【MBS技术专题】模型分享:四旋翼无人机仿真分析案例

本文摘要(由AI生成):
这篇文档的主要内容是四旋翼无人机的建模与仿真,包括案例介绍、仿真建模流程和仿真结果。案例中使用了 2 套相同的固定螺距螺旋桨来控制无人机的升力和扭矩。建模时,导入了几何体并添加连接关系、驱动、空气动力、输出和控制系统模型 FMU 文件,并编辑输入输出信息,最后运行仿真。仿真结果包括分析结果动画、无人机运动姿态变化曲线和无人机质心坐标变化曲线。
案例介绍
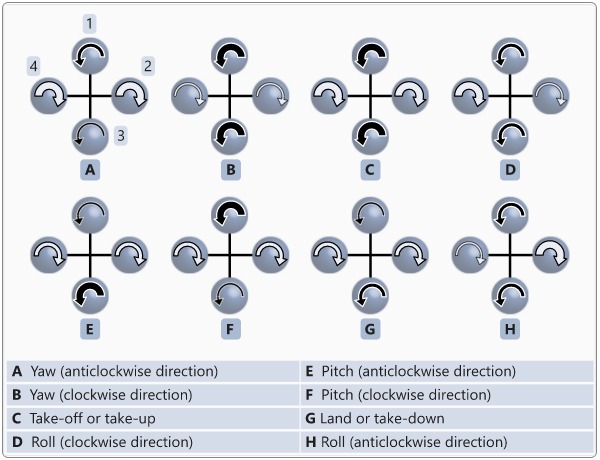
四旋翼无人机模型使用2套相同的固定螺距螺旋桨(2个顺时针和2个逆时针)来控制升力和扭矩,通过改变一个或多个旋翼盘的旋转速度来实现对无人机运动的控制,从而改变其推力或升力特性。
在MotionSolve仿真中实现这种控制,可以通过导入Activate创建的控制器的FMU模块来轻松实现。

横向螺旋桨(左和右)控制飞行器的侧倾,纵向螺旋桨(前和后)控制飞行器的俯仰。
下图中的旋翼信号差异决定了飞行器的运动姿态。
仿真建模流程
导入几何体并添加物体之间的连接关系。
添加4个驱动定义转子旋转的运动
添加空气动力,包括风扰动力和推力,推力取决于转子的旋转。
Fz=Tf*Wz²
其中:Fz = 推力,Tf = 推力系数(考虑到螺旋桨的几何形状、空气密度和旋转面积而定义,在此分析中Tf=2.1998e-5),Wz = 螺旋桨的角速度 。
添加角度、位移和速度的输出
导入控制系统模型FMU文件
编辑FMU中的输入输出信息。FMU的输入是无人机的角度、位移和速度,输出是每个转子的螺旋桨旋转速度。
将FMU中的输出信号作为输入添加到螺旋桨的运动中。
运行仿真。
仿真结果
分析结果动画


无人机运动姿态变化曲线

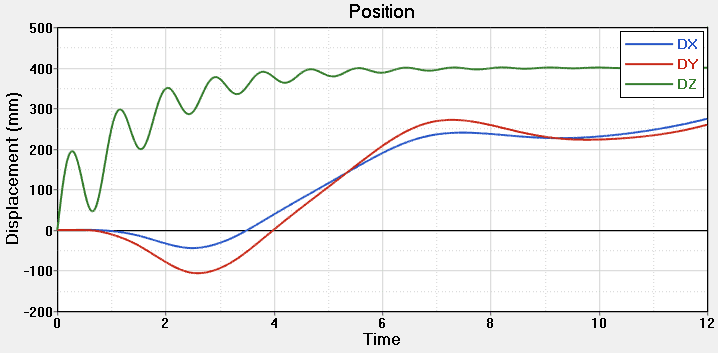
无人机质心坐标变化曲线
登录后免费查看全文
著作权归作者所有,欢迎分享,未经许可,不得转载
首次发布时间:2024-03-24
最近编辑:7月前

澳汰尔工程软件(上海)有限公司

相关推荐
最新文章
热门文章
