【MBS技术专题】模型分享:机械臂多体动力学仿真分析

本文摘要(由AI生成):
本文对机械臂的工作过程进行了多体动力学仿真分析,包括建模、求解和结果读取等方面。通过使用非线性柔性体(NLFE)创建线缆和液压模型,预测线缆和液压系统的载荷和应力,以及预测机械臂的液压钳的应力水平。同时,与 Activate 建立联合仿真,实现精确控制。通过对结果的读取和分析,为电动机功率的选择和机械本体结构提供设计依据。
综 述
综 述
机械臂被广泛应用于工业制造。工作时机械臂要重复移动位置并精确控制,通过控制参数定义自由度,从而保证机械臂移动的精确性。液压及线缆系统应该具有一定的灵活性,保证机械臂工作过程中不会折断。机械臂通过 MotionView 建模,用 MotionSolve 求解、分析。
学习目标
学习目标
如何使用非线性柔性体(NLFE)创建线缆和液压模型。
通过建立3D接触,可以预测线缆和液压系统的载荷和应力。
通过柔性体建模可以预测机械臂的液压钳的应力水平。
与 Activate 建立联合仿真,实现精确控制。
多体动力学模型
多体动力学模型

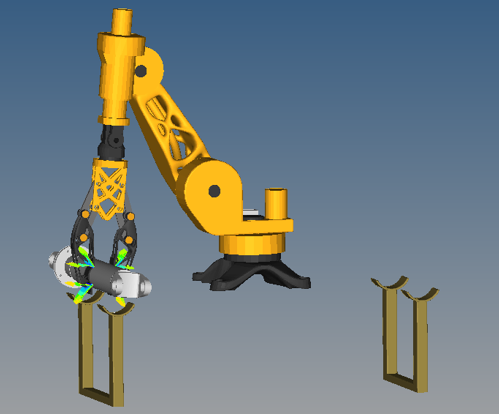
步骤1:导入CAD数据,添加铰链和衬套连接;
步骤2:增加液压钳、轴、支撑架之间的接触;
步骤3:增加机械臂移动位置的驱动设置;
步骤4:运行这个简单模型;
参考模型:Robot_Arm_01.mdl
在以上模型的基础上增加非线性体的线缆

步骤5:取消当前显示的驱动设置以及接触设置;
步骤6:创建没有载荷的非线性线缆模型;
步骤7:通过坐标到线缆位置定义驱动;
步骤8:通过命令 command 文件定义线缆的预载;
步骤9:运行模型及其Python脚本;
…\Altair\\utility\mbd\nlfe\NLFE_generate_
loaded_csv.py to extract the loaded state of the NLFE cables and save it into a CSV file
参考模型:
Robot_Arm_02_Cable0_positioning.mdl
Robot_Arm_02_Cable1_positioning.mdl



步骤10:激活和轴的接触,失效线缆的驱动;
步骤11:导入带有线缆预载点的CSV文件;
步骤12:用柔性体代替液压夹;
步骤13:在线缆连接点上增加球面单元,并且在球面和上上臂之间建立带有摩擦的接触;
步骤14:用力的方式创建驱动,创建与Activate 联合仿真的输入和输出;
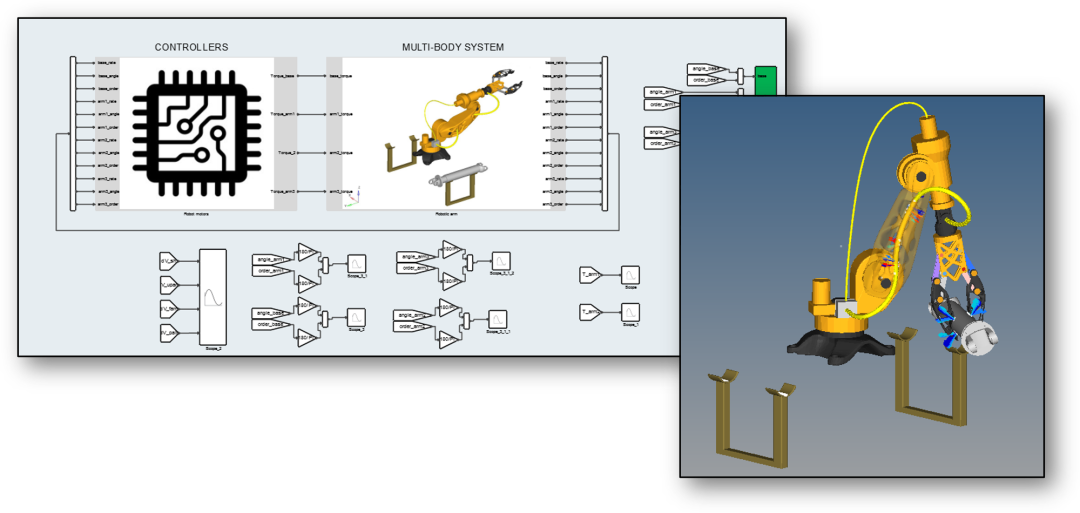
Activate 设置
步骤15:导入机械臂;
步骤16:增加控制器;
步骤17:运行模型。
参考模型:
Robot_Arm_03_Complete.mdl
_03_Control\Robot_Arm_Controls.scm

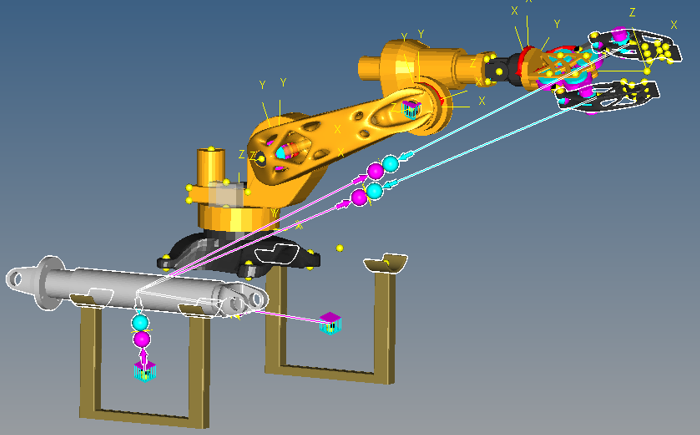
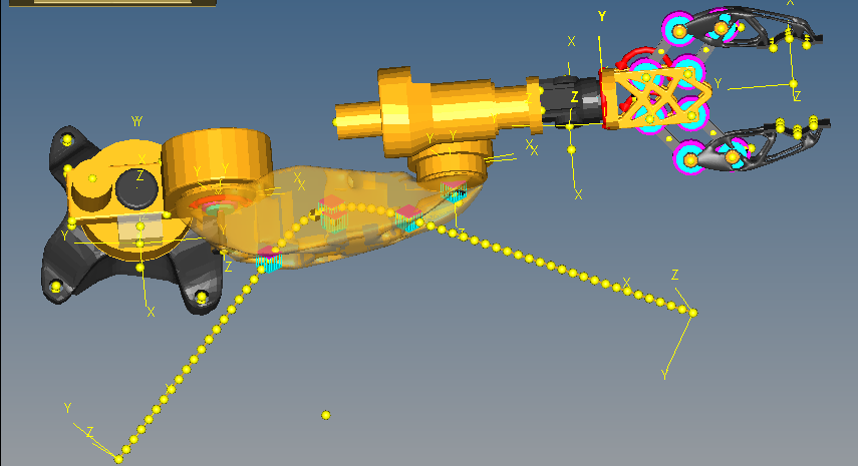
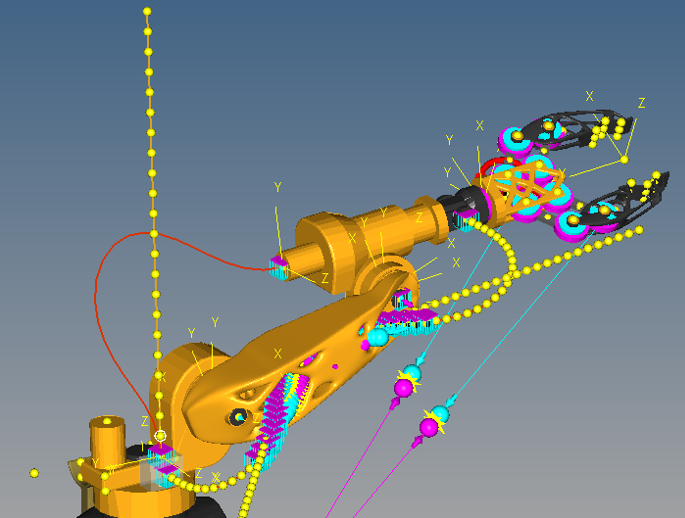
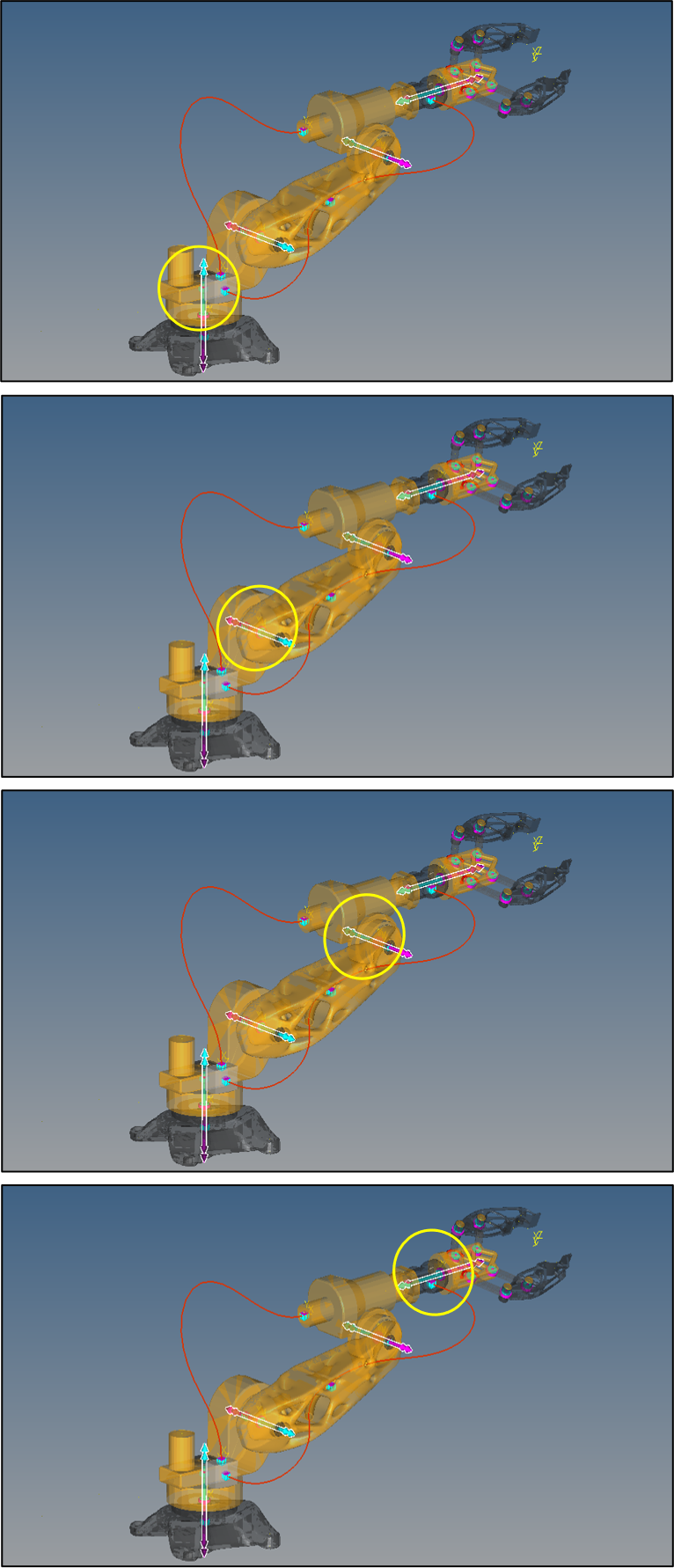
机械臂运动学仿真,模拟机械臂将轴从右支撑架挪到右支撑架;
模拟缆绳的定位,提取其预载状态;
与 Activate 联合仿真,模拟机械臂的扭矩,将轴移动。
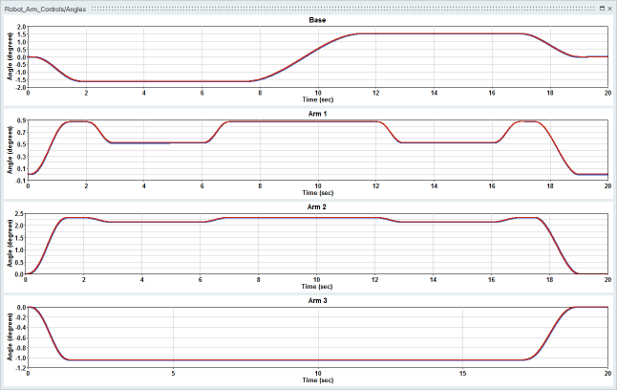
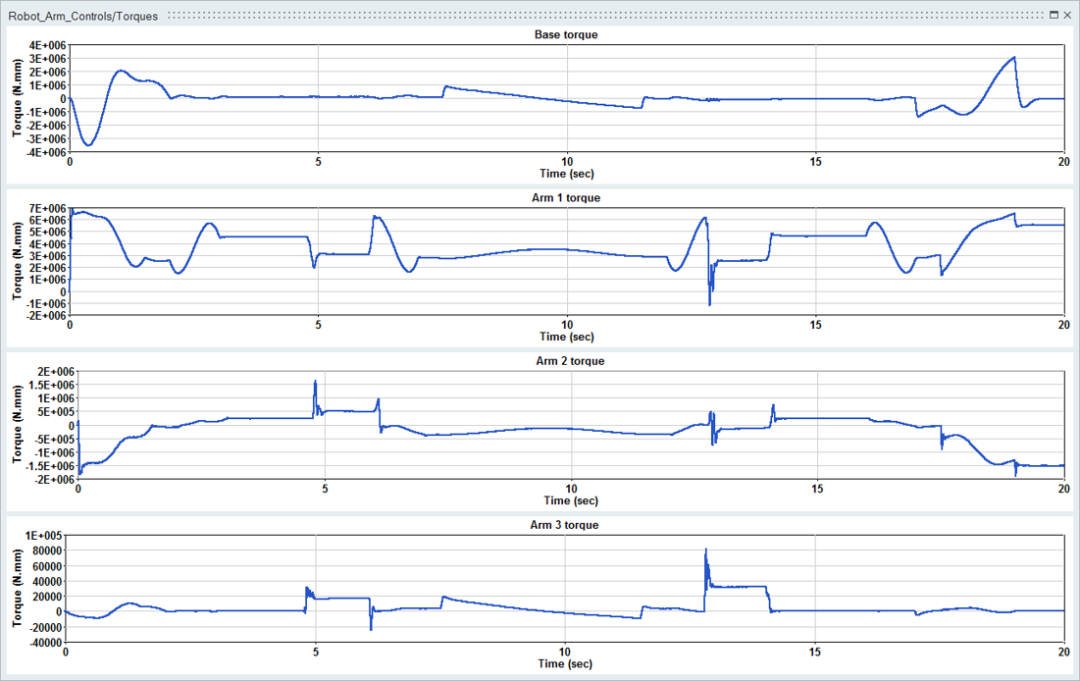
结果读取
结果读取

点击图片可查看大图

点击图片可查看大图
总 结
总 结
本文对机械臂的工作过程进行多体动力学仿真分析,关键部位柔性体建模,并输出其工作过程的接触力、应力、转矩、转角等结果;通过这些结果的输出,为电动机功率的选择、机械本体结构提供设计依据。


