嵌入式开发必懂的CAN总线知识

嵌入式开发必懂的CAN总线知识
嵌入式的工程师一般都知道CAN总线广泛应用到汽车中,其实船舰电子设备通信也广泛使用CAN,随着国家对海防的越来越重视,对CAN的需求也会越来越大。
概述

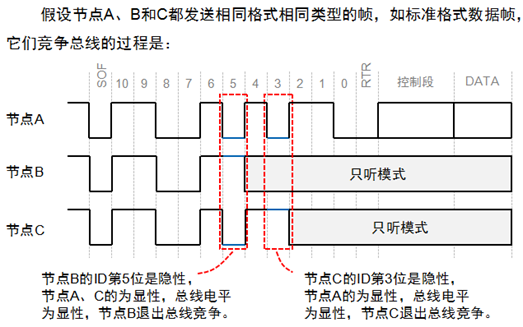
CAN总线标准

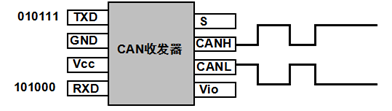

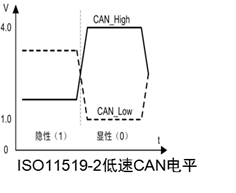
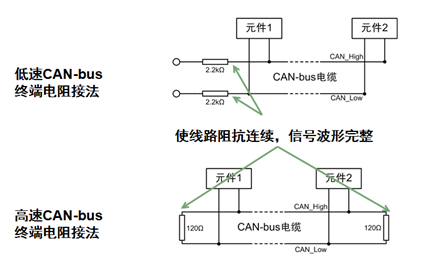
物理层



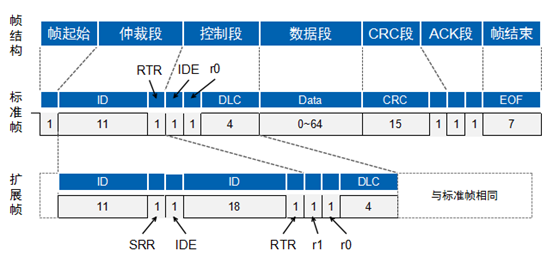




CRC错误:发送与接收的CRC值不同发生该错误; 格式错误:帧格式不合法发生该错误; 应答错误:发送节点在ACK阶段没有收到应答信息发生该错误; 位发送错误:发送节点在发送信息时发现总线电平与发送电平不符发生该错误; 位填充错误:通信线缆上违反通信规则时发生该错误。





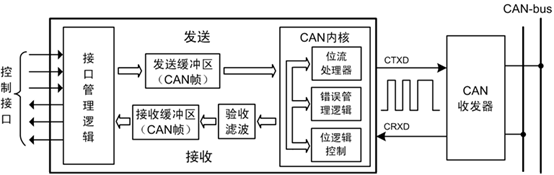
CAN协议应用层概述





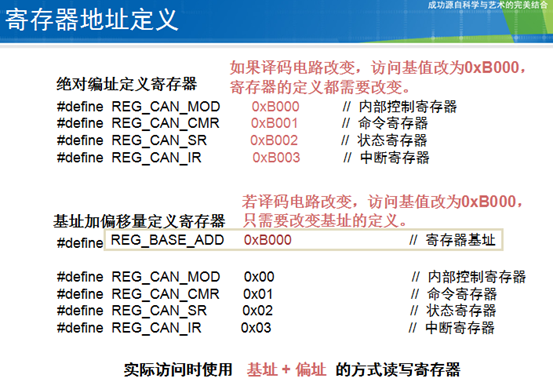
#define REG_BASE_ADDR 0xA000 // 寄存器基址
unsigned char *SJA_CS_Point = (unsigned char *) REG_BASE_ADDR ;
// 写SJA1000寄存器
void WriteSJAReg(unsigned char RegAddr, unsigned char Value)
{
*(SJA_CS_Point + RegAddr) = Value;
return;
}
// 读SJA1000寄存器
unsigned char ReadSJAReg(unsigned char RegAddr)
{
return (*(SJA_CS_Point + RegAddr));
}

……
for (i=0; i<len; i++)
{
WriteSJAReg(RegAdr + i, ValueBuf[i]);
}
……
……
for (i=0; i<len; i++)
{
ReadSJAReg(RegAdr + i, ValueBuf[i]);
}
……
#ifndef __CONFIG_H__ // 防止头文件被重复包含
#define __CONFIG_H__
#include <8051.h> // 包含80C51寄存器定义头文件
#include "SJA1000REG.h" // 包含SJA1000寄存器定义头文件
// 定义取字节运算
#define LOW_BYTE(x) (unsigned char)(x)
#define HIGH_BYTE(x) (unsigned char)((unsigned int)(x) >> 8)
// 定义振荡器时钟和处理器时钟频率(用户可以根据实际情况作出调整)
#define OSCCLK 11059200UL
// 宏定义MCU的时钟频率
#define CPUCLK (OSCCLK / 12)
#endif // __CONFIG_H__





char SetSJASendCmd(unsigned char cmd)
{
unsigned char ret;
switch (cmd)
{
default:
case 0:
ret = SetBitMask(REG_CAN_CMR, TR_BIT); //正常发送
break;
case 1:
ret = SetBitMask(REG_CAN_CMR, TR_BIT|AT_BIT); //单次发送
break;
case 2:
ret = SetBitMask(REG_CAN_CMR, TR_BIT|SRR_BIT);//自收自发
break;
case 0xff:
ret = SetBitMask(REG_CAN_CMR, AT_BIT);//终止发送
break;
}
return ret;
}
unsigned char SJA_CAN_Filter[8] =
{
// 定义验收滤波器的参数,接收所有帧
0x00, 0x00, 0x00, 0x00,
// ACR0~ACR3
0xff, 0xff, 0xff, 0xff
// AMR0~AMR3
};
unsigned char STD_SEND_BUFFER[11] =
{
// CAN 发送报文缓冲区
0x08, // 帧信息,标准数据帧,数据长度 = 8
0xEA, 0x60, // 帧ID = 0x753
0x55, 0x55, 0x55, 0x55, 0xaa, 0xaa, 0xaa, 0xaa // 帧数据
};
void main(void) // 主函数,程序入口
{
timerInit();// 初始化
D1 = 0;
SJA1000_RST = 1; // 硬件复位SJA1000
timerDelay(50); // 延时500ms
SJA1000_RST = 0;
SJA1000_Init(0x00, 0x14, SJA_CAN_Filter); // 初始化SJA1000,设置波特率为1Mbps
// 无限循环,main()函数不允许返回
for(;;)
{
SJASendData(STD_SEND_BUFFER, 0x0);
timerDelay(100); // 延时1000ms
}
}


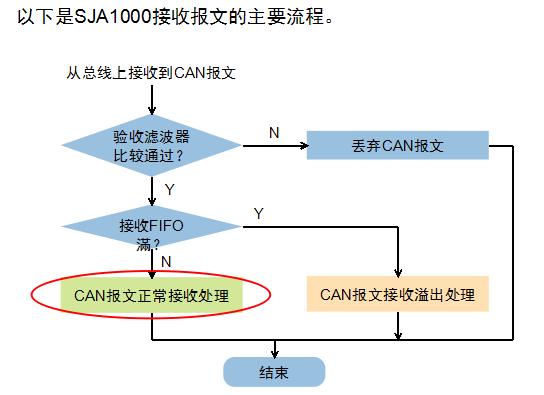
MCU可以通过查询或中断的方式确定SJA1000接收到报文后读取报文。
登录后免费查看全文
著作权归作者所有,欢迎分享,未经许可,不得转载
首次发布时间:2024-03-10
最近编辑:8月前

签名征集中

相关推荐
最新文章
热门文章
