STAR CCM+ SPH案例:齿轮箱润滑
- 作者优秀
- 优秀教师/意见领袖/博士学历/特邀专家
- 平台推荐
- 内容稀缺

齿轮机构需要充足的润滑以实现长期最佳性能和效率。STAR-CCM+ 2402提供了光滑粒子流体动力学(SPH)模型,利用该模型可以模拟润滑剂在齿轮机构各部件周围的流动,并确定是否需要进行调整。
光滑粒子流(Smoothed Particle Hydrodynamics,SPH )是一种无网格方法,采用拉格朗日粒子为基础的方法来模拟流体动力学。这种数值方法克服了传统模型中与网格相关的限制,尤其适用于模拟具有移动部件的快速动态复杂流体流动。
1 问题描述
本案例演示设置SPH仿真工作流程,以预测齿轮箱中的流场、齿轮润湿情况以及齿轮扭矩。案例将模拟一个油浴润滑系统,在这个系统中,齿轮部分浸没于润滑剂内,由于齿轮的旋转,润滑剂会在齿轮齿上形成润滑膜。如下图所示。

此齿轮箱为封闭系统,内部不存在流动边界。啮合的齿轮置于油浴中并以高速反向旋转。小齿轮转速为1222 rpm,大齿轮转速为-594.5 rpm。
仿真开始时,腔体内的油位高度为0.02米。油被模拟为不可压缩液体,其密度为845.1 kg/m³,动力粘度为0.074 Pa.s。采用固定大小的颗粒离散化油液,其颗粒直径为1毫米。通过对齿轮表面区域内的齿轮部件应用直接旋转运动值来规定齿轮的旋转。案例使用自适应时间步长方法,根据网格尺寸和计算速度动态调整时间步长大小。仿真计算时间为0.5秒。
2 导入几何
启动双精度版本的STAR-CCM+并创建一个新的Simulation。
点击 Import Surface Mesh 按钮,在弹出的Open对话框中选中以下文件,然后点击 Open:
housing.stl gear.stl pinion.stl 在出现的 Import Surface Options 对话框中点击 OK 按钮导入几何模型
点击 Make Scenec Transparent 按钮以透明显示几何模型,如图所示。

3 将几何体部件分配至表面区域
需要将导入的几何体部件分配给一个表面区域,在此区域内创建一个单一边界,表示齿轮箱外壳、齿轮和小齿轮的壁面。
SPH(Smoothed Particle Hydrodynamics)是一种无网格拉格朗日方法,它不需要由表面约束形成的闭合体积拓扑结构来定义流体域。SPH将流体本身离散为相互作用的粒子云。因此只需要表面来定义边界条件。
将几何体部件分配至表面区域的步骤如下:
同时选中 Geometry > Parts 节点下的housing、gear 和 pinion 节点,右键单击其中一个选定节点,然后选择 **Assign Parts to Regions...**。

在 Assign Parts to Regions 对话框中,设置以下选项,点击 Apply 及 Close 按钮

此时模型树Regions节点下的子节点如图所示。

将 Region 节点重命名为 gearbox,并将 Boundary 节点重命名为 wall。 保存仿真。
4 选择物理模型
右键点击 Continua 节点并选择 New Physics Continuum。将 Continua > Physics 1 节点重命名为 Oil Continuum。

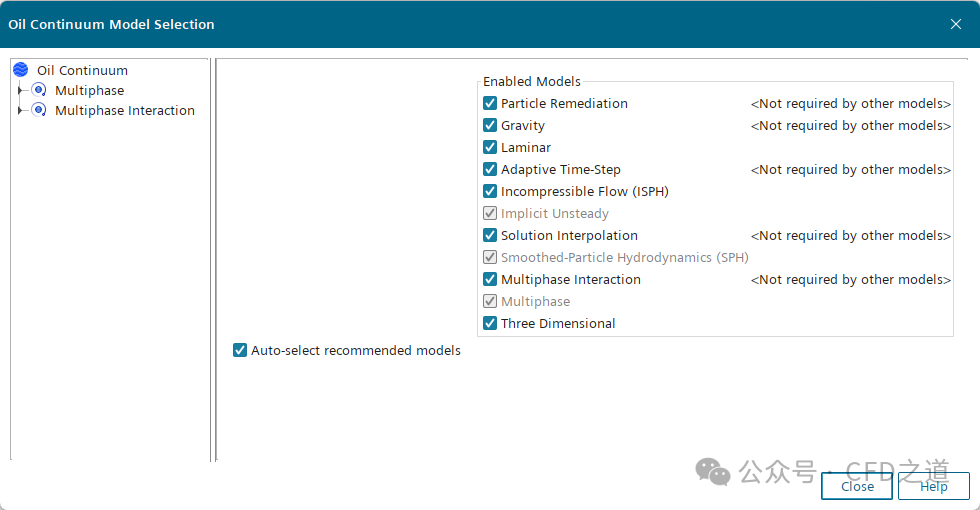
右键点击 Continua > Oil Continuum 节点并选择 Select Models... ,在弹出的对话框中按顺序选择以下模型
| Group Box | Model |
|---|---|
| Space | Three Dimensional |
| Material | Multiphase |
| Multiphase Model | Smoothed-Particle Hydrodynamics (SPH) |
| Viscous Regime | Laminar |
| Optional Models | Gravity |
| Optional Models | Particle Remediation |
模型选择完毕后如图所示。
选中 Regions > gearbox 节点,并将 Physics Continuum 设置为 Oil Continuum。

保存仿真。
5 定义油相
变速箱润滑油密度为845.1 kg/m³、粘度为0.074 Pa.s。
右键点击Continua > Oil Continuum > Models > Multiphase > Phases节点并选择New创建新节点,将新节点重命名为Oil Phase。

右键点击Oil Phase节点并选择**Select Models...**。

在Oil Phase Model Selection对话框中,在Materials组框内选择Liquid,然后点击Close。

将Oil Phase > Models > Liquid > H2O节点重命名为Oil。 定义 Oil > Material Properties 节点
| Node | Property | Setting |
|---|---|---|
| Density > Constant | Value | 845.1 kg/m^3 |
| Dynamic Viscosity > Constant | Value | 0.074 Pa-s |
保存仿真
6 设置油的初始条件
通常在使用SPH方法模拟流体流动时,需要以几何体部件的形式指定流体的初始形状和位置。这个几何体部件必须形成一个封闭表面。因此需要创建一个体积形状,在初始化过程中,该形状内部会生成直径为0.001米的油颗粒。颗粒的大小代表了流体的离散化程度。
以下流程图展示了创建油初始域的过程:

首先从一个与齿轮箱对齐的长方体开始,并将其高度设置为油的初始高度。接着用这个长方体与齿轮箱进行相交操作。从相交部分减去齿轮。
初始状态下,流体处于静止状态,压力为1bar。因此可以将速度和压力的初始条件保留为默认值。
创建描述油的初始形状和位置的体积形状。
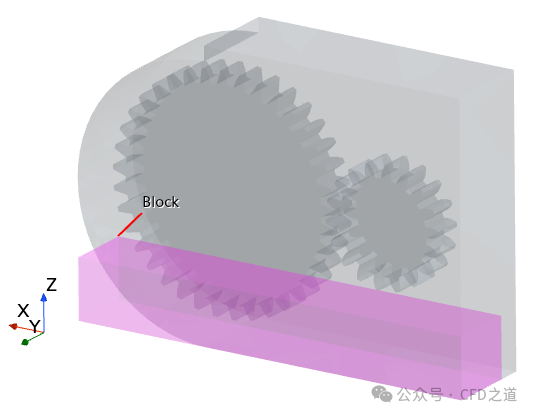
右键单击 Geometry > Parts 节点并选择 New Shape Part > Block。

在 Create Block Part 对话框中,在 Maximum and Minimum Coordinates 组框中,对于 Corner 2,将 Z 设置为 -0.025 m,然后点击 Create 和 Close。

图形窗口如图所示。
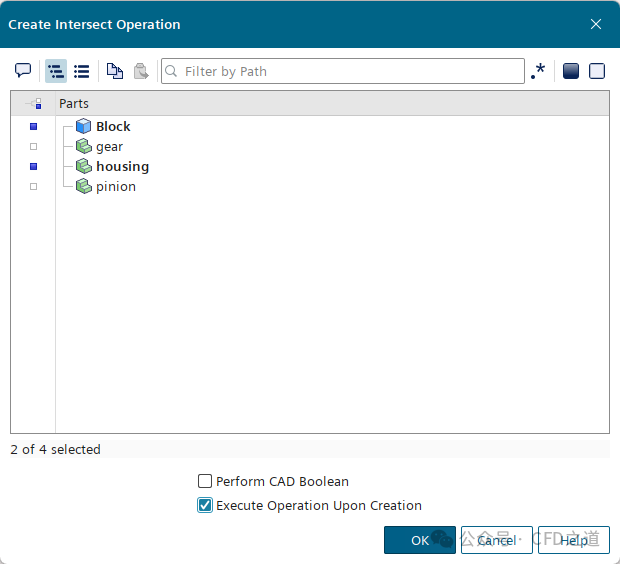
多选 Parts > Block 和 housing 节点,右键单击其中一个选定的节点,并选择 Create Mesh Operation > Boolean > Intersect。

在 Create Intersect Operation 对话框中,激活 Execute Operation Upon Creation,然后点击 OK。
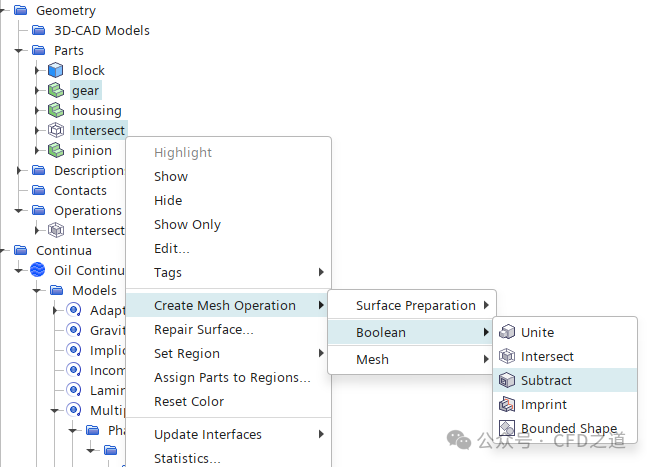
选择 Parts > Intersect 和 gear 节点,右键单击其中一个选定的节点,并选择 Create Mesh Operation > Boolean > Subtract。
在 Create Subtract Operation 对话框中,设置以下属性,然后点击 OK

将 Parts > Subtract 节点重命名为 Oil Initial。
选中模型树节点Oil Initial,可以查看该部分几何形状,如图所示。

为确保初始油部分与齿轮壳和齿轮的表面之间没有间隙,对部分进行压痕:
多选 Parts 节点下的housing,gear,和 Oil Initial 节点,右键单击其中一个选定的节点,并选择 Create Mesh Operation > Boolean > Imprint。

在 Create Imprint Operation 对话框中,点击 OK。

右键单击 Operations > Imprint 节点并选择 Execute。

在创建的初始油部分内生成油粒子。
编辑 Regions > gearbox > Physics Values 节点并设置以下属性:
| Node | Property | Setting |
|---|---|---|
| Particle Base Size | Value | 0.001 m |
| Particle Generation | Parts | Oil Initial |
如图所示。

保存模拟。
7 确定面法线的方向
为了确保流体颗粒仅在边界条件的内侧考虑封闭表面(如齿轮箱壳体)上的边界条件,需要调整该表面的法线方向,使其正向朝向内侧。为此,需要对包含壳体的部件反向设置面法线的方向。
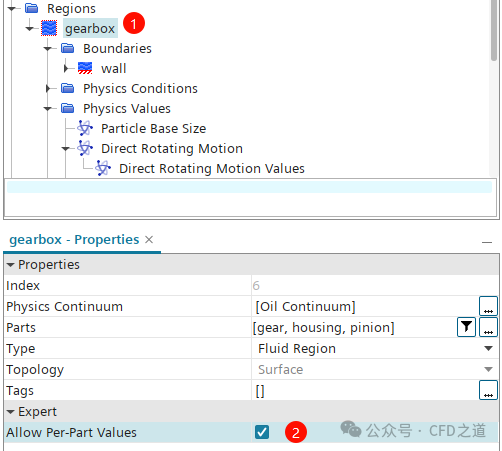
选择Regions > gearbox节点,并启用Allow Per-Part Values选项,允许对单个部件设定值。
右键选择Part Subgroupings > Subgrouping 1 > Subgroup 1节点。然后选择New,以创建一个新的子组。

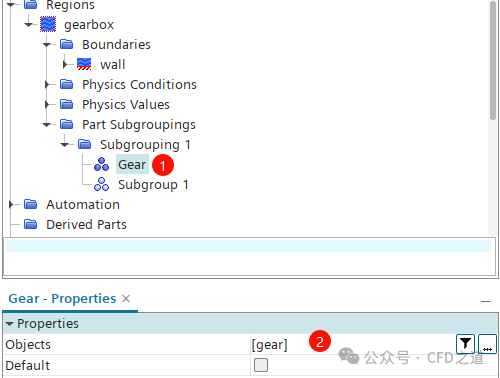
将新创建的Subgroup 2节点重命名为Gear。选择Gear节点,并将其Objects属性设置为gear,即将齿轮部分添加到这个子组。
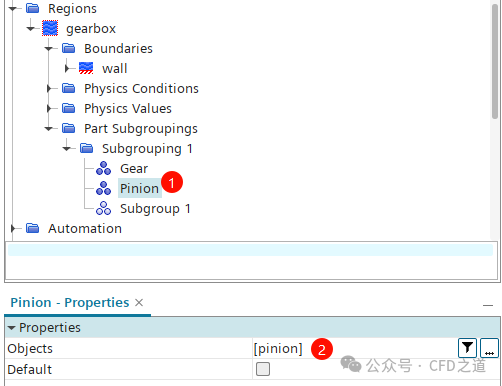
创建另一个子组,并赋予以下属性:
| Property | Setting |
|---|---|
| Name | Pinion |
| Objects | pinion |
如图所示。
将默认的Subgroup 1重命名为Housing,以便明确它现在包含的是壳体部件。

选择gearbox > Physics Values > Part Orientation节点,并激活Specify by Part Subgroup选项,开始按部件子组指定法线方向。

选择By Part Subgroup > Housing节点,并激活Reverse Orientation选项,反转壳体部件的面法线方向。

这样就成功地将齿轮箱壳体部分的面法线方向调整为面向内侧,从而确保流体模拟时对该部分边界条件的正确求解。
8 指定齿轮运动
小齿轮和大齿轮是反向旋转的,其中小齿轮的旋转速度为每分钟 1222 转。
齿轮的转速可计算为
选择 Regions > gearbox > Physics Values > Direct Rotating Motion 节点并激活 Specify by Part Subgroup。

编辑 Direct Rotating Motion > By Part Subgroup 节点并使用右手定则指定围绕旋转轴的旋转速率,如下所示:
| Node | Property | Setting |
|---|---|---|
| Gear > Direct Rotating Motion Values | ||
| Axis Direction | [0.0, 1.0, 0.0] | |
| Rotation Rate | -594.49 rpm | |
| Pinion > Direct Rotating Motion Values | ||
| Axis Direction | [0.0, 1.0, 0.0] | |
| Axis Origin | [-0.056, 0.0, 0.0] | |
| Rotation Rate | 1222 rpm |
9 提高模拟的稳健性和稳定性
在 SPH 模拟过程中,可能会发生个别油粒子穿过齿轮壳的封闭表面并逃离感兴趣的域。为了避免与跟踪这些异常值相关的计算开销,STAR-CCM+ 会在它们满足某个基于位置的标准时移除逃逸的粒子。可以用一个包围齿轮壳、齿轮和小齿轮的有界形状来定义这个标准。
1、创建一个有界形状
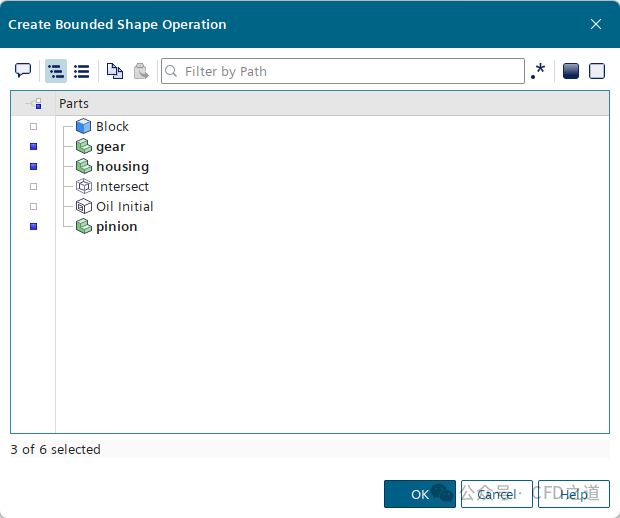
右键单击 Geometry > Parts > Operations 节点并选择 New > Boolean > Bounded Shape。

在Create Bounded Shapte Operation对话框中,选择 housing,gear,和 pinion,然后点击 OK。
右键单击 Operations > Bounded Shape 节点并选择 Execute。

选择 Parts > Bounded Shape 节点。在图形窗口中,选定的部分会被高亮显示,如下图所示。

2、定义移除穿过边界盒的粒子:
选择 Continua > Oil Continuum > Models > Particle Remediation 节点并激活 Enable Position-Based Removal。

选择 Particle Remediation > Position-Based Criterion 节点并将 Part 设置为 Bounded Shape。

保存模拟。
10 准备油液速度和体积分数可视化
需要准备齿轮上的油液速度和油液体积分数的可视化。此外还需要监控并绘制齿轮扭矩与物理时间的变化。
1、创建一个用于可视化油液速度的场景
右击 Scenes 节点并选择 New > Scalar。将 Scenes > Scalar Scene 1 节点重命名为 Oil Velocity。编辑 Oil Velocity 节点,并设置以下属性:
| Node | Property | Setting |
|---|---|---|
| Outline 1 | ||
| Opacity | 0.1 | |
| Surface | Activated | |
| Scalar 1 | ||
| Point Scale Mode | Particle Model | |
| Parts | Regions > gearbox | |
| Scalar Field | Velocity: Magnitude | |
| Auto Range | Off | |
| Max | 1.5 m/s | |
| Attributes | ||
| Annotations | Annotations | [Solution Time] |
点击 (Save-Restore-Select Views),然后选择 Views > +X +Y +Z > Up +Z。
2、创建一个用于可视化齿轮润湿性的场景
复 制 Scenes > Oil Velocity 节点,然后将其粘贴到 Scenes 节点上。将 Oil Velocity copy 节点重命名为 Oil Volume Fraction。 编辑 Oil Volume Fraction 节点,并设置以下属性:
| Node | Property | Setting |
|---|---|---|
| Scalar 1 | Contour Style | Smooth Filled |
| Parts | Parts | Parts> gear与Parts > pinion |
| Scalar Field | Function | Volume Fraction of Oil Phase |
| Attributes | ||
| Update | Trigger | Time Step |
| Update > Time-Step Frequency | Frequency | 5 |
3、创建一个齿轮扭矩绘图
右击 Reports 节点并选择 New > Flow / Energy > Moment。将 Moment 1 节点重命名为 Gear Torque。

选择 Gear Torque 节点,并设置以下属性:
| Property | Setting |
|---|---|
| Axis | [0.0, 1.0, 0.0] |
| Parts | Parts > gear |
右击 Gear Torque 节点并选择 Create Monitor and Plot from Report。 保存模拟。
11 运行模拟
默认情况下,SPH模拟过程中的时间步长会动态调整。在满足Courant-Friedrichs-Lewy (CFL) 稳定性条件的同时,时间步长尽可能地保持最大。该模拟运行的物理时间为0.5秒。
在这个模拟中,使用对流CFL和重力CFL时间步长提供器,这些提供器会根据对流和重力加速度的贡献来调整时间步长。只有在使用显式时间积分作为速度求解器的SPH模拟中,才需要使用粘性CFL时间步长提供器——SPH默认使用隐式时间积分。
1、设置时间步长
右击 Continua > Oil Continuum > Models > Adaptive Time-Step > Time-Step Providers 节点,选择 New > Convective CFL。

这里可以为模拟配置对流CFL时间步长提供器。默认情况下,模拟过程中启用时间步长提供器,并试图维持CFL数为0.72。对于这个模拟,默认设置是可以接受的。
再次右击 Time-Step Providers 节点,选择 New > Gravity CFL。

默认情况下,重力CFL时间步长提供器在整个模拟过程中都试图维持CFL数为0.073。
2、设置停止标准
选择 Stopping Criteria > Maximum Physical Time 节点,将 Maximum Physical Time 设置为0.5秒。
选择 Maximum Steps 节点,取消激活 Enabled。
3、点击 Run 进行计算。
12 分析结果
模拟结束时齿轮扭矩与物理时间的变化

油粒子的速度

油粒子动画

油在齿轮上的体积分数
注:本文为STAR CCM+ 2402软件随机案例。
”
(完)


