MBS技术专题丨模型分享:起重机作业过程仿真分析

综 述
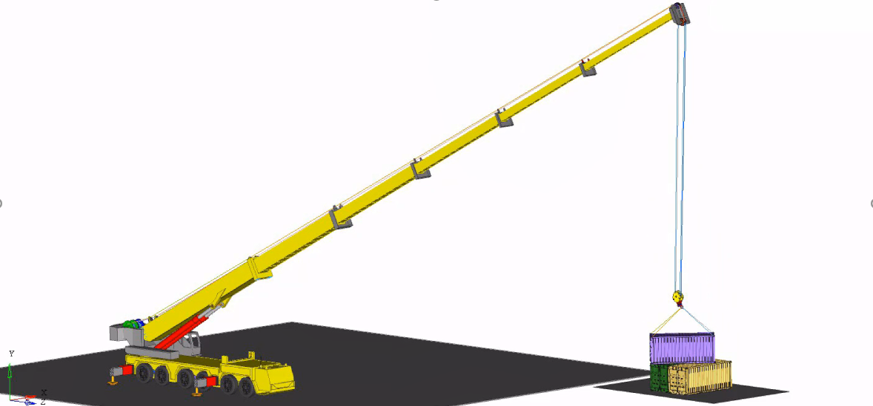
移动式起重机是一种带伸缩臂的缆索控制起重机,一般安装在卡车上以吊装物体。
移动式起重机可通过液压执行器和电机带动起重机旋转、伸缩臂展开/收缩、卷绕/松开缆绳吊装动作。其中,伸缩臂布置和起重机旋转确定了移动起重机的作业区域,增加配重和额外支架起到稳定的作用。
移动式起重机的动力学分析可以通过MotionView建模,用MotionSolve进行分析求解。
学习目标
仿真分析起重机吊装物体到到目标位置的作业过程;
通过刚柔耦合建模分析和预测伸缩臂的动态应力;
通过线缆工具(Multi-Disciplinary)实现对线缆的精确建模;
建立3D接触以评估外伸支架等构件的负载,进一步分析车辆的稳定性。
多体动力学模型
建模过程
步骤1:导入CAD数据,添加铰链和衬套连接;

步骤2:将主臂用柔性体(CMS),伸缩节用非线性梁(NLFE)建立;

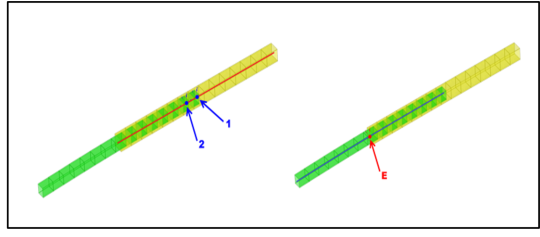
步骤3:使用点到变形曲线创建悬臂组件之间的高级副;
使用梁单元节点创建可变形曲线;
包括梁之间的先进节点(内梁节点1和2与外变形曲线/外梁节点E和内变形曲线);




作业工况定义
移动起重机作业过程仿真
移动起重机地面支撑座打开并锁住;
悬臂液压执行器使伸缩部分倾斜;
伸缩臂第一伸缩节展开;
伸缩臂旋转60度;
吊钩向下移动,吊装箱体;
伸缩臂旋转回初始位置;
伸缩臂每个伸缩部分展开;钩块向下移动,后松开放入相应的位置

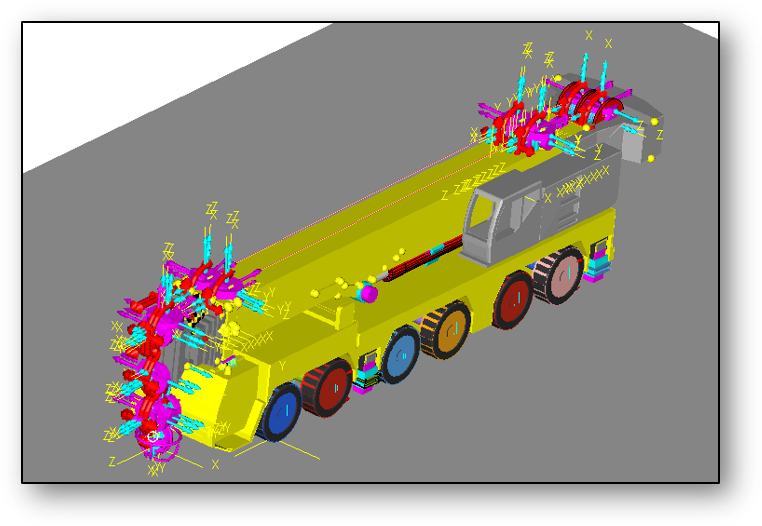
分析结果
主臂和其他伸缩臂应力
结果读取
整体应力状态
液压机构举升力

支撑座与地面接触力


地面支撑载荷

地面支撑载荷
线缆力

总 结
本文对移动起重机的作业过程进行多体动力学仿真分析,关键部位使用柔性体建模,仿真分析了起重机工作过程中的液压机构举升力、支撑座与地面接触力、线缆力及各个部件的动态载荷,仿真过程输出了柔性部件工作过程的动态应力,可对整个作业过程的稳定性、载荷分配和部件的强度性能进行评估和分析。


