技术干货丨HyperWorks Connectors 连接元功能介绍(上)

上期
连接元功能介绍
在划分部件的有限元网格后,需要创建连接单元或接触关系以连接零件实现载荷传递。Altair HyperWorks中将连接单元统一归类为Connectors(连接元)。创建统一入口在Connectors这个工具条下。

HyperWorks 中的 Connectors 工具条
常见的连接关系及其有限元表示形式
工程上常见的连接形式有焊点、螺栓、焊缝、胶粘等,若按其真实几何形状真实建模,则建模成本巨大,且操作不便。在有限元分析中,通常将这些连接关系简化,简化的形式虽繁杂多变,但其最终目的都是为了在满足分析目的的前提下保证载荷传递的准确性,同时尽可能简化连接。
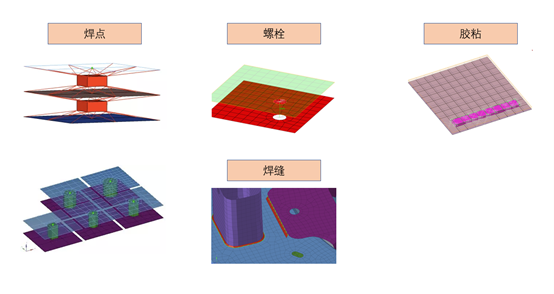
几种常见连接的有限元连接形式
对于钣金件、薄壁件,工程中通常使用焊点进行部件之间的连接。焊点为几块钣金在焊枪处通电产生高温,使原钣金母材熔融生成。有限元分析中,通常将焊点按照不同分析目的(对局部应力的重视度)分类简化处理。

白车身局部焊点
刚性单元(rigid)
刚性单元用RBE2单元模拟部件之间的连接,点对点传递载荷。这种方法简单高效,通常用于研究模型整体状态,对局部载荷、应力的考核较差。
rigid
刚性单元+周围连接(rigidlnk)
RBE2单元力的传递点较单一,可以添加周围的点来分散传递载荷,该种形式称为rigidlnk,生成的刚性单元主节点在焊点中心,其余节点为从节点。

rigidlnk
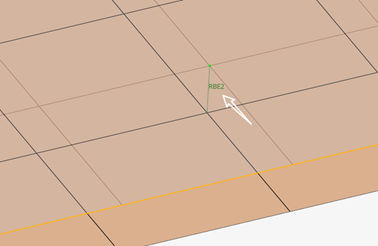
cweld 焊点(cweld)
当我们需要连接的位置不在节点位置时,可以使用cweld焊点。它允许单元和单元直接直接在指定位置(而不必寻找附近的节点)创建cweld单元,实现载荷传递,通常用于航空建模。
焊点的连接形式

允许不直接连接节点
cweld 焊点
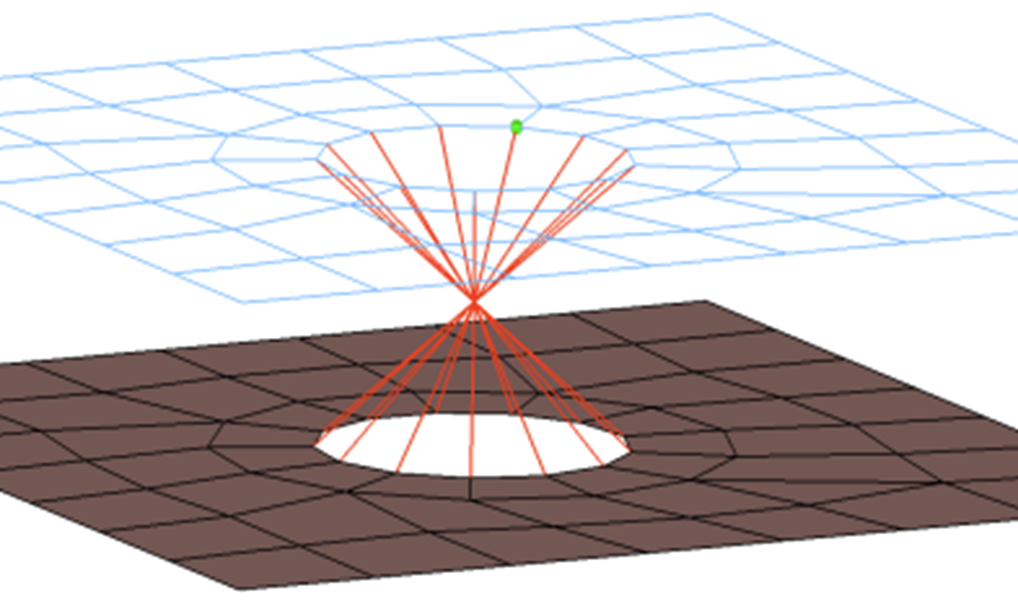
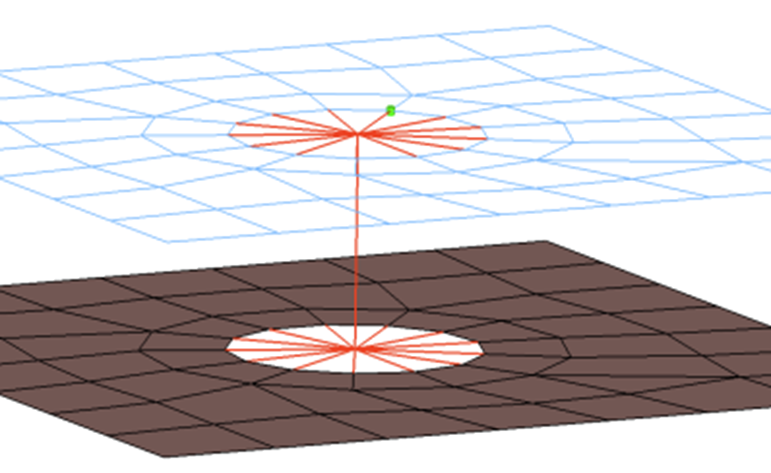
acm焊点(acm(general))
acm全拼为Area Contact Method,意思是载荷通过接触面传递的焊点,因其网格适应性好且载荷传递较准确,常用于白车身钣金件之间的连接。
acm焊点的实质是在焊核处创建了一个六面体,在六面体的角点处伸出RBE3单元连接上下两个部件,实现载荷传递。
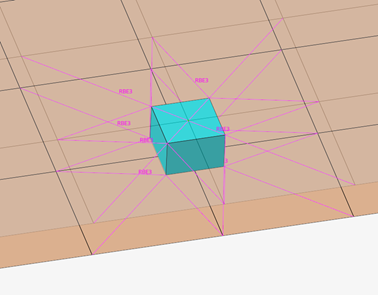
acm(general)焊点
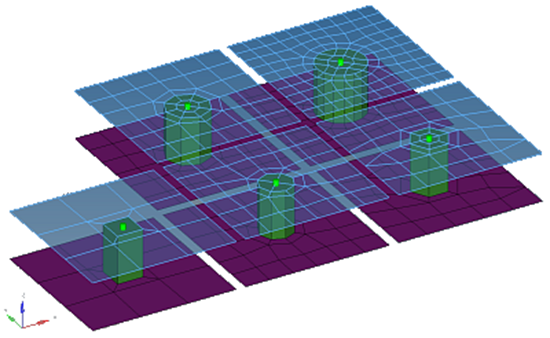
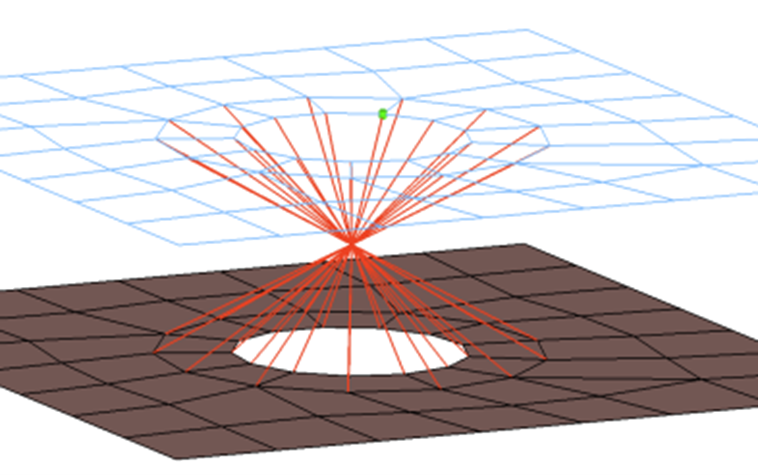
acm(多六面体)
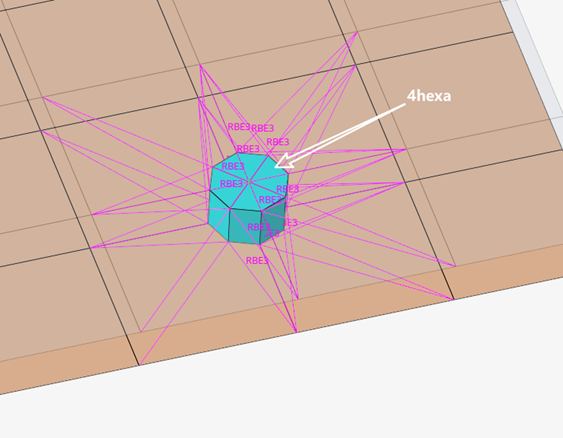
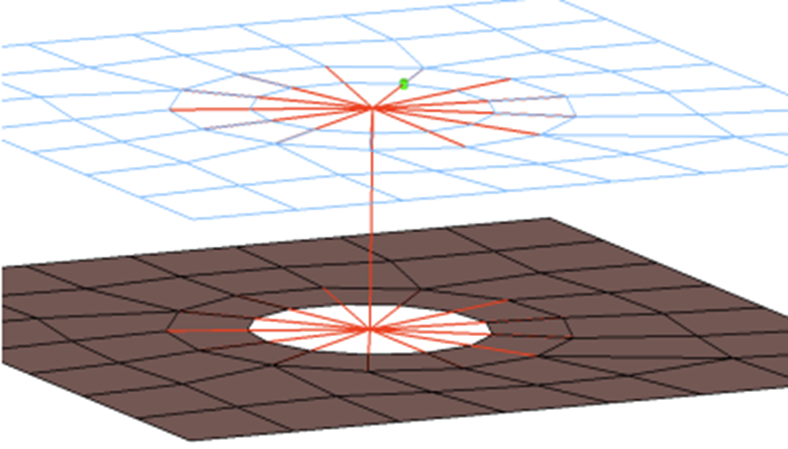
焊点(acm(general)+4hexa)
在acm焊点的选项中,还可以选择六面体的生成类型,当控制生成多个六面体时,就能更好地接近焊点的圆柱形状。HyperWorks 中可选择生成1、4、8、16、32个六面体。
焊点的连接形式
允许不直接连接节点
acm(general)焊点
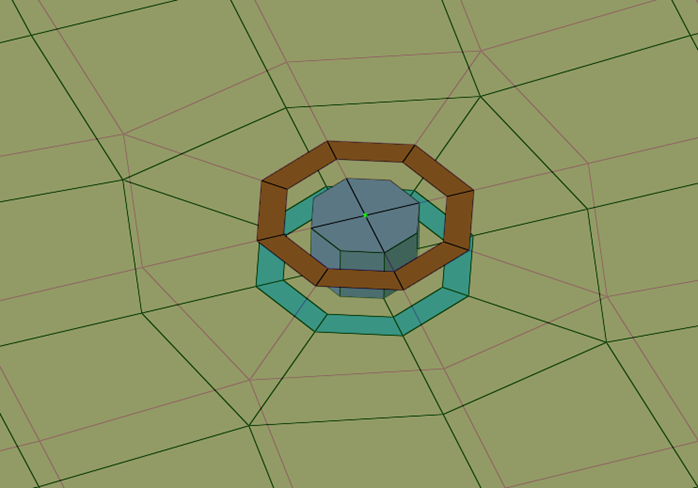
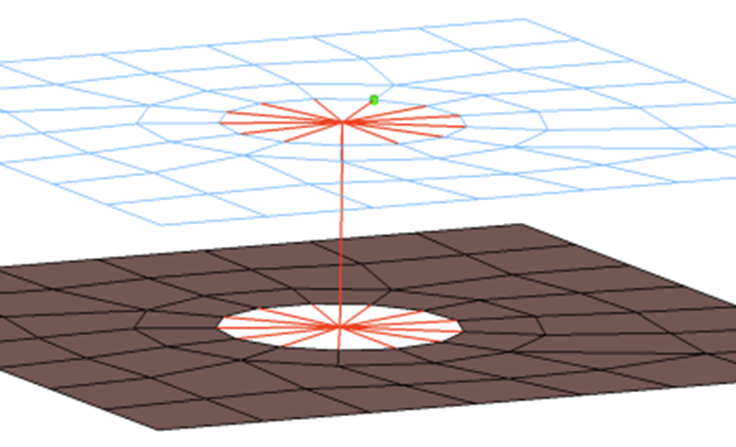
hexa nugget
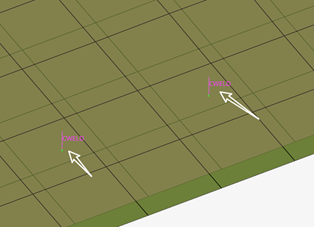
不同于acm焊点通过RBE3单元分散载荷至周围节点上,hexa nugget焊点通过对热影响区重画网格,更加准确地反映热影响区的应力情况。
hexa nugget焊点的焊核形式为六面体,六面体上下表面的节点和上下部件的网格面之间将自动创建接触(类型为绑定tie),用于传递载荷。
焊点的连接形式
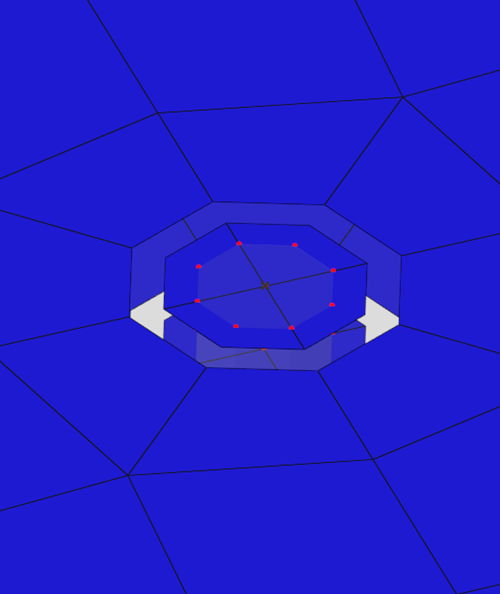
自动生成点-面的tie接触
cweld 焊点
FEMFAT 焊点(FEMFAT)
FEMFAT焊点常用于钣金疲劳耐久性分析。HyperWorks 2021.1之后的版本中支持生成该焊点形式。
该焊点对连接部件的热影响区(HAZ)进行网格重画,以更好地获得网格的局部应力,此外其焊核使用一个Cbar单元,赋予截面和属性后用于模拟焊核的直径。因该方法需要网格重画,容易因周围网格的局限导致生成失败。
焊点的连接形式
自动重画网格
FEMFAT 焊点
自定义焊点类型(以rbe3-cbar-rbe3为例)
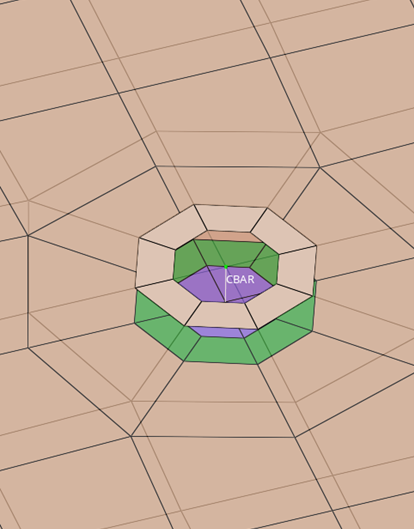
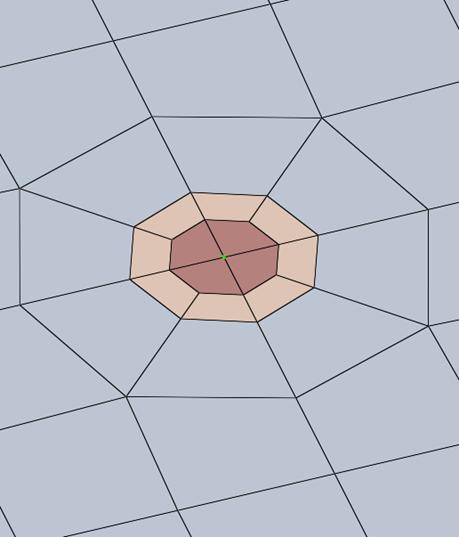
除了HyperWorks内置的焊点类型之外,我们还可以添加自定义的焊点类型。比如rbe3-cbar-rbe3的连接关系默认在HyperWorks是没有的,我们可以手动创建。

rbe3-cbar-rbe3焊点形式
我们编辑C:\Program Files\Altair\2021.2\
hwdesktop\hm\bin\win64\feconfig.cfg文件,在其中添加一段(可以防止在rbe3-celas-rbe3的配置段之后,见下图)。
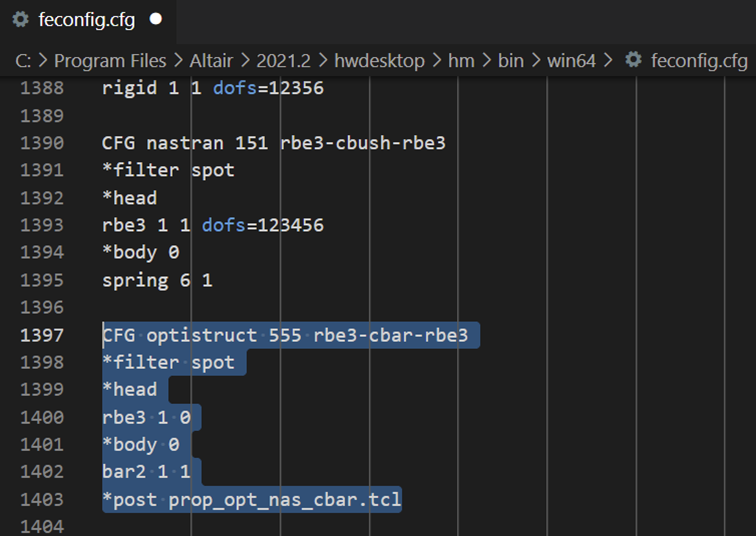
自定义焊点类型(rbe3-cbar-rbe3)
保存文件后,重启HyperWorks,打开Connectors-Controls,新建焊点control,在焊点类型中可以看到新增了该类型。
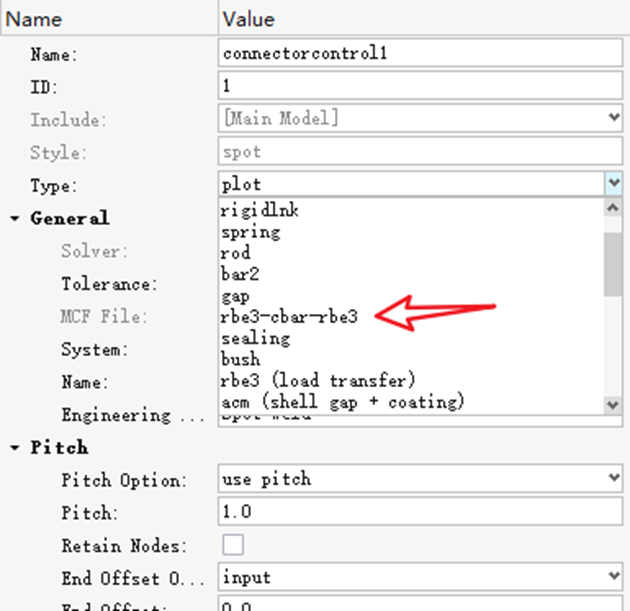
rbe3-cbar-rbe3
当部件之间没有贴合的法兰面连接导致无法焊点连接,或者对强度要求较高时,通常会采用焊缝连接,参考下图。在有限元分析中,也会将焊缝进行简化处理。

焊缝连接
刚性单元焊缝
将两部件的边界直接通过刚性单元连接。

刚性单元焊缝
四边形单元焊缝
顾名思义,通过生成四边形单元,模拟焊缝的载荷传递。

四边形单元焊缝
五面体单元焊缝
使用五面体单元模拟焊缝,载荷传递更加真实可靠。五面体单元的节点伸出RBE3单元,连接周围部件。
五面体单元焊缝连接
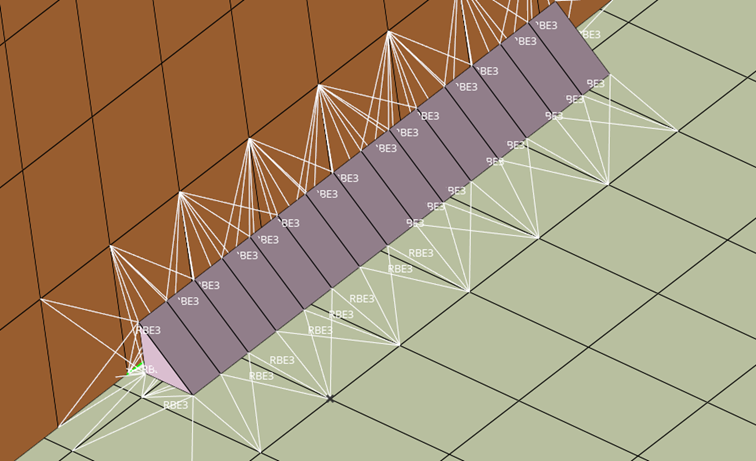
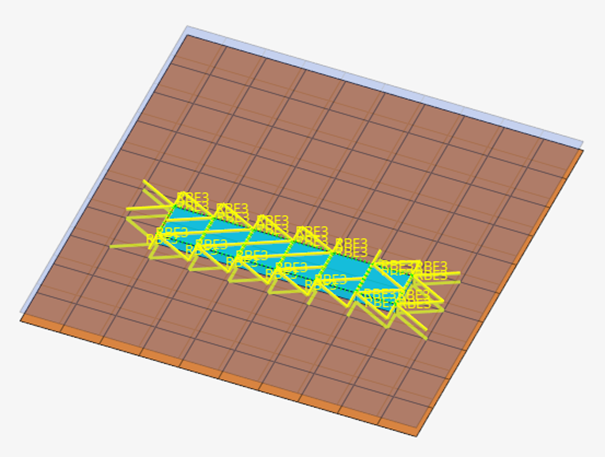
rbe3-cbar-rbe3类型的焊缝
除了上述类型外,还可以使用 rbe3-cbar-rbe3 类型创建焊缝,该类型相对五面体单元焊缝来说,网格适应性更好;相对四边形及 rbe2 类型来说,载荷传递更加真实。该焊缝的创建过程可以将在下期进行介绍。
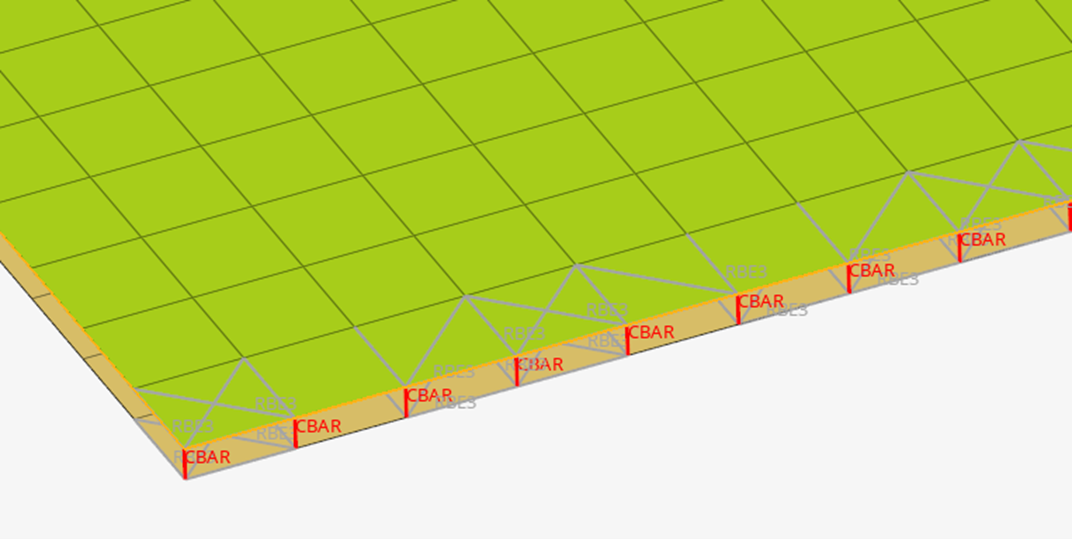
rbe3-cbar-rbe3 类型的焊缝效果
Bolt (Spider) –
仅 RBE2 单元,不连接 washer 节点
适合简单建模,模拟螺栓紧固连接。
螺栓建模Bolt (Spider)
Clip
– 仅 RBE2 单元,并连接 washer 节点
RBE2单元同时连接washer层节点,更好传递载荷。
螺栓建模 Clip
Bolt (General)
– 有 RBE2 螺柱,不连接 washer 节点
为了更好地模拟螺栓结构,在螺母和螺帽位置创建了RBE2刚性连接,并通过中间一根RBE2单元模拟螺柱。该RBE2单元可用于施加预紧力。
螺栓建模 Bolt (General)
Bolt (Washer2)
– 有 RBE2 螺柱,连接 washer 节点
在Bolt (General)的基础上,头尾的RBE2单元增加连接一层washer节点。螺柱单元可用于施加预紧力。
螺栓建模 Bolt (Washer2)
Bolt (Cbar)
– 有 Cbar 螺柱,不连接 washer 节点
因RBE2单元过于刚性,为了模拟螺柱直径,将螺柱通过Cbar单元建模并赋予材料、横截面信息。螺柱单元可用于施加预紧力。
螺栓建模 Bolt (Cbar)
Bolt (Washer1) Cbar
– 有 Cbar 螺柱,连接 washer 节点
在Bolt (Cbar)的基础上,再抓取一层washer节点,用于更好地传递载荷。螺柱单元可用于施加预紧力。

螺栓建模 Bolt (Washer1) Cbar
常见的胶粘连接信息有玻璃胶,车身上的结构胶及减震胶等。

玻璃胶
Adhesive粘胶
adhesive 粘胶创建六面体单元,并伸出 RBE3 单元,连接上下部件的节点。六面体单元的属性中,可以按照粘胶的类型(如玻璃胶、减震胶等)赋予不同的弹性模量。
Adhesive粘胶
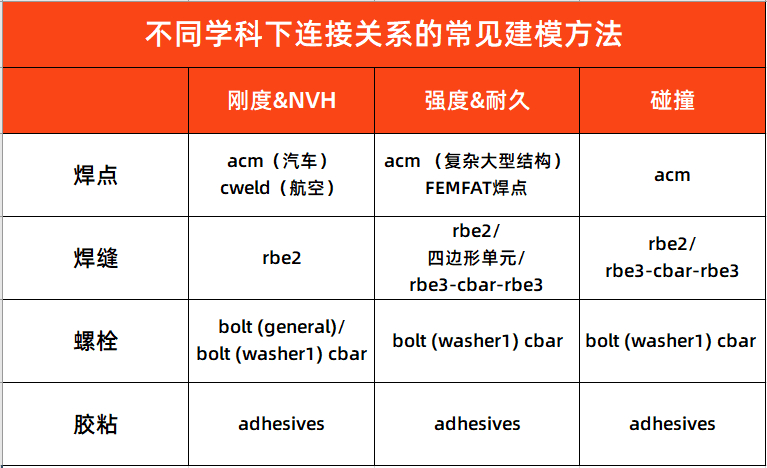
下表总结了不同学科下常见的连接关系建模方法。
这一期,我们汇总了有限元模型中各种连接关系的表现形式。下一期,我们将介绍在 HyperWorks 软件中的具体操作方法以及分享模型,不见不散哦!


