《有限元仿真实践原理》网格划分基础(3)

本文摘要(由AI生成):
理解单元力学性能是有限元分析的关键,涉及对单元类型及行为的深入理解。在定义载荷和边界条件时,基本了解单元性能即可。通过分析单个单元,可以验证求解器定义的准确性。单元自由度反映性能与兼容性,选择合适的单元类型对仿真结果至关重要。网格密度影响结果收敛性,需权衡建模时间、精度和成本。梁单元因其灵活性和精确性被广泛使用,但需注意其使用条件。时间约束是确定网格密度的重要因素,平衡人力资源和计算机耗时是关键。合理选择和应用单元类型,细致划分网格,可提高仿真结果的准确性和可靠性。
理解单元力学性能
成功地完成有限元分析,需要正确理解各类单元的力学性能。在定义载荷和边界条件时,至少需要对各类单元的性能有基本的了解,而对单元形函数方面深层次的理论知识并不是必要的。
进行一个单元的有限元分析是研究单元力学性能的基本方法。求解结果可与理论解进行详细对比。该方法对理解不同求解器的单元定义方式有很大帮助。
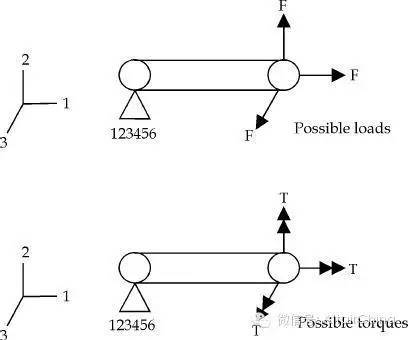
下图描述了单一单元模型,各个模型对应着不同的载荷和边界条件。增加边界条件可对单元的力学性能作更深入的研究。
对单元来说,自由度是一个很重要参数,因为它们不但描述了给定条件下的单元的性能,而且反映了单元之间的兼容性。关于单元兼容性相关的内容将在我们将在下面章节中进一步讨论。
杆单元(Rod)

杆单元示例
节点数2个节点
自由度数每个节点包含3或6个自由度
梁单元(Beam)
梁单元示例
节点数2个节点
自由度数每个节点6个自由度
壳单元(Shell)
一阶壳单元有3或4个节点
二阶壳单元有6或8个节点
每个节点上有6个自由度

壳单元示例:一阶三角形单元(CTRIA3)、一阶四边形单元(CQUAD4)、二阶三角形单元(CTRIA6)和二阶四边形单元(CQUAD8)。
实体单元(Solid)
一阶实体单元有4、5、6或8个节点
二阶实体单元有8、12、15或20个节点
每个节点上有3个自由度

实体单元示例:四面体、金字塔型、五面体和六面体单元
高阶单元
高阶单元指具有一个(或多个)中间节点的单元或基于几何的单元(如p型单元),这类单元易于建模且精度较高。p型单元可通过增加基底函数的阶次来提高有限元解的精度,但其构成形式较为复杂,难于理解。
高阶单元的使用会引起一些复杂的问题。例如,当压力加载到壳单元上时,分布在各节点上载荷的和值应保持相同(F=P*A),4节点和8节点壳单元节点载荷分布如图所示。

相同压力下不同节点壳单元的载荷分布(F = P x A)
绝大多数软件能够处理这类问题,但用户需要理解此类问题的原因以及高阶单元的其他性质以避免错误的应用。高阶单元通常使用三维实体单元模拟,因为这样可以大幅降低建模的时间以及网格规模。需要注意的是,求解时间并不会降低,因为模型的整体刚度矩阵取决于节点自由度数而非单元数量。
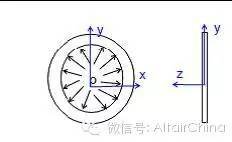
平面应力和平面应变单元
平面应力: Sz= tzx=tzy=0
薄板厚度恒定且载荷全部位于结构平面内,例如
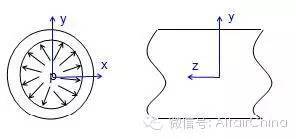
平面应变: ez=gzx=gzy=0
结构截面恒定且载荷沿结构长度方向分布,例如
单元的选择
单元的选择取决于分析类型、边界条件、几何特征以及对结果的需求等多方面因素。大多数问题可以使用不同方式处理,单元的选择也没有绝对正确的答案。然而,选择恰当的单元不但可以减少建模过程中花费的精力,缩减计算时间,而且还能提高仿真结果精度。通常,分析所选用的求解器可能对一些单元的使用有限制要求,但并不会限制所有的单元类型。
点质量 (Masses,0维单元)
Masses是点载荷质量,通常用来描述附加在结构重心处的配重。当结构较为复杂且不需描述其细节时,使用点质量是一个非常好的方法。
梁(Beams,1维单元)
Beams是一种细长的单元,典型应用有空间框架、方程式赛车的悬架、桥梁以及桅杆等,一维单元有以下几种:
• 杆(Rods)
• 棒(Spars)
• 梁(Beams)
• 焊接单元(Welds)
• 刚性单元(Rigids)
Beams因其灵活的截面定义、精确的应力和变形结果,在有限元分析中广泛使用。然而,Beams也存在一定的弊端,如建模时虽然不必描述几何外形,却要求用户指定详细的截面信息,给用户带来极大的负担。另外仿真结果的可视化也存在一定困难。Rods和Spars本质上是二维梁,非常适合于平面问题。Welds和 rigids用于定义节点之间的约束关系,该类单元将形成一个独立节点和若干个非独立节点的约束方程组,放置在整体刚度矩阵中。
平面单元(Plates,2维单元)
Plates是一种二维单元,通过假定一个无限厚度、固定厚度或轴对称几何来描述三维模型。该类单元具有缩减的刚度矩阵因而可以减少求解时间。同时,在满足单元假定的条件下,结果精度也将得以保证。
壳单元(Shells,2.5维单元)
Shells本质上是使用二维单元来表示三维模型,因此称之为2.5维单元。Shells非常适用于薄壁三维结构,例如车身、钣金件、注塑件或者任何厚度相对全局尺寸较小的零件。结构变形量由节点描述,结构应力可在上、下表面以及中面上计算,这为分析师研究薄膜效应和弯曲效应提供了可能。
实体单元(Solids,3维单元)
Solids单元常用于描述不能假设为壳单元的一般三维结构,如铸造件、锻造件及块状结构等。Solids单元没有使用限制条件,但通常比较难以建模。
网格密度和结果收敛性
网格密度和结果收敛性密切相关,但影响两者相互关系的因素存在争议。为了满足规定的时间和精度要求,用户需要在建模时间、模型准确度、计算时间以及人力成本之间做出权衡。
从数值精确性的角度来说,准确的网格是指网格细化以后,仿真结果没有出现显著的差别。尽管这个概念听起来比较简单,但很多因素是需要考虑的。网格细化必须精确的描述待分析的对象。
通过单元分割细化网格的方法可能会产生一些问题,除非新建的节点足够接近原始几何。网格细化时,要注意原始单元的使用假设。比如,当壳单元细化到不再有效时,就要用实体单元代替。
确定网格密度时,需要遵循以下原则。
几何细节要求
确定获得预期结果需要描述的最小几何特征。
一个尖锐特征可能会导致应力集中,但该特征可能不在零件的承重区域。要抓住这个细节则需要在整体结构分析后进行一次局部结构分析。
设计细节可用性
检查设计数据的可用性。如果设计数据不完整或使用有限元分析的方法帮助设计,最好使用简化模型,但要注意不能过度简化模型以致忽略了某些研究项目。
设计完成后,进行最终验证时,尽可能考虑详尽的细节并在时间允许条件下细化网格(包括结果精度检查时的网格细化迭代)。
与以前工作对比
如果要将当前仿真结果与相同或类似零件的分析结果进行对比,可以考虑使用类似网格密度的模型。如果考察不同模型的相关性,需注意检查不合理的边界条件、载荷工况、低质量的网格以及不恰当的网格密度等。如果发现测试缺陷,则需要重新建立测试标准。只有在完全理解别人工作的情况下,才可考虑使用他们的模型。
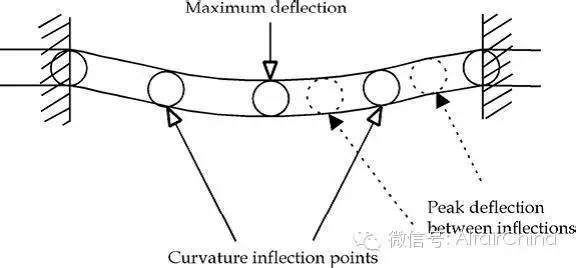
预期变形
确定可能出现的变形以及捕捉这些变形所需的网格密度。预估最大变形和弯曲位置,观察节点密度与变形模式之间的相互关系。注意以下变形模式:
收敛性检查
如果计划进行收敛性检查,至少需要进行一次网格细化。仿真结果中,如果相邻单元应力差别较大,则该区域可能没有很好的捕捉到应力变化。此时,建议进行一些网格细化工作。
一些程序可根据内置标准或用户自定义标准自动计算收敛性。另外,还有一些程序可以自动细化模型中非收敛区域的网格。这些功能均与载荷工况相关,不同的载荷工况将产生不同的网格模型。
P单元细化办法是通过增加每个单元或非收敛区域单元的复杂性实现的。所有自动化的功能均需要“近似完美”的模型,否则收敛性检查会将重点集中到与分析无关的小细节或满足一般收敛条件的单元、边界条件及载荷上。建模时,即使不打算进行收敛性检查,也尽量创建可以收敛的模型。例如,下图的平面结构使用壳单元模拟可获得较好的收敛性,而用“较为精确的”实体单元模拟则结果无法收敛。
因为壳单元在载荷方向不会产生应力,可获得与壳结构理论一致的收敛结果。相反,实体单元尝试计算“点载荷”,使得应力随着单元尺寸的减小而不断增大,以致结果不收敛。

变形或应力
多数情况下,如果只关心结构的变形和刚度结果,使用少量单元模拟结构即可。如果只关心结构变形情况,那么可以考虑使用更少量的单元。例如,分析矩形截面悬臂梁的变形时,一个梁单元或一个壳单元就可以了;而分析简支梁边界处的应力变化时,则需要大量的壳单元或实体单元来模拟。如果一个区域中出现了较大的应力变化,如框架一角存在网状结构,为获得合理的变形结果,需要使用大量的单元来模拟该区域。 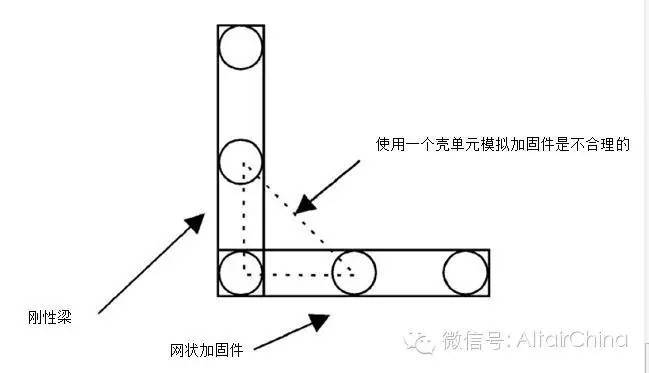
关注领域
确定关注领域。如果能够提前 预测出现问题的位置,则需要仔细对待这些位置。如果时间紧迫,可以细化该区域网格,其他地方使用粗糙网格近似模拟。如果没有相关经验并且没有一点线索,那么可以先使用均匀网格,然后再细化应力集中区域网格。根据工程经验,典型的应力集中区域出现在以下位置:
• 小孔
• 载荷作用点
• 边界定义点
• 连接点
• 狭窄特征
• 突变特征
单元类型
网格密度与使用的单元类型有很大关系,因此,针对不同的分析选择合适的单元类型是非常重要的。选择单元类型时,考虑该结构是否可以使用二维单元模拟,或者需要使用完全三维实体单元才能准确模拟结构的应力状态、几何以及局部变形情况。
例如,进行刚度和动力学分析时,发动机用壳和梁单元描述就可以了。但如果应力也作为一个考察项目,该部件就变成了三维实体,上述建模方式就无法获得合适的应力结果。发动机建模时,实体单元模型和壳、梁混合模型所需的时间差别很大。选择单元类型时应注意一下几点:
• 尽量不要混合使用三角形和四边形单元,如果必须使用三角形单元,应将其放置在非重点区域。
• 验证三角形单元是否适用某个分析时,应使用全三角形单元模型对比,不要对比四边形单元模型与细化的三角形单元模型。
• 尽可能使用一致尺寸的单元。
• 尚未完全理解分析对象前,不要使用壳和实体混合单元或梁和壳/实体混合单元。
• 尽量用实体单元模拟实体结构
• 用壳单元模拟薄板结构 (厚度 <10~20倍边长)
• 了解所有选用单元的应用假设
• 不要使用退化单元
• 不要将四面体单元与其他类型单元混合使用。如果必须使用,应将其放在结构外表面位置。
• 如果创建六面体单元需要太多时间和精力,可以考虑使用四面体单元(有时候这样可以节省几周的时间)。
• 如果创建壳单元或者实体单元需要太多时间和精力,可以考虑使用梁单元。
梁单元广泛用于模拟梁结构、紧固件及连接件等。然而,梁单元的复杂性可能成为各类单元中最易用错的单元。正确使用梁单元,需要注意以下几点:
• 剪切中心
• 翘曲约束
• 长深比
• 剪切变形
• 边界处的复杂应力状态
• 分析结果可视化
复杂截面梁的应力结果只有通过经典梁理论验证后才能使用。这里,圆形截面梁是个例外。因为它容易建模,而且分析结果与理论结果匹配良好(局部加载位置除外)。
经过几十年的发展,我们已经可以利用梁单元模拟各种复杂几何结构(通常为了节省计算时间),但是很少人能够理解其中的复杂性。因此,选用这类单元时,应做好迎接复杂状况挑战的准备。
时间约束
确定网格密度时,时间约束是一个重要的考察因素。一个折中的方案是平衡人力耗时和计算机耗时。通常,使用网格自动划分工具创建大模型可以节省大量的时间。另外,不断增加的计算机性能也在逐步降低使用特殊功能缩减单元规模的需求。
因而,人力资源逐步集中到提高生产力和市场竞争力方面。选择建模功能和单元类型的同时还需要考虑外在因素,以获得最佳的投入产出比。一旦确定了网格划分方案,在实施之前,建议与他人讨论该方案的可行性。
确定模型复杂性时,另外一个需要考虑的因素是模型的“保质期”。如果模型可以很长时间使用,为了减少后续工作量,应该寻求一种简化的模型修改和定义方式。这是一个常常被忽略的问题,正确认识这一问题,可以节省很多时间。
网格密度和结果收敛性总结
确定获得预期结果所需考虑的最小几何细节
评估设计细节可用性
检查当前项目的分析要求并与先前工作做比较
预期结构变形以及该结果对网格的要求
计划进行收敛性检查
如果关注应力结果,应选择一个较为详细的建模方案。考虑使用一个两阶段的解决方案,详细定义第二个模型,以降低解决方案的广度和复杂度。
确定关注领域
选择合适的单元类型。使用混合网格时需要特别注意。
考虑时间约束



