【MBS技术专题】农业设备—旋转式搂草机动力学仿真

本文摘要(由AI生成):
这篇文章主要介绍了旋转式搂草机的工作原理和使用子程序控制搂草机耙齿的方法。搂草机由拖拉机牵引,耙齿将割下的干草扫向耙的中心,然后耙齿有序缩回,将干草有序排列,等待后续集中收集。文章还介绍了如何利用 MotionView 建立搂草机模型和模拟工作过程。通过仿真分析,得到了搂草机的运动动画结果、位移和力的数据。文章最后对旋转式搂草机的工作过程进行总结。
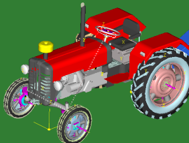
旋转式搂草机属于一种大型农业设备,主要用于收割完的干草收集。
一般来说,搂草机由拖拉机牵引
由于搂草机径向臂带有旋转的耙齿,耙齿将割下的干草扫向耙的中心
耙齿有序缩回,将干草有序排列,等待后续集中收集
学习目标
学习目标
如何通过 MotionView 建立搂草机模型和模拟工作过程
如何通过使用子程序来控制耙齿的缩回进程
多体动力学模型
多体动力学模型
建模过程
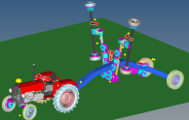

步骤1:在MotionView中导入CAD数据,添加铰链和运动副
步骤2:创建径向臂和耙齿,参数化图形,点和标记
步骤3:利用耦合器和运动副确定拖拉机的转向系统
步骤4:添加10个AutoTires,从00_Data/.tir导入轮胎文件
步骤5:使用子程序定义在径向臂耙的运动,从00_Data\motsub.py文件导入
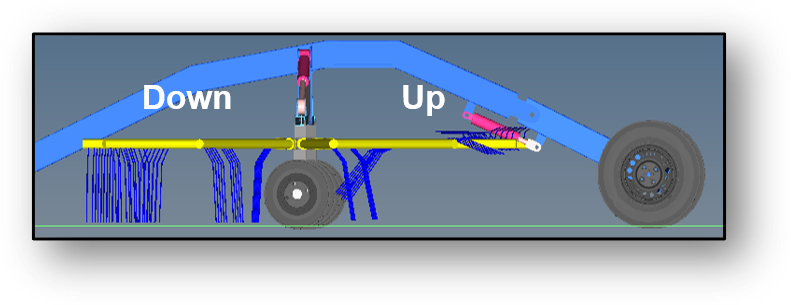
* 这个子程序控制基于径向臂方向标记的耙齿
仿真分析
仿真分析
旋转式搂草机运动条件建立过程
拖拉机将搂草机牵引至作业中心并停止运动;

将控制搂草机的耙齿展开;
拖拉机牵引搂草机继续向前运动并使耙齿旋转;
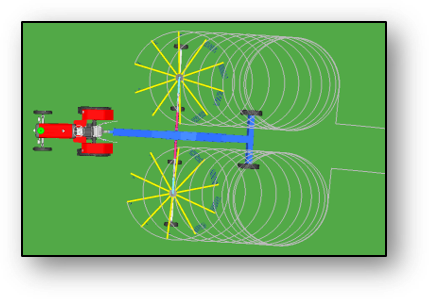
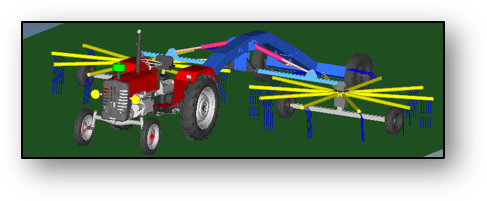
动画结果

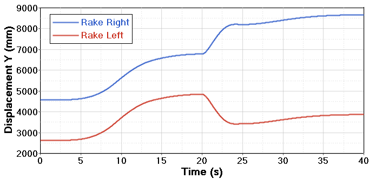
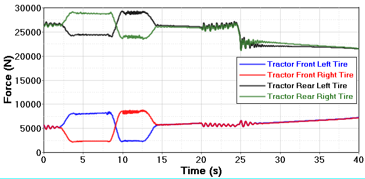
位移和力


总结
总结
本文对旋转式搂草机的工作过程进行多体动力学仿真分析,通过子程序定义的方式对搂草机的耙齿进行控制,并得到相应的动画结果。
登录后免费查看全文
著作权归作者所有,欢迎分享,未经许可,不得转载
首次发布时间:2024-03-24
最近编辑:8月前

澳汰尔工程软件(上海)有限公司

相关推荐
最新文章
热门文章
