CFD专栏丨四旋翼无人机空气动力学仿真

四旋翼无人机的飞行原理
直升机有尾旋翼的设计是为了抵消主旋翼旋转时产生的旋转力矩,如果没有尾旋翼直升机的机体会向着主旋翼旋转方向相反的方向自旋。而四旋翼无人机采用十字型对称分布,四个旋翼互相抵消回旋影响,当平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。如果想转向的话,只要打破这个平衡就可以了。

按照图中的旋转方向,增加 1、4 的转速减少 2、3 的转速可以产生逆时针转动;反之,减少 1、4 的转速 增加 2、3 的转速可以在顺时针转动。如果想让无人机左平移,那么它就得降低左侧3、4两个桨叶的转速,提高右侧1、2两个桨叶的转速,这样无人机就会向左倾斜,根据力的分解,升力在水平方向的分力就会使无人机向左平移。
同理,当右侧低于左侧时,向右平移。当前面转速低于后面时,向前平移,当后面转速低于前面时,向后平移。如此通过调节四个旋翼的电机转速来实现:悬停、横滚、仰俯、偏航等多种飞行姿态的控制。
1
四旋翼无人机的空气动力学仿真
以往有不少采用传统NS方程的流体求解器来分析无人机的空气动力学问题,但是普遍会遇到如下问题:
计算效率不高:由于外流场的模型网格数量巨大,再加上四个旋翼的动网格区域使得这个瞬态模型算的比较慢,导致仿真跟不上设计迭代的节奏。
仿真精度不高:由于无人机属于低速飞行器,使得湍流的仿真比较困难,通常采用RANS的湍流模型难以达到满意的效果。
Altair ultraFluidX 是基于格子玻尔兹曼算法( LBM )的求解器,专门用于地面交通工具、低速飞行器和建筑外流场的仿真。优势在于:
低数值耗散,显式算法,全瞬态求解;
湍流模型采用Smagorisky LES大涡模拟;

ultraFludX采用的格子模型
3. 无网格技术,前处理仅需输入STL面。格子(Voxel)在GPU生成,一亿格子生成仅需20分钟,非常适合外流场大模型;
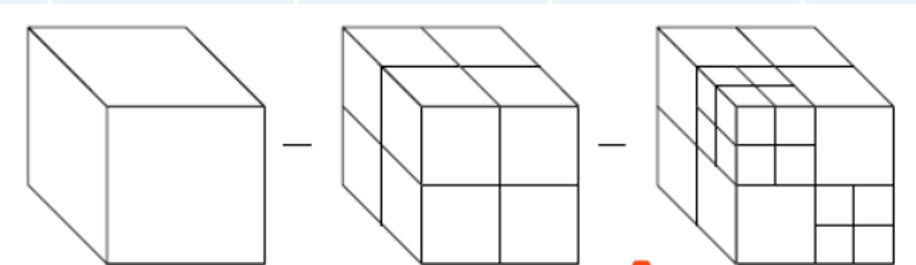
格子2^n方式加密
4. 重叠格子(Overset)技术,模拟风扇叶片的转动;
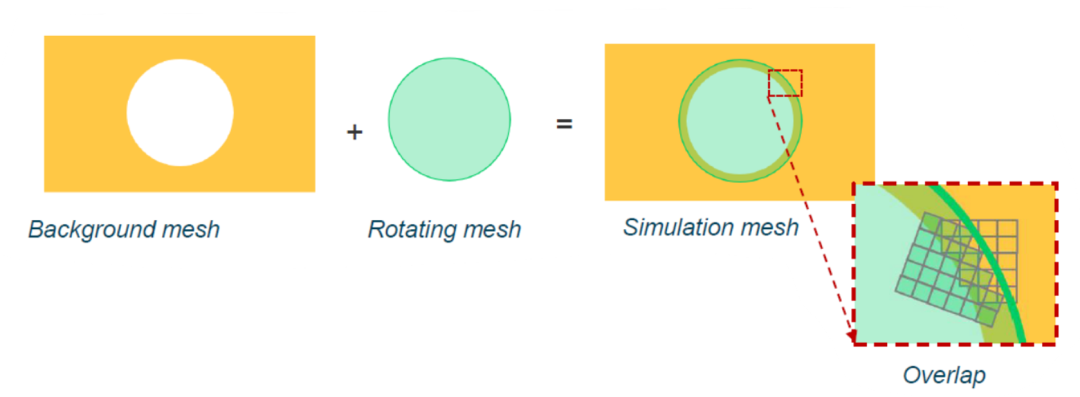
背景流体+风扇旋转区域,在动静交界面上格子部分重叠
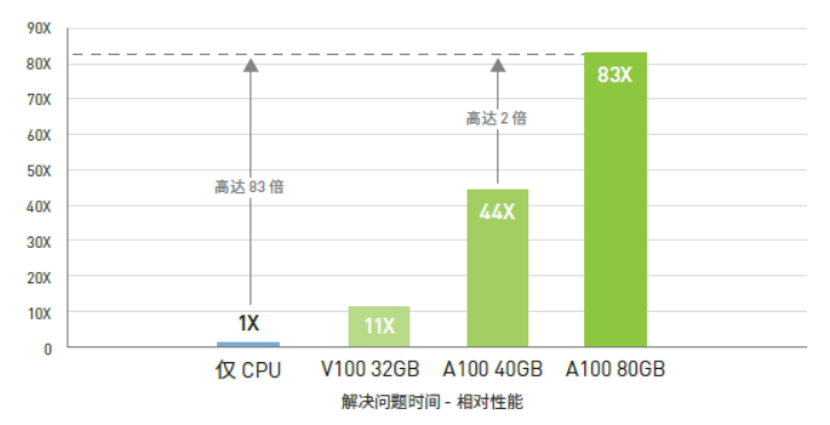
5. 完全基于Nvidia GPU加速,数亿格子的瞬态外气动模型用2张A100 Nvlink显卡半天左右即可算完。
2
分析流程
1. 在前处理HyperMesh中简单的处理一下CAD, 去掉小特征,封闭间隙,生成STL表面;
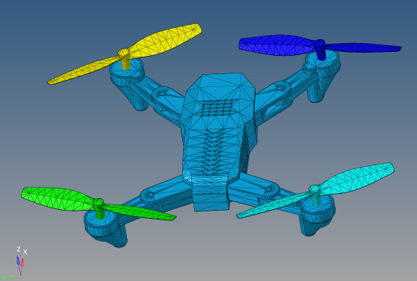
四旋翼无人机STL模型
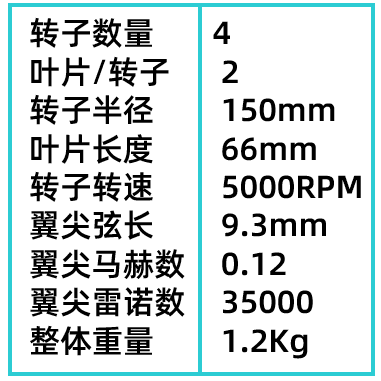
四旋翼无人机参数
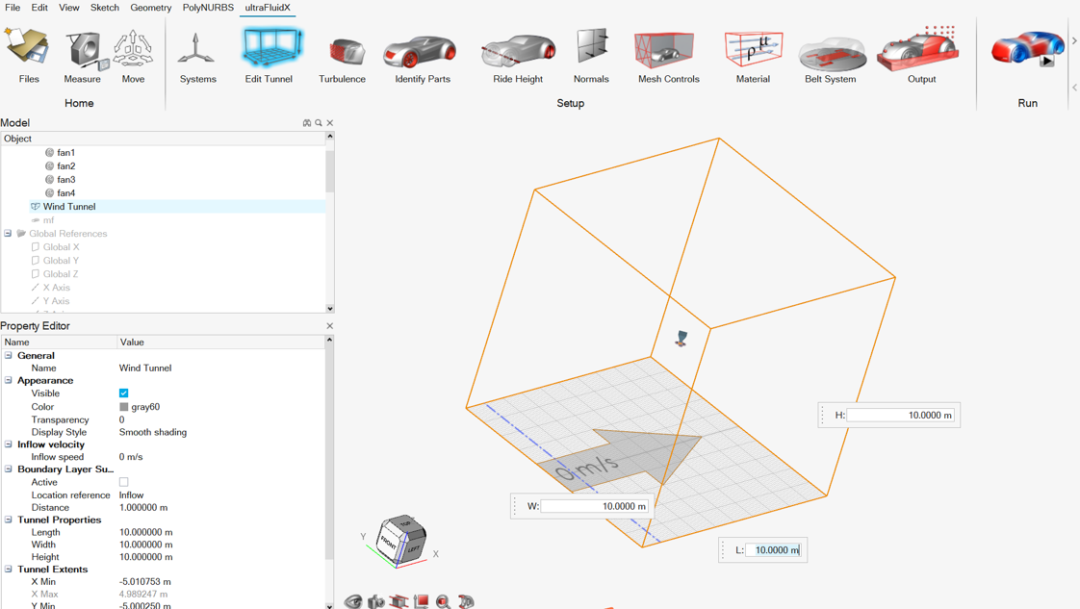
2. 在前处理模块虚拟风洞(VWT)中导入STL模型,设置风洞的参数;
3. 设置格子加密。包围无人机空间逐层加密,按照8,16,32mm….的规律,远场格子尺寸512mm;

4. 设置壁面的贴体加密区,机身表面2mm, 4层。桨叶表面1mm,4层;
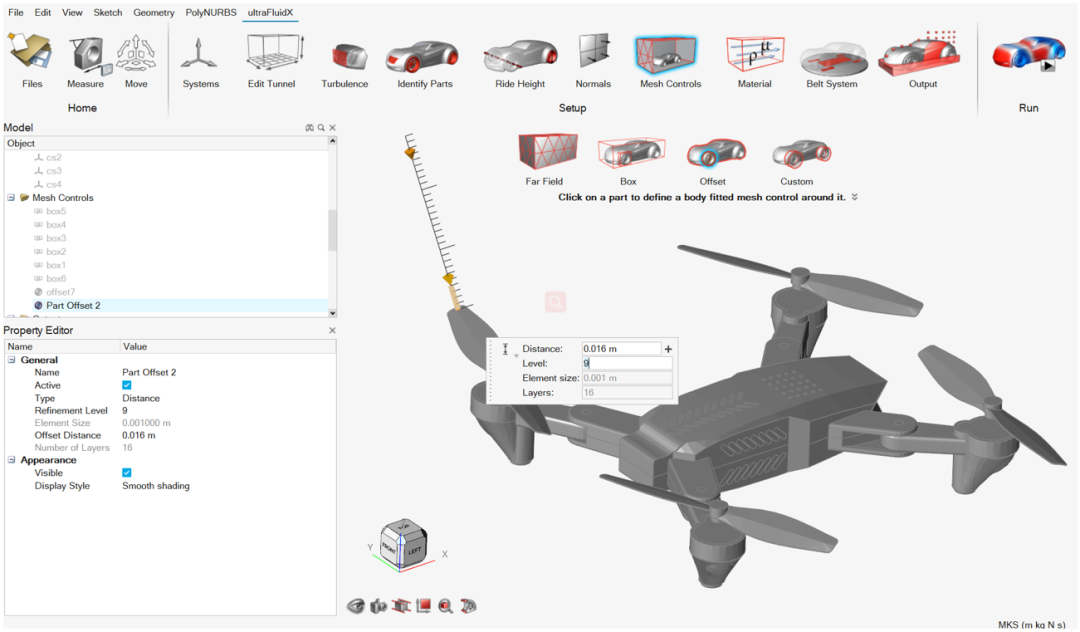
5. 设置旋翼区域,指定重叠格子的区域,叶片表面格子尺寸<1mm;

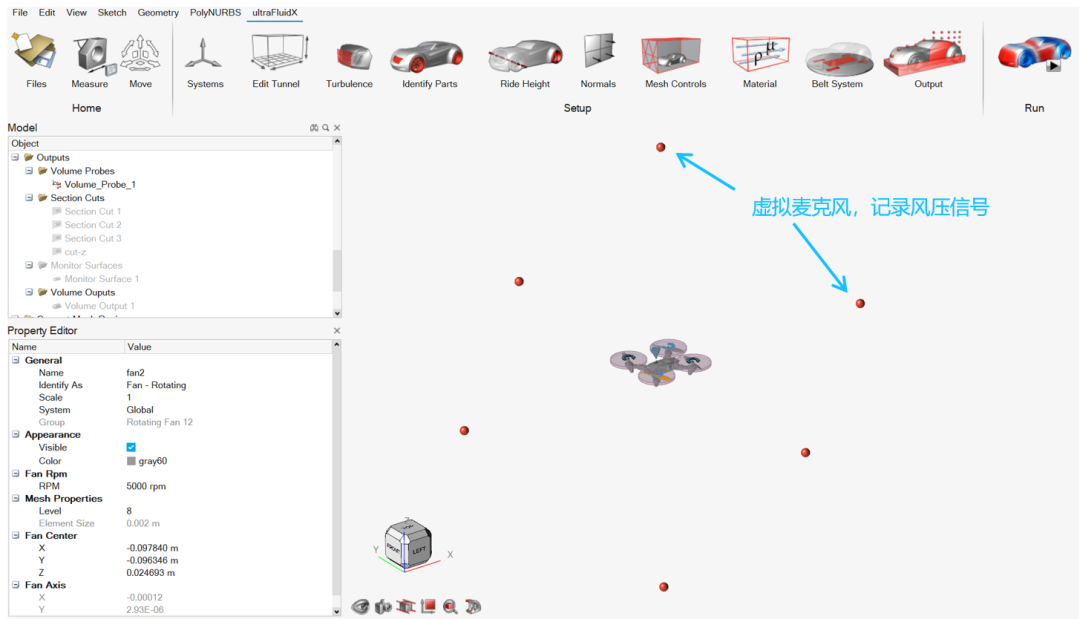
6. 设置流量监测面,或虚拟麦克风位置(可用于气动噪声的信号采集);
7. 如果有CAD设计变动,在VWT模块中导入外部文件,替换当前部件即可。参数设置可以存为模板,反复利用。

3
分析工况说明
分析了3个工况:
case1-悬停无风工况;
case2-悬停侧风5m/s;
case3-地面效应,离地间隙≈转子直径,无风
计算资源:
采用4张V100 GPU (32G PCIE)并行计算。模型格子总数1千2百万,仿真物理时间=0.22秒(桨叶转动18圈),计算时间2.6小时。(此设置仅为演示模型,如模拟气动噪声,需进一步加密格子)
4
CFD分析结果
格子加密规律:按照2^n逐层加密, 4个旋翼区域均匀加密,叶片表面和机身贴体加密。
动画:转子水平高度切面(仰视图)
Case1:悬停无风工况
可见叶片旋转的尾迹区对下游叶片的扰动,因此在翼型设计的时候并不能完全参考孤立翼型的空气动力学设计,否则会造成升阻力计算的偏差。同时也可以看到:四旋翼的翼尖流场有强烈的互相干扰作用。
动画:case1(仰视图)
动画:case1(侧视图)
对旋翼升力的分析:旋翼的翼尖线速度较高,从空间流线图可见叶片翼尖位置从压力面到吸力面产生了很强的翻滚气流,会导致翼尖的升力下降。相邻旋翼的桨叶运行至接近位置的时候,也会产生强气流扰动。
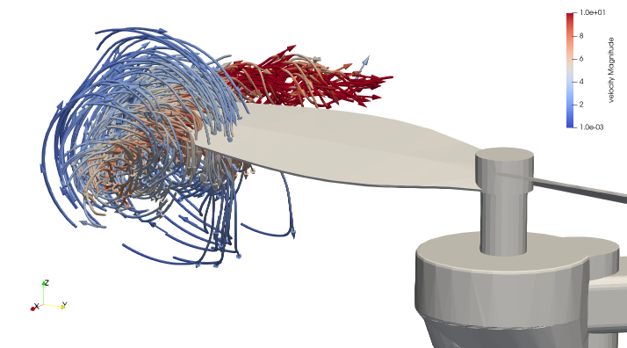
翼尖空气流线图,外侧位置
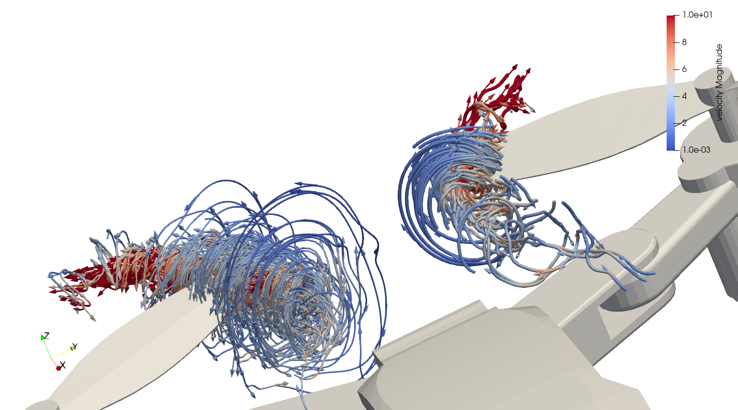
翼尖空气流线图,内侧位置,相邻叶片靠近
设想,参考固定翼的增升装置(Winglet),对旋翼进行改造,未来可进一步研究。

飞机机翼增升装置 Winglet
Case2:悬停侧风5m/s工况
来流风速对旋翼气流产生了干扰,四旋翼的旋转流场对称性被破坏,并可见机身下游产生了尾迹区。由于机身结构沿着水平中心线上下对称,在水平姿态几乎不产生升力,升力主要还是旋翼提供。
动画:case2(仰视图)
动画:case2(侧视图)
对比case1和case2的侧向气动力可见:无风工况几乎无侧向力,侧风工况产生了明显的侧向力,可能会影响机身稳定性。
在本次仿真中机身均处于固定水平姿态,转速恒定。而现实侧风情况下,飞控系统会根据传感器反馈微调4个电机的转速,产生反向力矩,从而保持稳定性。
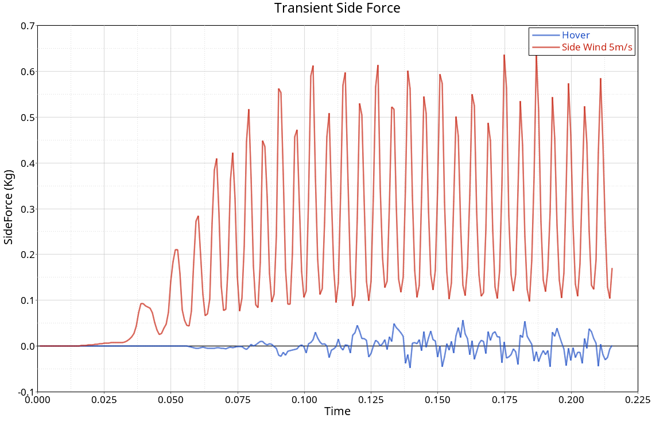
气动侧向力(蓝色-case1,红-case2)
Case3:地面效应工况
可见螺旋桨的下洗气流撞击地面,并向四周扩散,中心区的气流有部分来不及扩散,甚至产生了反冲。
动画:case3(仰视图)
动画:case3(侧视图)
对比case1和case3的垂直气动力可见:地面效应产生了约8%的升力增加。仿真模型采用了5000RPM的恒定转速,在现实情况下,飞控系统会略微降低电机转速,从而保证接近地面的时候稳定悬停。
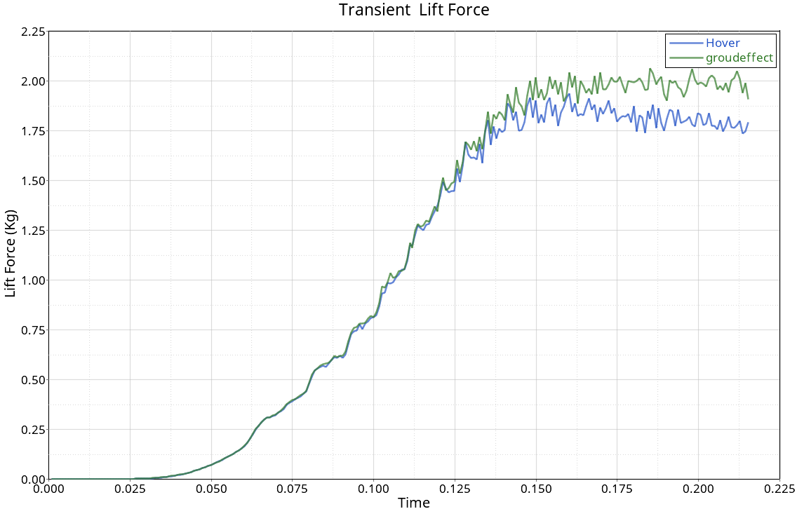
气动升力(蓝色-case1,绿-case3)
涡量(Vorticity)图可以显示出气流旋涡的形状和强弱。动画展示旋翼从静止逐步加速到额定转速过程中空间涡量等值面的变化。
动画:Case1 涡量等值面-发展
动画:Case1 涡量等值面-瞬时
5
总结
采用Altair虚拟风洞仿真工具分析四旋翼无人机的空气动力学模型。初步评估了悬停,侧风,地面效应三个工况。
LBM算法+GPU硬件平台使得仿真工程师可以更加准确和快速的分析空气动力学模型。随着Nvidia的新一代高性能计算显卡发布,计算效率会进一步提升。
本模型仅演示了气动力计算,气动噪声则要求进一步加密格子,满足格子截断频率(cutoff frequency)的要求。只需在前处理VWT模块修改加密尺寸即可。
未来可继续展开的工作:气动噪声的评估。比较不同旋翼转速,翼型设计,多种飞行姿态等工况。


