【MBS技术专题】这也能仿真?蜘蛛爬行原理揭秘

本文摘要(由AI生成):
这是一篇关于机械蜘蛛运动过程的多体动力学仿真分析的文章。文中使用 Altair MotionSolve™ 软件对蜘蛛的爬行过程进行建模和仿真,分析了机器蜘蛛的运动过程和工作过程中的接触力、应力等结果,并输出了相应的结果图表。通过这些结果,为机械蜘蛛的本体结构设计提供了依据。
声明
文中涉及到机器蜘蛛的仿真分析,
对于蜘蛛感到不适的朋友,
请谨慎下滑观看噢!
综述
综述
本文通过多体动力学分析对蜘蛛的爬行过程进行了仿真,包含关键部位柔性体建模、驱动原理分析、爬行过程中的接触力及应力分析等。机器蜘蛛在 Altair MotionSolve™ 中仿真 主要包括以下几点:

学习目标:
增加NLFE电缆来代表液压管线;
使用3D接触来评估爪子和地面之间的负载。
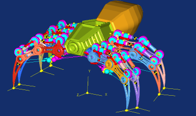
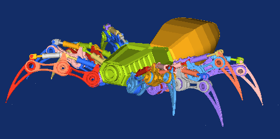
模型渲染预览:

多体动力学模型建模过程
多体动力学模型建模过程
01
导入CAD数据;
02
在蜘蛛腿上添加铰链连接;

03
添加代表液压执行机构的动作;
在Activate中,运动可以被现实的执行器代替(可选);
04
运行这个简单模型;
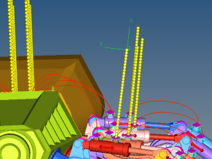
在以上模型的基础上增加非线性体的线缆:
05
创建没有载荷的非线性线缆配置;
06
通过坐标到线缆位置定义放置在液压管电缆;

07
使用 MotionSolve 命令保存预加载配置下的线缆;
<save< span="">
model_file = "Cable_preloaded_state.xml"
/>
08
运行模型;
09
运行 Python 脚本 NLFE_generate_loaded_csv.py ,提取 NLFE Body 的加载状态并保存到 CSV 文件中;
10
使用 NLFE Connectivity 选项卡的 Loaded View 中的 Import Points 选项将 CSV 文件导入到 MotionView 中;

(点击图片可查看高清大图)
11
取消将电缆放置在液压管上的动作;
12
运行模型;
仿真分析
仿真分析
仿真过程:
机器蜘蛛运动仿真;
参考模型:Robot_Spider_01.mdl
液压管路仿真,提取相应的力;
参考模型:Robot_Spider_02_cables_positioning.mdl
完整状态仿真;
参考模型:Robot_Spider_03_complete.mdl
(模型下载链接见文末)

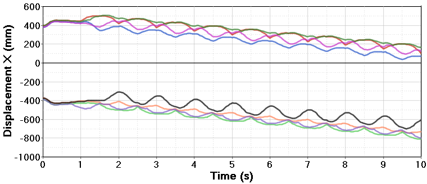
结果读取:

★
总结
总结
本文对机械蜘蛛的运动过程进行多体动力学仿真分析,关键部位柔性体建模,并输出其工作过程的接触力、应力等结果;通过这些结果的输出,为本体结构设计提供依据。


