面向数字孪生的动态数据驱动建模与仿真方法

致力于数字孪生体技术的研究与发展
通过解决方案和工程化应用造福人类
来源:系统工程与电子技术
作者:王鹏 杨妹等
摘 要
信息物理系统(cyber physical system,CPS)是支撑信息化和工业化深度融合的综合技术体系,传统的建模与仿真方法难以满足其应用需求。因此,提出面向数字孪生的动态数据驱动建模与仿真方法,通过随机有限集对CPS中的物理实体和传感器进行数据驱动建模,并使用基于贝叶斯推理的预测与校正过程支持数据驱动的仿真模型运行。该方法能够很好地实现数字孪生机制下虚实结合的仿真运行,并实现数据驱动的CPS仿真模型解算,通过以实利虚的方式有效提高了仿真结果的准确性和可信性。最后,通过水面舰艇作战应用案例,验证了该方法的可行性和有效性。
关键词:信息物理系统;动态数据驱动仿真;随机有限集;数字孪生
0 引 言
随着美国工业互联网、德国工业4.0、中国制造2025等国家层面制造发展战略的提出,信息物理系统(cyber physical system,CPS)已经成为世界各国抢占全球新一轮产业竞争制高点的优先议题和核心技术[1-4]。CPS通过集成先进的感知、计算、通信、控制等信息技术和自动控制技术,构建了物理空间与信息空间中人、机、物、环境、信息等要素相互映射、适时交互、高效协同的复杂系统,实现系统内资源配置和运行的按需响应、快速迭代和动态优化[5-8]。
数字孪生本质上是物理对象的仿真模型,该模型可以通过接收来自物理对象的数据而实时演化,从而与物理对象在全生命周期保持一致[9-11]。数字孪生作为实现物理空间与虚拟空间交互融合的最佳途径,受到国内外的高度关注。美国Gartner公司连续3 年(2017年—2019年)将数字孪生技术列入当年十大战略技术趋势之中,认为其具有巨大的创造性潜力。2017年11月,洛克希德·马丁公司将数字孪生列为未来国防和航天工业六大顶尖技术之首。2017年12月,世界智能制造大会将数字孪生列为世界智能制造十大科技进展之一[11-16]。
数字孪生可支撑分析、预测、决策等仿真相关应用,并将仿真结果反馈给物理对象,从而帮助对物理对象进行优化和决策[17-19]。数字孪生理念为信息世界和物理世界之间的交融提供了重要参考,代表了最新的仿真技术,数字孪生的实现对仿真行业提出了更高的要求,极大地推进了仿真行业的发展[20-23]。目前数字孪生技术仍处于发展阶段,相应的理论与技术研究成果较少,可供参考的案例与应用成果更是少之又少。数字孪生技术强调虚实之间的双向实时交互,包括以虚控实和以实利虚两个方面内容,本文重点研究以实利虚的相关内容,即如何利用真实系统的数据来更好地进行仿真分析。
随着传感器技术、网络通信技术等相关技术的进步,可以很容易地获取来自真实系统的实时观测数据[24-25]。这使得动态数据驱动仿真(dynamic data driven simulation,DDDS)成为一种新的仿真范式。在这种范式中,虚拟仿真系统将受到来自于真实系统实时观测数据的持续影响[26]。
为了实现数字孪生中的以实利虚,需要借助DDDS技术,利用来自现实世界的测量数据并动态调整仿真模型的状态,以防止仿真系统和真实CPS之间的差异不断扩大。该问题产生的原因有两方面:一方面是真实CPS的高度动态性和不确定性,所发生的变化是不能预知的,基于先验知识的计划方案在某些未知因素的作用下很可能不再适用,需要实现方案的实时动态生成。为了适应动态变化的CPS,需要利用贝叶斯理论将实时的变化信息融合到仿真系统中,使仿真系统适应真实CPS 的动态性和不确定性;另一方面是不精确的仿真数据和模型,由于CPS的动态性、复杂性和不确定性,获得的数据信息大部分都存在误差。除了数据误差外,由于仿真模型对真实世界的某些方面进行了简化,不可避免地将会产生误差。正是由于这些误差,仿真模型的预测结果几乎肯定与实际CPS的真实状态之间存在差异。
结合CPS的建模与仿真应用需求,以及数字孪生的技术特点,本文提出动态数据驱动建模与仿真方法,主要是把以仿真模型形式存在的关于真实CPS的先验知识与以测量数据形式存在的关于真实CPS的新知识结合起来,得到对当前真实CPS的更精确描述,动态校正仿真系统的模型状态。然后,利用校正后的状态作为仿真模型后续仿真运行的输入。该方法可以理解为将仿真模型和真实测量数据融合的过程,其目的是提高仿真结果的准确性和可信性。该方法利用随机有限集(random finite set,RFS)对仿真状态和测量数据进行建模,并构建基于RFS的仿真模型和传感器模型。最后,利用贝叶斯推理方法[27-29]来实现在仿真运行过程中融合实时测量数据,具体包含预测和校正两个环节。
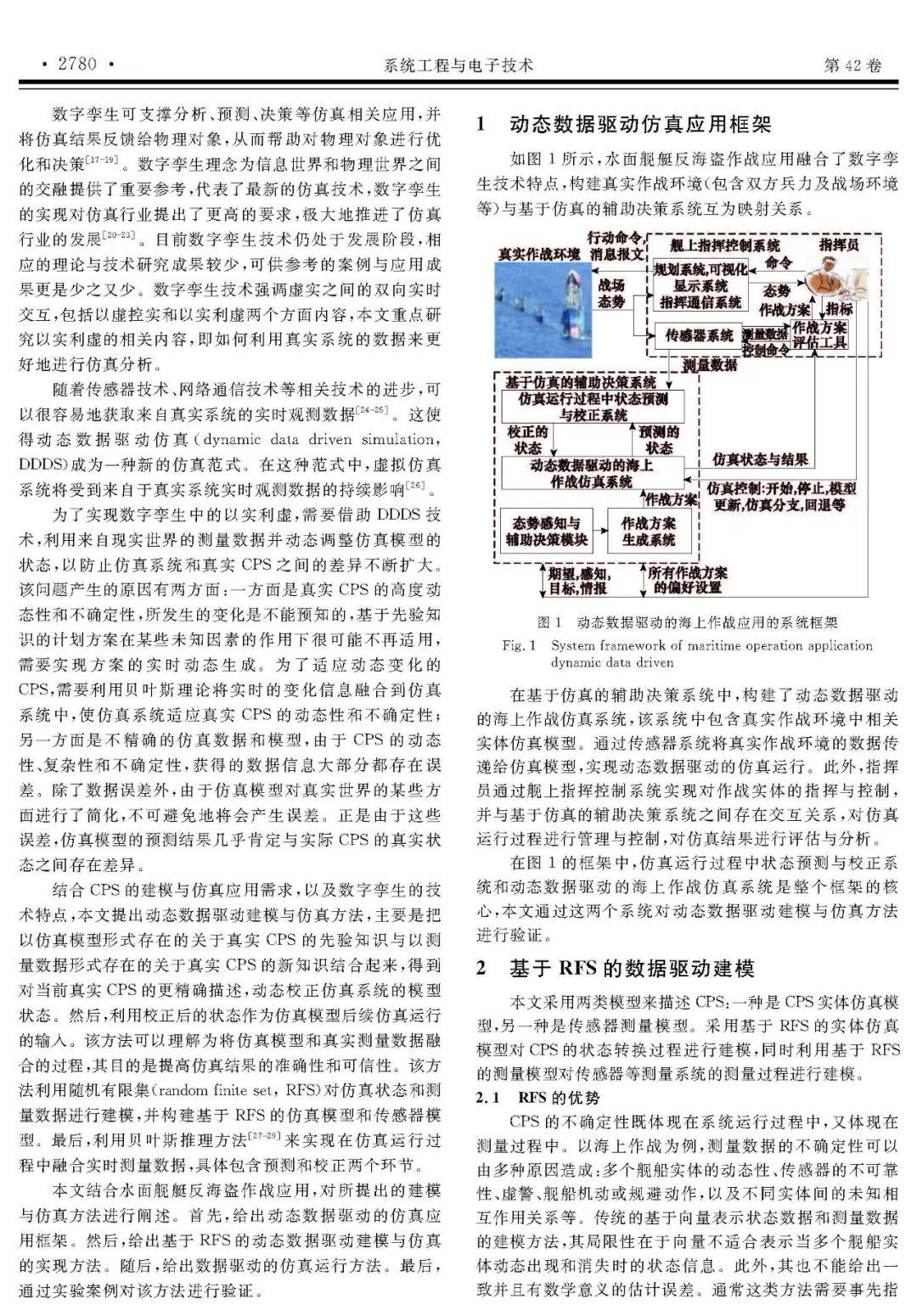
本文结合水面舰艇反海盗作战应用,对所提出的建模与仿真方法进行阐述。首先,给出动态数据驱动的仿真应用框架。然后,给出基于RFS的动态数据驱动建模与仿真的实现方法。随后,给出数据驱动的仿真运行方法。最后,通过实验案例对该方法进行验证。
全文内容: