【Radioss干货】KJOINT2 连接介绍

本文摘要(由AI生成):
本文主要介绍了Altair HyperWorks的显式求解器Radioss中的KJOINT2卡片,用于建立连接关系。KJOINT2卡片由三部分组成:全局属性、平动属性和转动属性。全局属性包括连接的类型、约束自由度的刚度、临界阻尼、传感器和局部坐标系的定义。平动属性和转动属性包括平动刚度、转动刚度、位移锁、角度锁止和摩擦。KJOINT2连接的类型定义包括不同的自由度组合,如Spherical类型连接、Revolute类型连接、Universal类型连接、Translation类型连接、Oldham类型连接等。KJOINT2的建模要求和坐标系包括使用弹簧单元、定义SPRING弹簧的节点个数、局部坐标系的设定等。KJOINT2的位移和角度锁止包括平动锁止和转动锁止的定义。KJOINT2的刚度和阻尼包括连接类型的刚度和临界阻尼的定义。
通常,仿真工程师在建立有限元模型的过程中会涉及到不同的连接关系,并且它们有时候会种类繁多难以设定。
尤其是在显式分析中,仿真工程师经常会使用到1D弹簧单元进行连接关系的模拟,不同类型的连接关系的选择和设定会加重工程师的工作任务。
在Altair HyperWorks的显式求解器Radioss中,推荐工程师使用KJOINT2(/PROP/TYPE45)用于建立连接关系,它不仅可以设定连接关系的种类,简化连接关系的繁琐设置步骤,而且不会给整个模型增加多余的质量。
我们先来简单了解下KJOINT2(PROP/TYPE45)卡片,KJOINT2(PROP/TYPE45)卡片由三部分组成,分别是:全局属性,平动属性和转动属性。
1
全局属性
1
全局属性
包含 ⬇⬇⬇
▶ 连接的类型(不同自由度的定义),Type
▶ 约束自由度的刚度,Kn
▶ 临界阻尼,Cr
▶ Sensor
▶ 局部坐标系的定义 Skew_ID1和 Skew_ID2

2&3
平动属性和转动属性
2&3
平动属性和转动属性
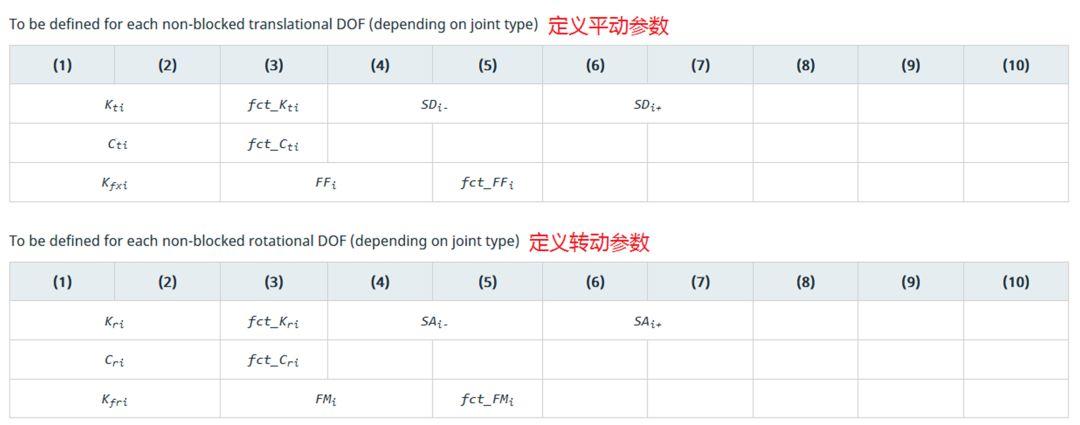
包含 ⬇⬇⬇
▶ 平动刚度: Kti,fct_Kti; 转动刚度: Cti,fct_Cti
▶ 位移锁:SDi-,SDi+; 角度锁止,SAi-,Sai+
▶ 摩擦:Kfxi,FFi,fct_FFi,Kfri,FMi,fct_FMi
那么, 接下来就从以下四点对显式求解器Radioss中的KJOINT2做具体剖析:
☑ KOINT2连接的类型的定义 – “Type”
☑ KJOINT2的建模要求和坐标系
☑ KJOINT2的位移和角度锁止
☑ KJOINT2的刚度和阻尼
KJOINT2连接的类型的定义 – “Type”
KJOINT2的连接类型 “Type”由不同的自由度DOF (degree of freedom) 组合来定义.
比如下面的连接类型是约束所有的平动自由度:

▶ Type=1: Spherical类型连接, 平动自由度全部约束,转动自由度全部自由。所以它用于承受任何方向的弯曲载荷以及扭转载荷。

*这个类型连接最少需要在/SPRING中定义两个节点N1和N2
▶ Type=5: Universal类型连接, 平动自由度全部约束,不可以轴向扭转,可以任何承受任何方向的弯曲载荷。

▶ Type=2: Revolute类型连接, 仅可以承受轴向扭转的荷载。

比如下面的连接类型是约束所有的转动自由度:

▶ Type=6: Translation类型连接, 可以用于轴向的拉伸压缩载荷。
▶ Type=7: Oldham类型连接, 可以用于承受y方向和z方向的剪切载荷。

还有一些特殊的约束组合,比如:
✴ 所有自由度都约束的rigid类型连接。它的Kn就用于定义约束刚度,当然如果不填写Radioss会使用默认的一个非常大的约束刚度。
✴ 所有自由度都不约束的Free类型连接;


▶ Type=3: Cylindrical连接类型
▶ Type=4: Planar连接类型
KJOINT2的建模要求和坐标系
KJOINT2的建模要求和坐标系
首先介绍一下普通的弹簧单元的局部坐标系如下定义

在弹簧单元的卡片/SPRING中定义了N1,N2和N3这些节点,SPRING单元自身的局部坐标系参考如下:
局部x方向:从节点 N1到节点N2;
那么节点N1,N2和N3形成了局部xy平面, 这个平面的法向就是局部z方向;
y方向不是节点N1到N3, 而是从N1出发的垂直于x方向的,公式描述为:

KJOINT2建模时需要使用到弹簧单元,然后对弹簧添加相应的属性(SPRING+/PROP/TYPE45),并且它的两端节点N1和N2分别连接Rigid Body,N1指向N2的方向被定义为弹簧自身的X轴。节点N1,N2用于定义KJOINT2弹簧单元本身,所以它们不可以是重合的点,但是为了较好的模拟连接,推荐N1和N2点可以选用重合点。
定义KJOINT2至少需要两个节点N1,N2,除此以外也可以有其他的节点比如N3,N4用于定义局部坐标系。这需要在前处理器HyperMesh中考虑SPRING单元具体使用到几个节点,如:SPRING2,SPRING3,
SPRING4。

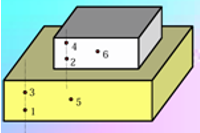
随着KJOINT2是根据连接类型不同,局部坐标系也可以根据需要设置不同参考。比如SPRING的节点N1和N2取重合点,那么节点N1到N3就是局部坐标系中的x方向。那么N1,N3和N4节点就组成的平面,它的法线为局部z方向。如下图 ⬇
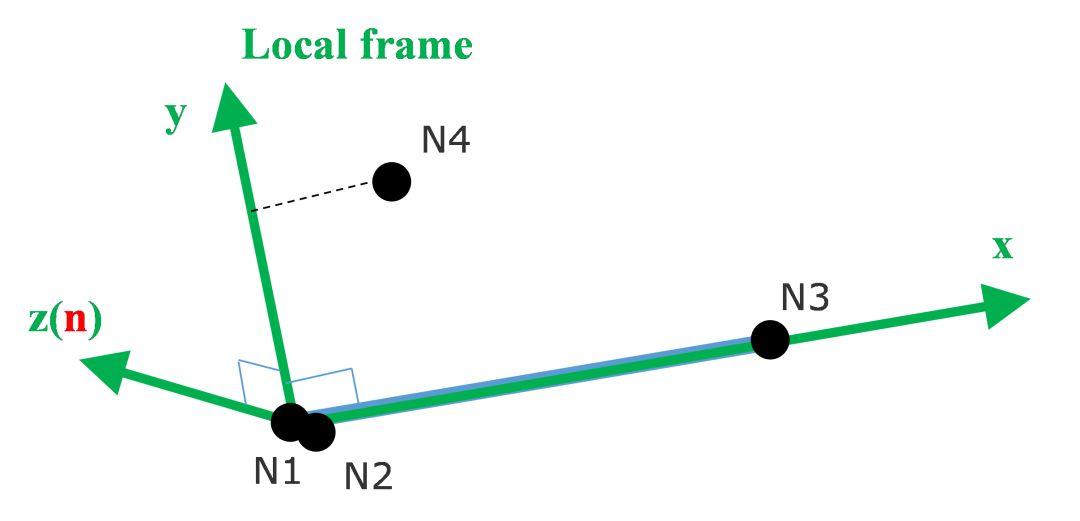
建模过程中定义SPRING弹簧的节点个数时需要根据连接关系类型(TYPE)注意以下问题:
▶ 需要N1,N2两个节点的连接关系:
Type=1: Spherical;Type=8: Rigid;
以上这些类型连接可以最少仅需要N1和N2点,那么当没有定义节点N3,N4时,局部坐标系可以同全局坐标系。
▶ 需要N1,N2,N3三个节点的连接关系:
Type=2: Revolute;Type=3: Cylindrical;Type=6: Translational;Type=4: Planar;
以上这些类型连接可以最少仅需要N1,N2和N3点三个节点,那么节点N1到N3就是局部坐标系中的x方向。如果节点还是N3没有定义,那么此时节点N1和N2一定不能是重合点,因为需要根据N1和N2节点定义局部x方向。
▶ 需要N1,N2,N3,N4四个节点:
Type=7: Oldham;Type=5: Universal;Type=9: Free;
以上这些类型连接可以最少仅需要N1,N2,N3和N4点四个节点。
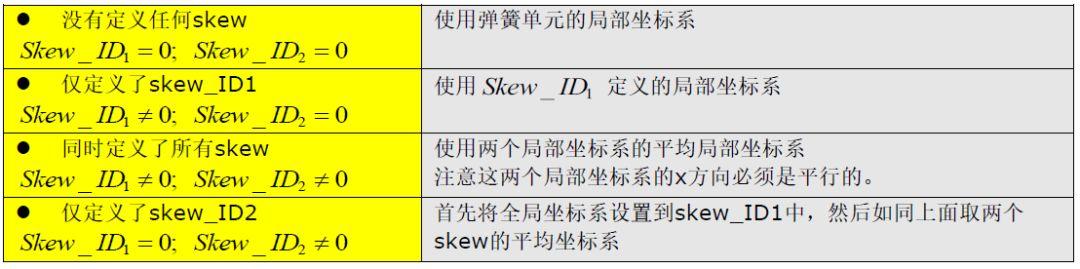
在定义弹簧单元时,为了满足特殊的坐标系设定,那么KJOINT2弹簧单元坐标系也可以根据skew_ID1和skew_ID2定义的不同而设定⬇

KJOINT2的位移和角度锁止
KJOINT2的位移和角度锁止
KJOINT2卡片中下面两部分分别是定义平动和转动属性的区域,首先我们来解释一下位移和角度锁止的定义。

KJOINT2中SDi+和SDi-是定义平动位移锁止,而SAi+和SAi-是定义转动角度锁止,用于角度锁止的角度是用弧度单位。
其中i是指自由度,i=x,y,z方向。
比如Type=6: Translation类型连接中有x方向(轴向)平动自由度,那么相应的平动位移锁止就是SDx+,SDx-。
比如 Type=4: Planar连接类型中有y方向和z方向两个平动自由度,和一个x方向(轴向)转动自由度,那么相应的平动锁止位移就是y方向的SDy+,SDy-和z方向的SDz+,SDz-。以及角度转动锁止SAx+,SAx-。
这里的正+和负-的下标表示最大正向和最大负向的锁止。
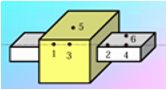
平动锁止在3个自由度的锁止如下图表示。

x轴向拉伸导致的拉伸位移最大不超过SDx+压缩导致的压缩位移最大不超过SDx-。
y方向剪切导致的正向剪切位移最大不超过SDy+,负向剪切位移最大不超过SDy-。
而z方向剪切导致的正向剪切位移最大不超过SDz+,负向剪切位移最大不超过SDz-。

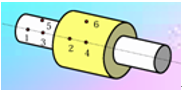
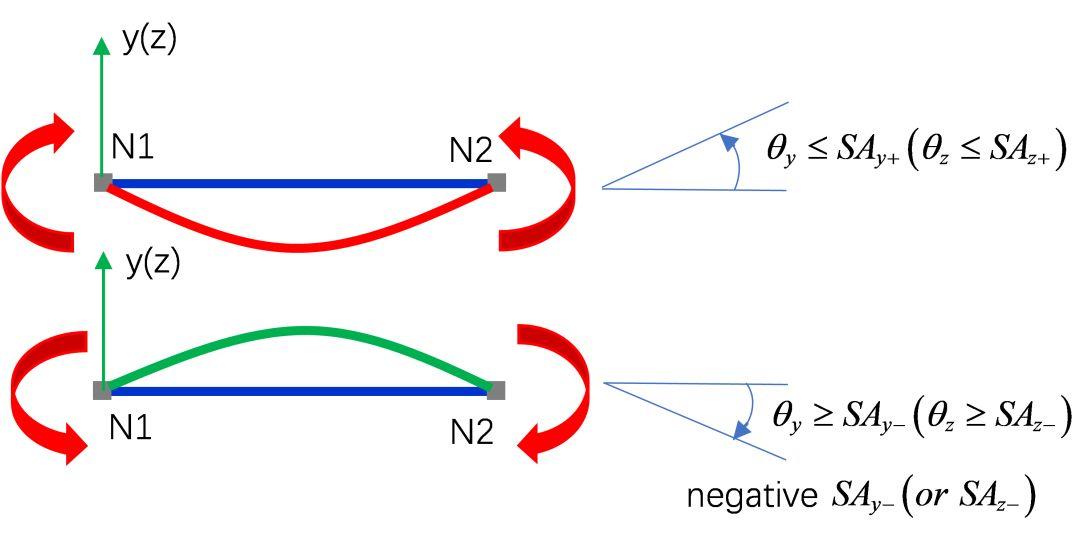
转动锁止在3个自由度上的锁止如下图表示。

x轴向扭矩导致的扭转角度正向最大不超过SAx+负向最大不超过SAx-。
y方向弯矩导致的正向弯曲角度正向最大不超过SAy+,负向最大不超过SAy-。
而z方向弯矩导致的正向弯曲角度最大不超过SAz+,负向最大不超过SAz-。
这次的KJOINT2就介绍到这里,下次要重点介绍一下KJOINT2的刚度和阻尼。
敬请期待哟~~~


