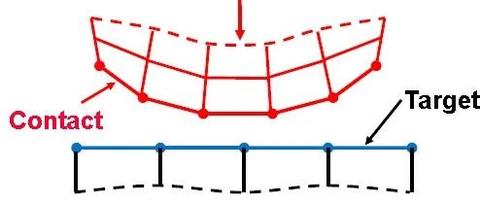
Workbench – Mechanical接触简介
很多新手使用workbench时候对接触的方式以及方法使用存在疑惑,故机电君在这里对其进行简单介绍A. 接触基本概念B. 接触公式C. 刚度和渗透E. Pinball 区域F. 对称与反对称G. 接触结果后处理A. 基本概念接触:• 两独立表面相互接触并相切,则称之为接触• 一般物理意义上, 接触的表面包含如下特性:– 不会渗透– 可传递法向压缩力和切向摩擦力– 通常不传递法向拉伸力 • 可自由分离和互相移动• 接触是状态改变非线性. 也就是说, 系统刚度取决于接触状态, 即part之间是接触或分离接触区域如何计算:• 物理上,接触体间不相互渗透. 因此, 程序必须建立两表面间的相互关系以阻止分析中的相互穿透– 程序阻止渗透, 称为强制接触协调性– Workbench Mechanical提供几种不同接触公式来在接触界面强制协调性B. 接触公式对非线性实体表接触, 可使用罚函数或增强拉格朗日公式:– 两种方法都是基于罚函数方程:– 一力F(normal), 一刚度的k(normal),度越高,穿透量x(penetration)越小,如下图所示;– 对于理想无限大的knormal , 零穿透. 但对于罚函数法,这在数值计算中是不可能,但是只要xpenetration 足够小或可忽略,求解的结果就是精确的• Pure Penalty 和Augmented Lagrange 方法的区别就是后者加大了接触力(压力)的计算:• 因为额外因子λ, 增强的Lagrange 方法对于罚刚度k(normal )的值变得不敏感• 另外可利用方法是拉格朗日乘子公式:– 增强拉格朗日方法增加了额外的自由度(接触压力)来满足接触协调性. 因此, 接触力(接触压力) 作为一额外自由度直接求解,而不通过接触刚度和穿透计算得到• 此方法可以得到0或接近0的穿透量• 不需要压力自由度法向接触刚度(零弹性滑动)• 需要直接求解器,这要消耗更多的计算代价• 使用Normal Lagrange方法 会出现接触扰动– 如果不允许渗透(左图), 在Gap为0处,无法判断接触状态是开放或闭合(如阶跃函数). 有时这导致收敛变得更加困难,因为接触点总是在open/closed中间来回振荡,这就称为接触扰动(chattering)– 如果允许一个微小的渗透(右图), 收敛变得更加容易,因为接触状态不再是一个阶跃变化• 另外值得一提的是算法不同,接触探测不同:– Pure Penalty 和Augmented Lagrange 公式使用积分点探测. 这导致更多的探测点。(在左侧的例子中有10个)– Normal Lagrange 和MPC 公式使用节点探测(目标法向). 这导致更少的探测点。(在右侧的例子中有6个)– 节点探测在处理边接触时会稍微好一些,但是,通过局部网格细化,积分点探测也会达到同样的效果• 对于特定的“绑定”和“不分离”两个面间的接触类型,可用多点约束(MPC) 算法– MPC 内部添加约束方程来“联结”接触面间的位移– 这种方法不基于罚函数法或Lagrange乘子法.它是直接处理绑定接触接触区域相关接触面的方式– MPC算法支持大变形效应• 前面所提到的选项是针对法向接触的. 如果定义了“friction” 或“rough/bonded”接触, 类似的情况会出现在切向方向– 同不 穿透条件类似,如果在切向上,两个实体是“粘结在一起的” ,这两个实体不应该相互滑动– 切向总是用“罚函数” 算法– 切向接触刚度和滑动距离是类似的参数:这里,x(sliding) 在粘着时理想值为零, 尽管penalty方法中允许少量滑动– 不同于法向接触刚度, 切向接触刚度不能由用户直接改变• Workbench Mechanical接触公式总结见下表:1 切向接触刚度不能由用户直接输入– Normal Lagrange” 法是因为拉格朗日乘子公式用于法线方向而罚函数方法用于切线方向而得名的• 下表列出不同接触算法的比较,用“+”表优势,“-”表劣势:C. 接触刚度和渗透• 尽管Workbench-Mechanical 默认为“Pure Penalty”, 但在大变形问题的无摩擦或摩擦接触中建议使用“Augmented Lagrange”– 增强拉格朗日公式增加了额外的控制自动减少渗透• “法向刚度” 是之前解释的接触罚刚度knormal, 只用于“PurePenalty” 或“Augmented Lagrange”– 这是一个相对因子. 一般变形问题建议使用1.0. 对弯曲支配情况,如果收敛困难的话,小于0.1的值可能是有用的– 接触刚度在求解中可自动调整. 如果收敛困难,刚度自动减小• 法向接触刚度knormal 是影响精度和收敛行为最重要的参数– 刚度越大,结果越精确,收敛变得越困难– 如果接触刚度太大,模型会振动,接触面会相互弹开• 法向刚度WB-Mechanical系统默认自动设定– 用户可以输入“法向刚度因子Normal Stiffness Factor” (FKN) 它是计算刚度代码的乘子.因子越小,接触刚度就越小• 默认FKN =10 (对于绑定和不分离的接触)• 默认FKN=1.0 (其他形式接触)• 接触问题法向刚度选择一般准则:– 体积为主的问题: 用“Program Controlled” 或手动输入“Normal StiffnessFactor” 为“1”– 弯曲为主的问题: 手动输入“Normal Stiffness Factor” 为“0.01” 到“0.1”之间的数值• 用户也可在每次平衡迭代或子步间更新接触刚度• 如下例子显示接触刚度的影响:从上表容易看出,接触刚度因子越小,穿透量越大. 然而,它也使求解更快速/容易收敛(更少的迭代)• 对绑定接触, Workbench-Mechanical 默认使用Pure Penalty 公式和大 法向刚度– 因为接触刚度高导致很小或可忽略的穿透,可得到精确的结果– 对绑定接触,MPC 算法是另一个好的选择,因为它有许多好的特征• 对无摩擦或摩擦接触,考虑使用Augmented Lagrange 或NormalLagrange 方法– 由于其良好的特性和灵活性,推荐使用Augmented Lagrange 方法– 如果用户不想考虑法向刚度同时要求零穿透,可以使用Normal Lagrange 方法.但必须使用直接求解器(Direct Solver) ,这也许会限制求解模型大小E. Pinball 区域• Pinball 区域是一接触单元参数,用于区分远场开放和近场开放状态.可以认为是包围每个接触探测点周围的球形边界– 如果一个在目标面上的节点处于这个球体内,WB-Mechanical就会认为它“接近” 接触,而且会更加密切地监测它与接触探测点的关系(也就是说什么时候及是否接触已经建立). 在球体以外的目标面上的节点相对于特定的接触探测点不会受到密切监测– 如果绑定接触的缝隙小于Pinball 半径, WB-Mechanical仍将会按绑定来处理那个区域• Pinball 区域有以下几个用处:– 为接触计算提供高效率的运算. 在搜寻给定接触区域可能发生接触的单元时,Pinball 区域区分“近” 和“远” 开接触– 决定绑定接触确定允许缝隙的大小. 如果使用MPC 公式, Pinball区域也决定多少个节点包含在MPC 方程中– 确定可以包含的初始穿透深度• 对于每个接触探测点有三个选项来控制Pinball区域的大小– 程序选择(默认)- pinball 区域通过其下的单元类型和单元大小由程序计算给出– 自动探测数值- pinball区域等于全局接触设置的容差值• 确保通过自动接触探测创建的接触对有一个pinball半径包含了接触面和目标面• 接触自动探测区比程序控制的pinball值要大时推荐该选项。这种情况下,自动探测的接触在求解开始时可能不是初始闭合– 半径–用户手动为pinball区设置数值• 为便于确认,“Auto Detection Value” 自动探测值或者用户定义的Pinball “半径” 在接触区域以一个球的形式出现• 接触面和目标面的内部指定非常重要– 在WB-Mechanical中,接触面和目标表面都会显示在每一个“ContactRegion” 中。接触面以红色表示而目标面以蓝色表示– 接触和目标面指定了两对相互接触的表面• WB-Mechanical 默认用对称接触行为– 这意味着接触面和目标面不能相互穿透• 如果用户愿意, 非对称行为也可用:– 对于非对称或自动非对称行为,仅仅限制接触面不能穿透目标面.– 自动非对称行为中,接触面和目标面的指定可以在内部互换• 虽然一再强调表面不能相互穿透,但对于罚函数方法,小的穿透仍可能出现• 对于非对称行为, 接触面的节点不能穿透目标面. 这是需要记住的十分重要的规则。请考虑以下问题:– 如左图所示,顶部红色网格是接触面的网格划分。节点不能穿透目标面,所以接触建立正确– 如图所示,底部红色网格是接触面而顶部是目标面。因为接触面节点不能穿透目标面,发生了太多的实际渗透• 对非对称行为,由于接触探测点的位置,积分点探测可允许边缘少许渗透– 下图说明了这种情况:• 一方面, 如果使用积分点探测会有更多接触探测点所以每种接触探测方 法都有优点和缺点• 下面对非对称行为接触表面的正确选择给出选择指导:– 如果一凸的表面要和一平面或凹面接触,应该选取平面或凹面为目标面.– 如果一个表面有粗糙的网格而另一个表面网格细密,则应选择粗糙网格表面为目标面– 如果一个表面比另一个表面硬,则硬表面应为目标面– 如果一个表面为高阶而另一个为低阶,则低阶表面应为目标面– 如果一个表面大于另一个表面,则大的表面应为目标面• 只有Pure Penalty 和Augmented Lagrange 公式实际支持对称行为.• Normal Lagrange 和MPC 要求非对称行为• 方程的本质决定了对称行为造成了对模型在数学上的过度约束, 因此,当选择对称行为时使用自动对称行为– 上一张PPT在任何情况下选择了非对称接触时,接触面和目标面的选择的通用规则,用户遵循这些规则总是正确的• 对称行为:– 更容易建立(Workbench-Mechanical默认的)– 更大计算代价– 解释实际接触压力这类数据将更加困难• 可以报告两对面上结果• 非对称行为:– Workbench-Mechanical可以自动的设置(Auto-Asymmetric) 或…– 用户手动指定合适的接触和目标面• 选择不正确定接触和目标面会影响结果– 观察结果容易而且直观.所有数据都在接触面上G. 接触结果• 对称行为,将报告接触和目标面上的结果• 对任何非对称行为,只有接触面上的结果• 当检查Contact Tool工作表时,用户可以选择接触或目标面来观察结果– 对自动非对称行为,报告接触面或目标面上结果– 对非对称行为,目标面上的结果为零• 例如,在下例中使用了对称行为和Normal Lagrange 算法– 这导致了自动非对称行为. 因为是自动的,Simulation 也许会互换接触和目标面– 在观察Contact Tool 结果时,接触面上的结果为零而目标面上显示真实的接触压力• 在另一种情况下,使用“Augmented Lagrange” 公式和对称行为– 这导致对称行为,因此两个表面不能相互穿透– 这样,结果将会同时在接触和目标面上显示出来。这意味着真实的接触压力是两个结果的平均值网络整理,仅作内部分享,禁止商用来源:机电君