仿真笔记——ANSYS Workbench连接关系详解与操作步骤

本文摘要:(由ai生成)
本文介绍了ANSYS Workbench中的多种连接关系,包括接触、网格接触、关节连接、梁连接、弹簧、轴承、点焊和末端释放等,用于模拟复杂机械系统的相互作用。文章详细说明了网格接触和关节连接的创建过程,并介绍了弹簧、梁连接、轴承和点焊连接的应用。这些连接关系有助于在ANSYS Workbench中进行有效的结构分析和动力学仿真,提高设计的准确性和可靠性。通过使用这些连接关系,工程师可以更精确地模拟机械系统的行为,优化设计方案,提高产品性能。
ANSYS Workbench连接关系
当几何体存在多个零部件时,需要确定零部件之间的相互关系,在Mechanical中可以创建的连接关系如下:

Connections选项
1 网格接触
网格接触可以帮助连接不连续的体之间的网格划分,如以下实例。
实例:两块面体间隙为0.5mm。使用网格接触使它们接触。

面体间隙
Step1 生成网格。
Step2 创建网格接触集 合:创建网格接触的工具不是在Connetions工具条内,而是在Mesh工具条呢。点击分析树中的Mesh,工具栏出现Mesh工具条,选择Mesh Edit——Mesh Connection Group,在分析树中便创建了Mesh Edit及其下属的Mesh Connection Group。

创建网格接触
Step3 设置接触:点击Mesh Edit进行细节设置,Generate Automatic Connection On Refresh(在刷新时自动生成连接)改为Yes。

Mesh Edit细节设置
点击Mesh Connection Group进行细节设置,Geometry默认为All Bodies(需要先划分网格),修改Tolerance Slider到-100,使Tolerance Value值大于0.5。若拖到-100,其值仍小于0.5,可将Tolerance Type改为Value,然后直接修改Tolerance Value的值为0.6。

Mesh Connection Group细节设置
Step4 自动生成网格接触:右击分析树中的Mesh Connection Group——Detect Connections(探测连接),其下属便生成了两对网格接触,检查是否正确,此处只需要一对,删除其中一对。
右击分析树中的Mesh Connection Group——Generate,网格连接创建成功。

生成网格连接
最后点击分析树的Mesh,可以发现两个面体已经通过网格连接为一体。
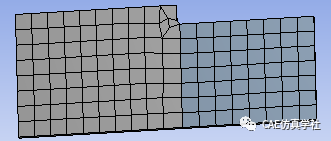
网格连接结果
注:也可以通过手动方式创建网格接触:在Step2中选择Manual Mesh Connections,无需进行Step3的设置,只需要在Mesh Connection的细节设置中指定主副几何,同样需要将Tolerance Value设置为大于缝隙值。

手动创建网格连接
2 关节连接Joint
Joint核心即为MPC接触形式,采用约束方程定义实体之间或者实体与大地之间的连接关系。
分为固定Fixed、旋转Revolute 、圆柱Cylindrical 、平移Translational 、 槽Slot 、万向节 Universal 、球Spherical 、 平面Planar、套管Bushing、通用General 、点面连接Point on Curve。具体含义将在刚体运动学一文中解释。
3 弹簧Spring和梁Beam接触
Spring和Beam接触,用来模拟弹簧和梁的连接,以定义相应的接触关系。两者的创建方法相同,以下以创建弹簧接触为例。
实例:长条左端施加可转动的约束,上端面时间弹簧接触,在重力的影响下求变形。

Step1 创建弹簧。右击分析树的Connections——Insert——Spring,便创建了待定义的弹簧接触。对弹簧接触进行细节设置:Scope设置为Body-Ground,即几何体与地面连接,此处的地面为抽象概念,表示弹簧锚在不动的地方。其余设置如下图。

弹簧接触设置
Step2 添加约束条件。以远端位移约束左端面,只允许竖直平面内的转动,添加竖直向下的重力加速度。计算结果如下:
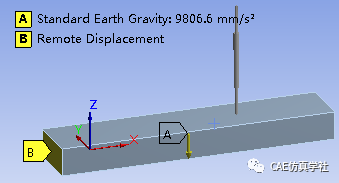
边界条件设置
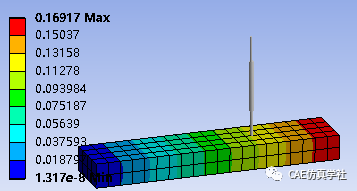
计算结果
4 轴承Bearing
轴承接触为一个2D弹性单元,可用来限制旋转部件的相对运动和转动。定义轴承时,需要设置刚度矩阵与阻尼矩阵。其含有如下图:

轴承径向刚度与阻尼(平面)
5 点焊Spot Weld
点焊连接用来连接不同的零件,其作用与绑定接触一样,但是对象只能选择点。点焊在不同零件直接传递载荷。
如下图将两个方块4个顶点一对一点焊,再施加底面的固定与横向的拉力,位移结果如下:

点焊