机器人线缆动态特性仿真

在机器人产品研发过程中,除了对本体部件的运动进行研究外,还需要对线缆的动态特性进行分析评估。在机器人在作业过程中,线缆会跟随机器人本体一起运动,两者之间还可能会产生接触碰撞。为了对线缆动态特性进行分析,首先需要对线缆进行准确地建模。下面介绍基于Simpack软件进行机器人线缆进行多体动力学分析的主要流程。
(1)在Simpack中建立机器人(机械臂)多刚体动力学仿真模型。部件之间使用铰接连接,约束自由度,并通过输入函数施加运动驱动,使模型中的运动情况和实际工况保持一致。

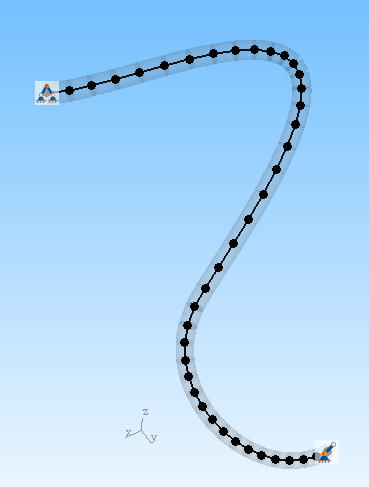
(2)线缆模型使用Nonlinear Simbeam建模元件建立,建立欧拉伯努利类型的非线性梁模型,能准确考虑线缆的非线性变形特性。
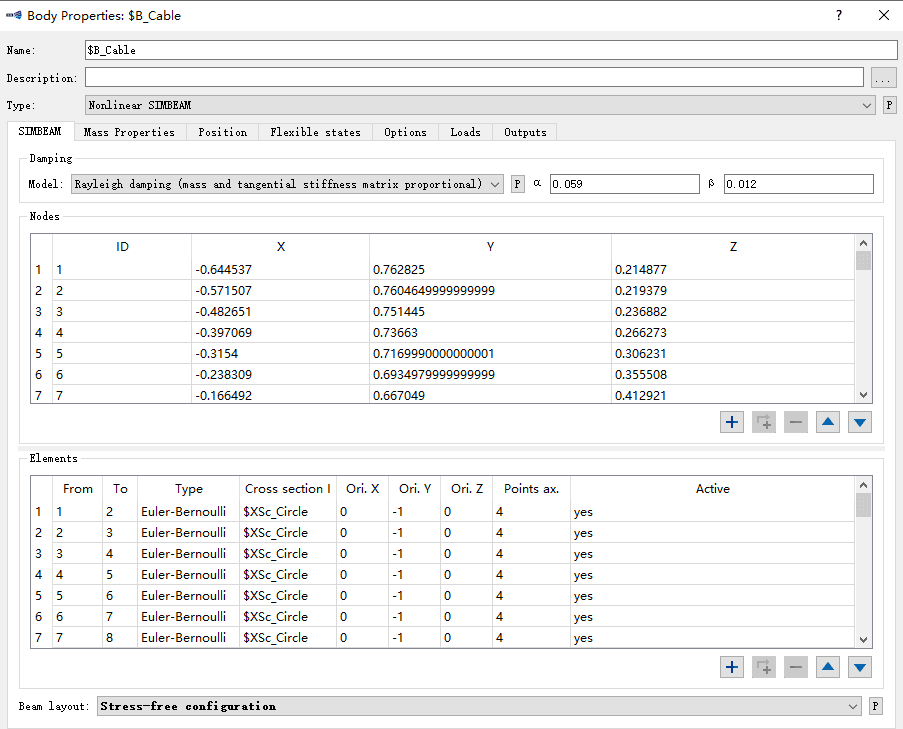
一共是40个梁单元。设置合理的线缆材料属性,包括密度、杨氏模量和泊松比等参数。所建立的线缆是实体模型,具有质量和几何外形。
(3)设置线缆和机器人本体的接触关系。通过PCM接触方法,设置这个线缆几何体和机器人本体几何体的多个接触关系。Simpack中定义接触关系,不需要定义接触刚度,只需要定义两个部件的材料特性,就可以自动计算出接触刚度。下图中,红色箭头为接触力。

(4)建模完成后,进行求解分析,得到线缆运动动态特性动画和相关的曲线数据。

登录后免费查看全文
著作权归作者所有,欢迎分享,未经许可,不得转载
首次发布时间:2024-02-28
最近编辑:8月前

硕士
|
技术顾问
Simpack 技术交流

相关推荐
最新文章
热门文章
