机器学习方法在流体力学当中的应用
本文摘要:(由ai生成)
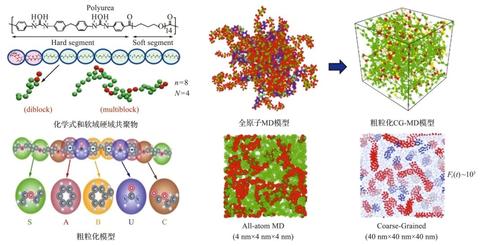
本文概述了机器学习在流体力学中的应用,涉及问题定义、数据收集、模型架构、损失函数和优化算法等阶段。文章讨论了如何结合物理知识,提供流体力学实例,介绍了湍流减阻反馈控制、深度强化学习在流体力学的应用,以及监督学习在流体流动评估中的性能。这些研究展示了机器学习在流体力学建模、控制和优化中的潜力和进展。
文一:

机器学习在流体力学研究中的应用
摘要:
本文简要概述了如何使用机器学习建立流体力学中的数据驱动模型。机器学习的过程分为五个阶段:(1)确定和形成模型的问题,(2)收集和管理训练数据以训练模型,(3)选择表示模型的架构,(4)设计损失函数以评估模型的性能,以及(5)选择和实现优化算法以训练模型。在每个阶段,我们都会讨论如何将先验物理知识嵌入到过程中,并举例说明流体力学领域的具体例子。
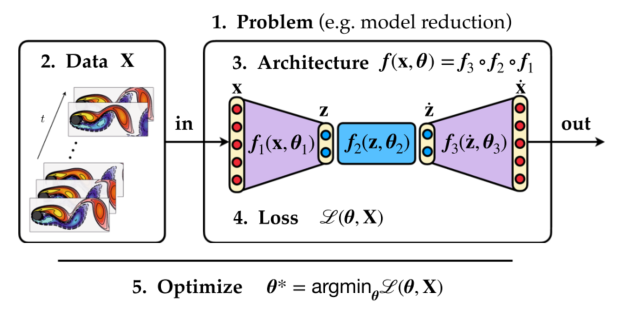
图:机器学习的五个阶段示意图——以降阶建模为例。
原文PDF文件:
文二:
doi:10.1017/jfm.2020.690
基于机器学习的湍流减阻反馈控制
摘要:
Choi等人(J.Fluid Mech.,vol.2621994,pp.75-110)设计的一种成功的减摩反馈控制,称为“反向控制”,在应用中有局限性,因为传感器需要放置在稍微远离墙壁的位置,即y+=10,并测量瞬时墙壁法向速度。在本研究中,我们使用Reτ=178时的非受控湍流通道流数据库来训练卷积神经网络,以提取壁剪切应力和压力的空间分布,这些空间分布密切代表y+=10时的壁法向速度。根据壁面变量分布预测的y+=10时的壁面法向速度与真实速度之间的相关性非常高,流向和翼展方向的壁面剪切应力和压力分别为0.92、0.96和0.96。我们对具有瞬时吹风和吸力的湍流通道流进行反馈控制,该控制由训练的卷积神经网络根据测量的壁面变量分布确定。在控制过程中,预测的壁面法向速度在小到中等尺度上的能量高于实际速度,这降低了减摩阻力的控制性能。通过对预测的壁面法向速度应用低通滤波器来去除这些水垢,我们将皮肤摩擦阻力减少了高达18%,其数量与反向控制相当。在Reτ=178下训练的卷积神经网络也应用于更高的雷诺数流(Reτ=578),并成功地减少了15%的表面摩擦阻力。
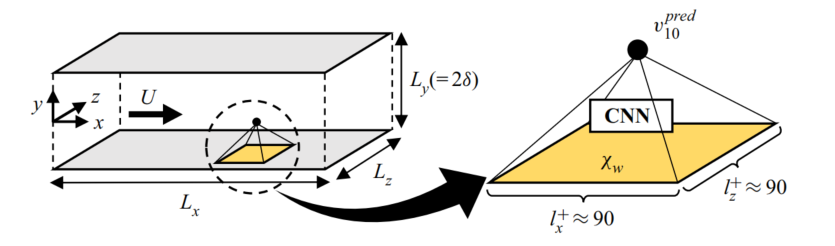
图:原理图。

图:相关系数的云图表示。

图:现有卷积神经网络的原理图。

图:湍流通道中平均气压梯度的时间历程

图:基于输入壁变量的机器学习技术性能预测。

图:本研究中使用的生成对抗性网络。
原文PDF文件:
machine-learning-based-feedback-control-for-drag-reduction-in-a-turbulent-channel-flow.pdf
文三:

流体力学的深度强化学习综述
摘要:
深度强化学习(DRL)最近被广泛应用于物理和工程领域,因为它能够解决以前由于非线性和高维的结合而无法解决的决策问题。在过去的几年里,它已经在计算力学领域传播,特别是在流体动力学领域,最近在流动控制和形状优化方面得到了应用。在这项工作中,我们对现有的DRL在流体力学问题中的应用进行了详细的回顾。此外,我们还介绍了最近的结果,进一步说明了DRL在流体力学中的潜力。介绍了每种情况下使用的耦合方法,详细说明了它们的优点和局限性。我们的综述还集中在与最优控制和优化的经典方法的比较上。最后,描述了几个测试案例,说明了该领域的最新进展。本出版物的目标是为希望解决这些方法的新问题的研究人员提供对DRL能力以及流体动力学中最先进应用的理解。
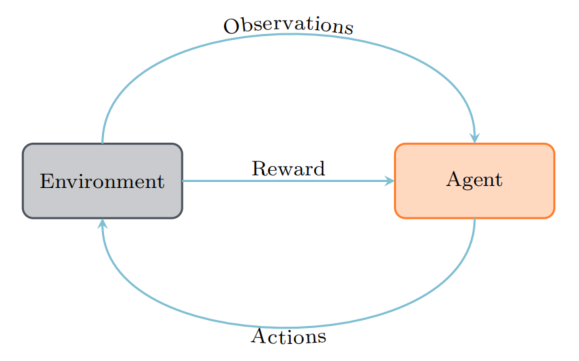
图:DRL代理及其环境。
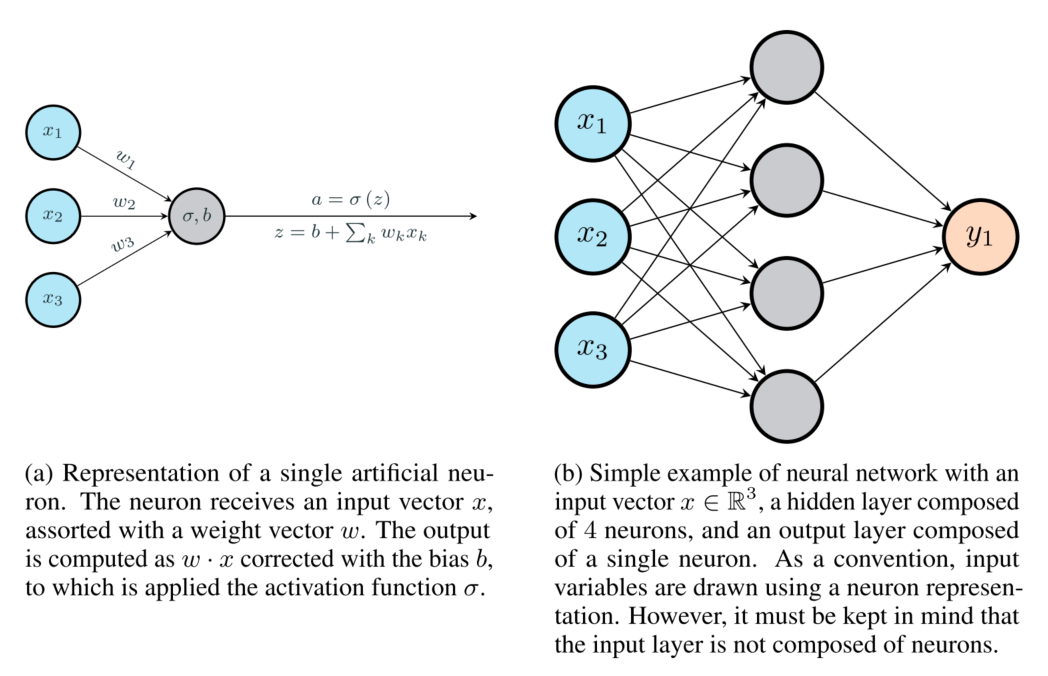
图:单个人工神经元和基本三层神经网络的表示。

图:自2010年以来每年提及“深度强化学习”的出版物数量。

图:控制刚体的流体喷射。

图:DRL代理的目标流程和结果。
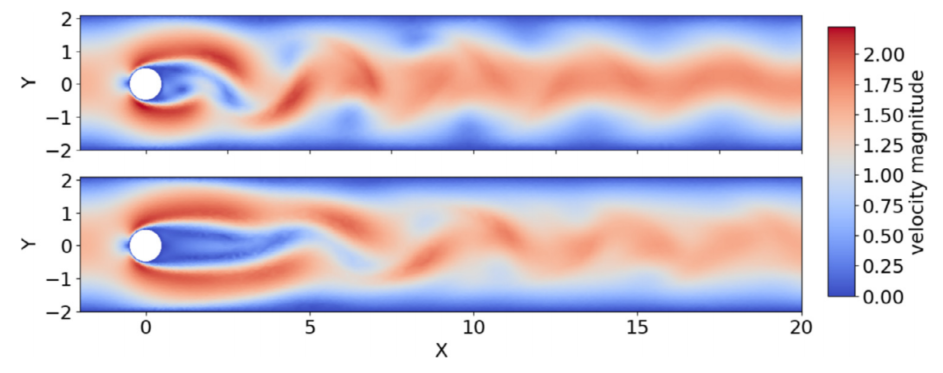
图:无(顶部)和有(底部)主动流量控制时速度大小的比较,可以看到圆柱体尾流的明显变化,类似于船尾流。
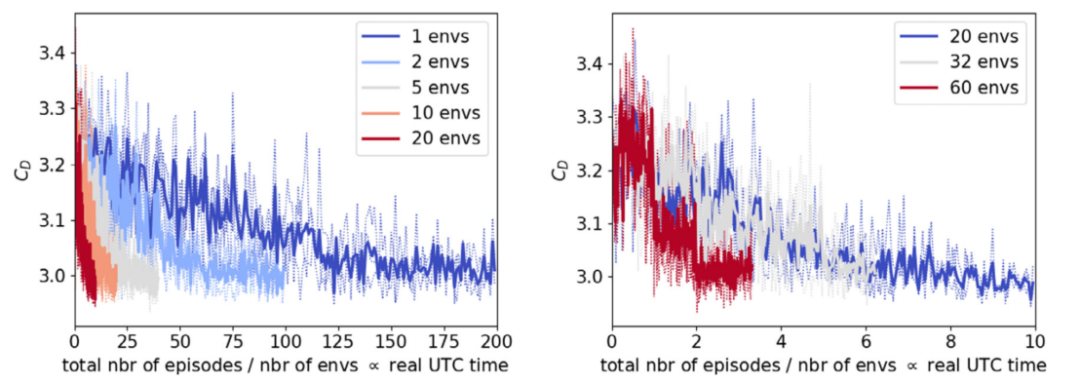
图:使用多环境方法通过DRL加速ANN训练。
原文PDF文件:
A review on deep reinforcement learning for fluid mechanics.pdf
文四:

流体流动的监督机器学习方法的评估
摘要:
我们将监督机器学习技术应用于流体动力学中的许多回归问题。对四种机器学习体系结构的特征、准确性、估计成本和规范流问题的鲁棒性进行了检验。对于带有格尼襟翼的圆柱体和NACA0012翼型上的流动,我们考虑从表面上有限数量的传感器估计力系数和尾流。还考察了训练数据的时间密度的影响。此外,我们考虑在二维圆柱尾流、二维衰减各向同性湍流和三维湍流通道流的超分辨率分析中使用卷积神经网络。在总结语中,我们总结了本文所考虑的一系列回归型问题的研究结果。

图:本文讨论了流体流动的有监督机器学习问题综述。我们专注于直接数值模拟数据的重建和估计任务。

图:a感知器。b多层感知器是感知器的集 合。

图:a. 决策树。b. 随机森林,可以看作决策树的集 合平均。

图:二维卷积神经网络。
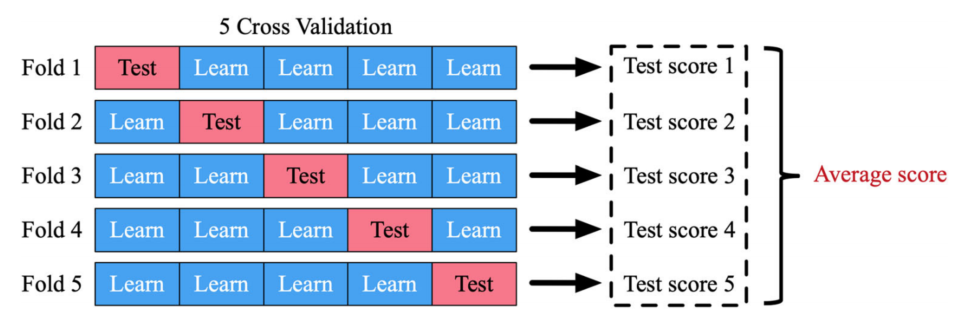
图:一个五重交叉验证的例子。蓝色的框表示用于推导机器学习模型的训练数据。红色方框表示用于获得测试分数的测试数据。优化程序和评估采用五个测试分数的平均分。
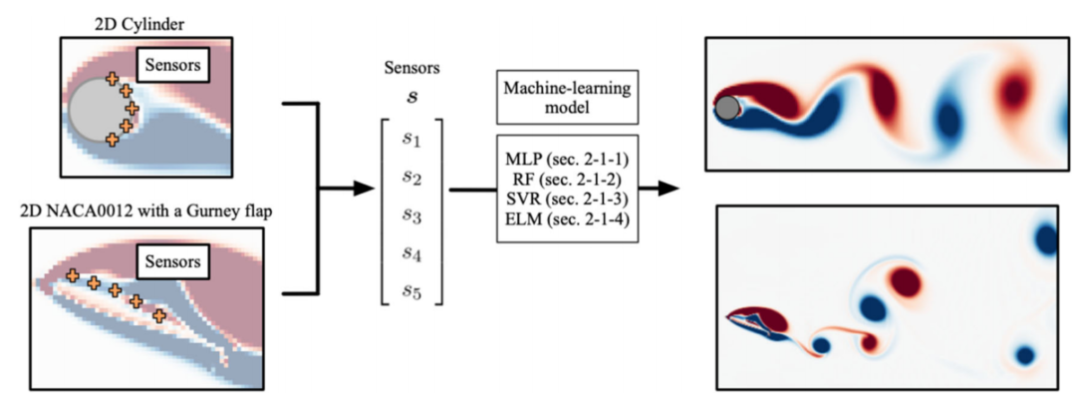
图:使用机器学习和五个表面传感器测量进行尾流重建。

图:Gurney 襟翼尾迹重建圆柱体和 NACA0012尾迹的总结。

图:五次噪声表面传感器测量重建的圆柱尾流涡度场。

图:传感器数量对圆柱尾流重建的影响。

图:基于机器学习的超分辨率重建。

图:二维混合下采样跳跃连接/多尺度(DSC/MS)模型。
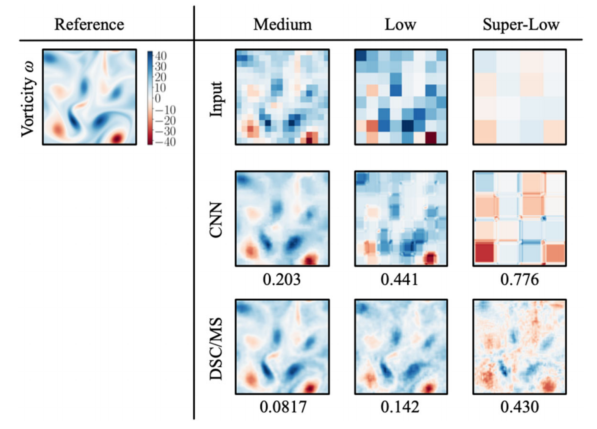
图:基于机器学习的二维湍流超分辨率重建。
原文PDF文件:
Assessment of supervised machine learning methods for fluid flows.pdf
文五:
流体力学深度强化学习研究进展
摘要:
在过去的几年里,流体力学界对深度强化学习技术的兴趣迅速增长,导致该主题的参考文献越来越多。由于其解决复杂决策问题的能力,深度强化学习尤其成为执行流量控制的一种有价值的工具,但最近的出版物也宣传了其他应用的巨大潜力,如形状优化或微流体。本工作对现有文献进行了详尽的综述,是我们之前对该主题综述的后续工作。贡献按应用领域重新组合,并在算法和技术选择方面进行比较,如状态选择、奖励设计、时间粒度等。基于这些比较,得出了关于当前最先进技术的一般结论,并概述了未来改进的前景。
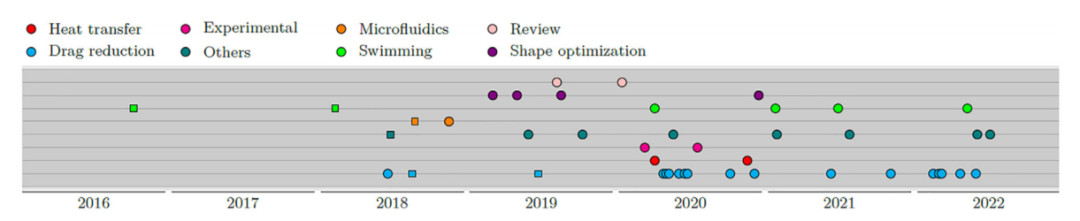
图:流体动力学深度强化学习的最新出版物时间表。颜色表示不同的应用领域。请注意,我们在这里保留了第一次印刷前发表的日期,而不是在同行评审期刊上最终发表的日期。事实上,深度强化学习社区的快速发展使预打印变得尤为重要,有时还得到代码发布的支持。方形符号表示我们之前的综述中包含的参考文献。
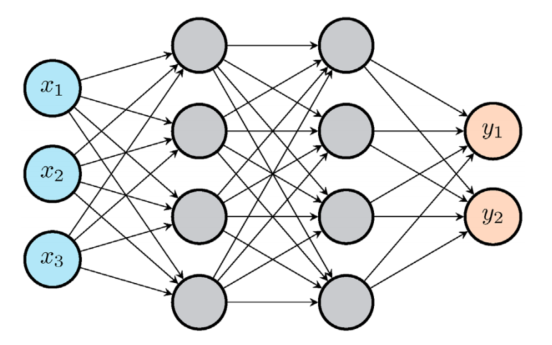
图:具有两个隐藏层的全连接神经网络。

图:深度强化学习环境中遇到的不同类型的延迟。动作前延迟对应于状态收集时刻和对环境应用动作时刻之间存在的时间延迟(在数值环境的情况下不存在这种类型的延迟)。作用后延迟被定义为作用于环境的时刻与作用在系统动力学中完全有效的时刻之间存在的时间延迟。
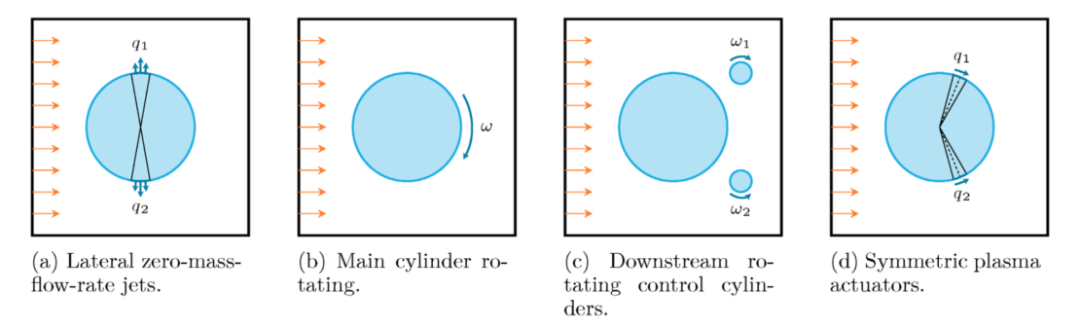
图:深度强化学习文献中代表的不同减阻方法,在二维圆柱体周围中等雷诺数流动的背景下。(a) 零质量流量喷嘴用于在障碍物的侧面吹送或抽吸流体。可能有两个或四个,可能是倾斜的。(b) 将角速度应用于障碍物,以改变下游流量并减少阻力。(c) 放置在障碍物下游的两个小控制缸被赋予角速度,以稳定主缸的脱落。(d) 控制两个对称的等离子体致动器以改变流分离点附近的流体流动,从而减少障碍物上的整体阻力。
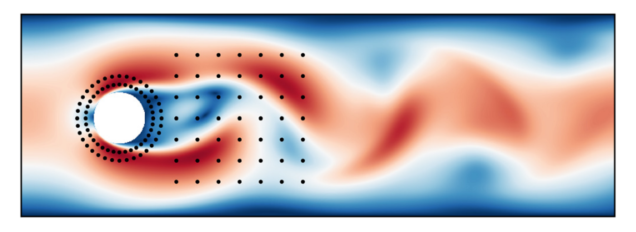
图:在中等雷诺数的二维圆柱体上应用减阻的情况下,用于观测收集的典型探针阵列。

图:通过具有三个自由参数(左)、九个自由参数和12个自由参数的直接形状优化获得的最佳升阻比的形状(右)。
原文PDF文件:
a review on deep reinforcement learning for fluid mechanics-an update.pdf
计算机技术在科学&技术&工程&数学中得到了广泛的应用,力学方面,计算机技术成为了科学的第四次革命性技术,现在基于计算机的数据科学已经逐步成为力学等其他科学发现的第四范式。人工智能、大数据、数字孪生等概念已经逐步成为当今时代的主题。智能制造、智能算法、数据驱动力学、大语言模型、自动驾驶在当今社会展现出巨大潜力,吸引了大量的研究人员。同时高性能显卡和多核中央处理器的出现为大规模数值模型的高性能计算提供了强大算力。然而因为该领域的论文较多,涉及内容较广,需要的知识量较大,不仅需要力学,数学,物理的知识,还需要计算机、数据科学、大数据分析的知识。