固体大变形+流固耦合方法——物质点法(MPM)
文一:

广义插值物质点法
摘要
使用变分形式和Petrov–Galerkin离散化格式推广了计算固体力学的材料点法(MPM)离散解程序,产生了一系列称为广义插值材料点(GIMP)方法的方法。该泛化允许识别其他基于点或节点的离散求解技术的各个方面,这些技术不使用固定网格,即“无网格方法”。注意到了相似之处,并确定了与其中一些方法相比的一些实际优势。示例用于演示和解释MPM计算中可能出现的数值伪影噪声。这种噪声导致材料点的非物理局部变化,从而评估本构响应。在一种情况下,它会破坏显式解决方案,而在另一种情况中,它会严重降级。由于噪声输入,依赖历史的非弹性本构定律可能会错误地发展,并报告不准确的应力状态。噪声是由于插值函数缺乏平滑性,并且是由于材料点跨越计算网格边界而产生的。GIMP方法中可用的下一个平滑度被证明能够消除小区交叉噪声。

图:由缓慢增加的体力b引起的连续棒准静态压缩的数值和分析解。MPM溶液材料点应力用开三角形表示,连续颗粒GIMP溶液材料点应力用开圆表示。垂直线表示单元边界。实心对角线表示解析解。在增加柱重量的情况下获得解决方案。

图:针对不同粒子密度的MPM、GIMP和有限GIMP算法的收敛性研究结果。相对于精确解的误差是根据计算单元大小绘制的。计算的是柱在重力作用下的准静态压缩
文二:

颗粒材料的物质点法
摘要:
提出了一个颗粒材料模型,描述了每个颗粒的内部变形和颗粒之间的相互作用。该模型基于FLIP材料点、单元中粒子法,求解每个晶粒的连续本构模型。晶粒之间的相互作用是用接触算法计算的,该算法禁止相互渗透,但允许分离和摩擦滑动和滚动。细胞内颗粒法消除了单独接触检测步骤的需要。在接触模型中使用公共休息框架产生了计算成本与晶粒数量的线性比例。该模型的特性通过滑动和滚动接触的数值解来说明,颗粒材料的特性通过剪切计算来说明。数值计算结果表明,对于形状由计算网格解析的光滑颗粒,可以准确地对接触进行建模。

图:用于模拟倾斜平面上圆盘的几何图形。

图:可变形圆盘的质心位置(x分量)作为时间的函数(虚线),用于摩擦系数p=0.3和0.9以及倾角0=rr/3的模拟。为了进行比较,还显示了刚性圆盘(实线)的解析解。在计算解和分析解中,p=0.3的曲线高于p=0.9的曲线。
文三:

流固耦合问题的物质点法
摘要:
本文提出了一种新的材料点法,用于求解流体饱和土在大变形作用下的流体力学耦合问题。提出了一种基于Biot混合理论的土壤-孔隙流体耦合MPM算法,用于解决包括地下水位位置随时间变化在内的流体力学相互作用问题。通过将一维固结试验的模拟结果与相应的解析解进行比较,检验了所提出方法的准确性。
对所提出的方法中使用的MPM参数进行了灵敏度分析,以检查每网格粒子数和网格尺寸对求解精度的影响。为了证明该方法的能力,对一个大型堤防渗流破坏的物理模型实验进行了模拟。地下水位随时间变化的堤坝模型的行为与实验观测结果非常吻合。通过检查孔隙水压力以及模拟计算的有效应力,讨论了渗流引起的破坏机制。

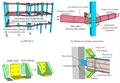
图:典型计算网格和粒子示意图,以及分析流程:(a)典型计算网格与粒子示意图;(b) 分析流程示意图

图:提出方法的操作流程

图:MPM模型和固结模拟结果:(a) MPM模型;(b) 孔隙水压力分布;(c) 固结度与时间因素

图:(a)颗粒的位置和(b)堤防中的偏剪切应变(膨胀角5 0.0)
文四:

考虑有限变形的岩土材料脆韧性破坏转变的相场隐式粒子域插值材料点法
摘要
提出了一种基于对流粒子域插值的相场隐式材料点法(PF-ICPDI),用于建立压敏土工材料在有限变形条件下的脆韧性破坏转变模型。在该方法中,采用基于微力平衡定律和热力学第二定律的相场断裂公式作为非局部损伤函数进行弹塑性断裂分析。利用光滑的双屈服面塑性本构模型来评估压敏土工材料的脆韧性破坏转变行为。通过引入有效相场应力并将总储存能量分解为弹性和塑性部分,建立了相场断裂模型和帽塑性模型的耦合效应。针对准静态弹塑性断裂有限变形问题,提出了隐式材料点法,该方法可以避免网格严重变形,提高数值稳定性。
此外,在模拟大变形脆塑性失效过渡过程时,采用了对流粒子域插值技术来消除数值噪声,提高材料点跨越单元边界时的计算精度。采用交错增量迭代法求解耦合离散控制方程。
通过几个具有代表性的数值例子证明了所提出的PF-ICPDI方法的准确性和能力,并讨论了主要材料参数对岩土材料相场脆性-韧性破坏转变模型的影响。

图:在弹塑性断裂建模中,通过选择相应的返回映射算法来更新本构关系的过程。

图:不同围压下平面应变压缩试验的等效塑性应变(a–g)和相场(h–n)的等值线:(a,h)σc=5 MPa,(b,i)20 MPa,(c,j)40 MPa,(d,k)60 MPa,(e,l)100 MPa,(f,m)σc=150 MPa和(g,n)200 MPa。
文五:

冲击和穿透模拟中材料点法的接触算法
标准材料点法(MPM)中固有的无滑动接触约束产生了更大的穿透阻力。因此,标准MPM不能很好地处理涉及冲击和穿透的问题。为了克服这些不足,提出了两种MPM的接触方法,并在我们的三维显式MPM代码MPM3D中实现。在MPM中,在每个时间步长开始时,重新定义的规则网格上可能不满足不可穿透性条件,即使在最后一个时间步长结束时已将其施加在变形网格上。物体之间的不可穿透性条件在第一接触方法中仅施加在变形网格上,而在第二接触方法中,它同时施加在变形格栅和重新定义的规则格栅上。此外,提出了三种方法用于冲击和穿透模拟,以确定满足接触表面共线条件的表面法向量。通过模拟两个弹性环的碰撞和球体滚动问题验证了接触算法,并将其应用于粒子失效模型模拟钢球穿透和厚板穿孔。在弹性环碰撞的模拟中,第一接触算法在总能量中引入了显著的扰动,但第二接触算法可以通过使用更大的时间步长来获得稳定的解。这两种接触算法似乎都能很好地解决其他问题,如球体滚动和弹丸穿透

图:MPM中的材料离散化

图:通过第一接触方法(=0.25)获得的弹性环在不同时间步长的配置:(a)t=0ms;(b) t=0.2毫秒;(c) t=0.4毫秒;(d) t=0.8毫秒;(e) t=1.8ms;
(f) t=2.8毫秒;(g) t=3.8ms;以及(h)t=4.8ms。

图:在V0=575m/s的打击速度下的弹-目标相互作用。Vr表示射弹的剩余速度:(a)实验照片,Vr=455m/s;(b) 模拟标准MPM,Vr=334.1m/s;(c) 模拟第一次接触MPM,Vr=442.8m/s;以及(d)第二接触MPM的模拟,Vr=453.4m/s。


