢?
实际上,这就相当于在控制方程里引入更多额外的变量,提高方程组的维度,从而降低方程组的阶数。
来,一起来见证魔法。
仍然以最简单的一阶广义Maxwell模型为例。
这一次,我们在列出 的时候,不再追求把两部分应力合并在一起,就这么分开放着。本构关系是应力与应变之间的关系。那么既然要把 和 分开,也就要多定义一个独立的应变。很显然——在这个模型里,我们可以把Maxwell元件中阻尼器的应变单独写出来。
将阻尼参数为 的阻尼器应变定义为
那么 那根弹簧的应变就应该是
这样,弹簧部分本构仍然是
Maxwell部分的本构:
这次在式 中,我们要用 和 来表示 ,而不要出现高阶导数 。这也不难,只需要把式 对时间的导数降低一阶:
就可以写出一阶广义Maxwell模型的控制方程了:
很显然,模型中的 实际对应Maxwell元件的应力卸载到零时,黏弹性模型的长期模量;而 对应的则是黏弹性模型的瞬时模量。
(投共一念起,刹那天地宽。)引入黏壶应变 后,我们发现式 这样的黏弹性控制方程形式一下子简洁了许多。同理二阶广义Maxwell黏弹性模型的控制方程就可以写为:
直接就可以把N阶控制方程的通用形式都写出来了。
当然,增加了N个变量,还需要相应地补充N条方程,说清楚 和 之间的关系。这并不难。对式 做一个变形:
式 构成了完整的N阶广义Maxwell黏弹性模型的控制方程。
绕了一大圈,原来这么简单就解决了啊。那你早说呀,我前面还吭哧吭哧推那些公式干嘛呢。
3. 广义Maxwell黏弹性UMAT列式
现在,有了前面的公式 ,再来审视一下黏弹性本构模型的UMAT。让我们把它修改成更通用、更方便扩展的广义Maxwell黏弹性格式。
从式 出发,这个本构直接可以推广到三维。三维的广义Maxwell模型本构关系可以用张量记法写为:
其中,上标显然不表示乘方,主要是下标被张量标记占了只能写成上标。 是和第n个Maxwell元件关联的阻尼器内应变, 是对应的弹簧刚度。第一个 是瞬时模量, 和前面的 一样都是四阶弹性张量,具有相同的形式。每一个 都服从以下关于时间的微分方程:
根据公式 ,其实就可以直接写出相应的具体有限元列式。为了使方程形式简洁,使用 两个变量作为弹性常数。将初始(瞬时)Lamé常数记为 ,一阶广义Maxwell元件对应的刚度为 ,相应的弛豫时间为 。则式 可以用张量的形式展开为:
这里的符号记法与前文略有出入:前面描述广义Maxwell模型的时候,我们将并联的单个弹簧单元的刚度写成 ,下标为0以和其他Maxwell元件形成区分。但实际上我们知道那根弹簧的刚度 其实是整个模型的长期模量。
在后面的推导中,我们为了和Abaqus文档里的黏弹性公式保持一致,将初始的瞬时模量下标写为0,而将长期模量的下标写为 。例如,瞬时Lamé常数为 ,对应的长期模量数值为 (读者如果要参考本公 众 号文章来组织自己论文中的公式,请自行斟酌标记的前后逻辑一致性)
写成矩阵形式(哎呀这段LaTeX可难写了):
要注意,在Abaqus文档页
Abaqus > Introduction & Spatial Modeling > Conventions > Convention used for stress and strain components
里面,介绍了Abaqus以向量形式存储张量分量的顺序。上面使用的顺序是Abaqus/Standard的存储顺序。Abaqus/Explicit使用了不同的顺序: 这样。
另外,同一页文档还写明,Abaqus始终使用工程剪应变, :
所以后面的 剪切分量,我这里也自动乘了2.
同样使用中心差分列式(此处下标表示该变量所处的时刻),
式 可以写为:
化简后得:
式 的形式就可以简单地扩展到2阶乃至更高阶的Maxwell黏弹性模型:
这里常数的n写成了下标,局部应变 的n则写成上标,实在是为了尽可能在符号表达上前后逻辑一致,没有正经张量分析里面上下指标平衡求和的说法。但好像……n在这里确实变成了哑指标,也确实有一个最大N阶的求和符号,但那个纯属意外。只有 的下标k是需要按照张量规则(爱因斯坦求和约定)来求和的。
在UMAT实现中,还是要根据上一步的应力 、应变 和应变增量 ,计算出新的应力 和雅可比矩阵 DDSDDE。这个其实也很简单。
以一阶广义Maxwell模型为例。将当前时间增量步结束时的应力记为 ,当前增量步开始时的应力记为 ,应力增量为 ;同理也有 。
把它们代入式 ,由于整个方程都是线性的,所以可以直接得到:
然后把前面的 再用这一套记法重写一遍:
从式 出发,根据偏导的定义,可知:
这样就能写出DDSDDE矩阵的分量了:
把式 ~ 和前一篇黏弹性文章中推导出的列式做一个对比。因为变量记法不完全相同,我们把上一篇推送中的列式按照本文的符号记法写出来。长期模量记为 :
式 ~ 中,上一篇黏弹性推送的变量与本节变量之间的对应关系为:
考虑到长期模量和瞬时模量之间的关系:
式 ~ 就可以很直观地变换成式 ~ 的形式了。(这段是真的很显然啦)
参照式 ~ ,把黏弹性有限元列式扩展到高阶也就是做加法的问题(下面的形式和 一致,但我不用kronecker delta,把它展开写一遍):
雅可比矩阵分量为:
最后一个不成问题的小问题。Abaqus内置的广义Maxwell模型,是用体积模量 和剪切模量 来定义的。上面的公式 ~ 要怎么转换?
答:剪切模量 和Lamé常数 是同一个数。而体积模量 则可以写为:
具体的转换相信不用多说了。可以期待一下 下一篇的UMAT对比验证。
4. 结尾和预告
之前小喵在公 众 号上发图提问说有没有人对广义Maxwell黏弹性理论的推导感兴趣。有好几位网友私信我表示需要。真的非常非常感谢您们的关注。小喵写公 众 号的初心其实一直有些自私,首先是作为我自己的学习笔记,为满足我自己的课题需要,或是为我的好奇心服务。
但,人总是社会性的动物。网友的关注和回复真的会给我很大的动力。








我知道有些朋友也是为了解决您自己科研和工作中遇到的问题才找到这里。小喵能力和水平有限,不能帮每一位网友答疑。但还是感谢每一位后台回复的朋友,感谢您让我知道,我为自己工作整理的这些公式,也能或多或少对您有一点点帮助。如果这篇推送和您或您朋友的工作有关联,欢迎转发朋友圈。如果您跟着我的推导读完了,并愿意在后台告诉我,我也会很开心的。
下一篇我会写出线弹性-广义Maxwell黏弹性的UMAT本构。我没写过特别多代码,尤其是UMAT Fortran编程,很多语法和trick我也掌握的不好,所以还需要进行一番测试和调试才能发出来。
上一篇黏弹性的推送后面附的UMAT代码有一处就好像是写错了( 应该在分母,我把它写成了分子。验证的时候这个参数取1所以没发现)。我也会在进一步确认以后,在下一篇推送里面补充勘误。
这篇推送除了公式 使用了SimpleTex自动图像识别以外,大部分公式都是我用LaTeX手敲的。过程中还遇到了mdnice编辑器的bug,导致这篇文章的公式编号全部使用了{equation}域的自动编号而不是分节手动编号。还好问题不大,最后还是能成功渲染出来。



