物质点法研究的最新进展
文一:

用于大应变岩土工程建模的隐式无锁定B样条物质点方法
摘要:
物质点法(MPM)在大变形、岩土工程问题的数值模拟中引起了极大的关注。MPM之所以受欢迎,主要是因为它的公式与有限元方法有很大的相似之处。在MPM中,迭代点可以独立于网格移动,从而解决大变形问题。然而,正因为如此,原始的MPM公式受到众所周知的细胞交叉噪声和体积锁定不稳定性的影响,导致强烈振荡的应力场。本文提出了一种新的隐式无锁定B样条MPM,它可以将应力振荡控制到可忽略的水平。一种新颖但非常简单的B样条形状函数实现程序,避免了对复杂材料点搜索算法的需要,提供了从原始MPM到这种鲁棒B样条MPM的无缝转换,旨在建模大应变岩土工程问题。新提出的体积锁定缓解策略也很容易实施,这有助于本研究的再现性。通过三个数值研究:颗粒柱倒塌实验、边坡破坏和大渗透基脚,验证了该方法的有效性。所提出的数值方法与文献中报道的实验和以前的数值研究非常一致。此外,这些数值例子表明,与其他可用的方法相比,所提出的方法提供了更突出的应力场。

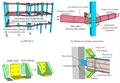
图:二维二次 B 样条 MPM 离散化的图解: (A)参数网格,(B)张量积网格。

图:颗粒柱坍塌实验图解

图:用不同方法模拟颗粒柱的坍塌: (A)无稳定的 BSMPM; (B) F-bar 方法的 BSMPM; (C)改进的 F-bar 方法的 BSMPM。B 样条物质点法

图:刚性条形基脚的大穿透模拟:(A)无稳定的BSMPM;(B) F-bar法BSMPM;(C) 改进F-bar法的BSMPM。B样条物质点法。
文二:

浅水流动与海底大变形耦合的材料点/有限体积法
摘要:
提出了一种混合材料点/有限体积法,用于水深测量中由大的动态变形引起的浅水波的数值模拟。所提出的模型由水流的非线性浅水方程和海床变形的动态弹塑性系统耦合组成。作为本构定律,我们考虑了一个线性弹性非缔合塑性模型,该模型具有Drucker Prager屈服准则,允许在不排水情况下发生大变形。这些模型之间的传递条件是通过使用从海底土壤和浅水之间界面的液压和摩擦项中采样的力来实现的。详细描述了混合材料点/有限体积法的耦合算法。研究了几个数值例子,以证明有限体积法模拟浅水流动和材料点法捕捉固相大变形过程的性能。我们还对引起浅水波的不排水粘土柱坍塌和溃坝问题进行了数值模拟,以证明所提出的混合材料点/有限体积方法的优异性能。

图:MPM的计算周期说明:(a)MPM积分阶段,(b)MPM溶液阶段,和(c)MPM对流阶段。

图:浅水域及其表示法。

图:静止水流中粘土柱坍塌的垂直应力等值线和无水表面轮廓的时间演变𝑅𝑤𝑠 = 1.0。
文三:

GIMP 与 CPDI 物质点耦合法模拟爆炸岩石三维断裂
摘要:
爆破引起的三维岩石破裂是一个高度复杂的问题,在岩土工程中受到了广泛的关注。材料点法首先被应用于处理这一具有挑战性的任务。通过将广义插值材料点(GIMP)与对流粒子域插值技术(CPDI)相结合,可以克服一些固有的弱点。对于钻孔中的介质,使用不变的GIMP型颗粒来保证均匀的爆破压力。为了避免岩石材料在钻孔附近出现假数值断裂,采用了CPDI四面体型颗粒。模拟了三维单孔岩石的爆破实验,以检验耦合模型在实际载荷和边界条件下的适用性。仿真结果与实验结果吻合较好。并分析了三维岩石破裂的机理。结果表明,岩石颗粒大小和材料参数在岩石损伤中起着重要作用。反射的拉伸波会在模型的下部造成严重损坏。瑞利波出现在岩石模型的顶面上,引起环向破坏带。

图:连续体的离散化和USF求解方案的过程。

图:不同岩石颗粒尺寸下的损伤等值线。

图:第一阶段的压力和损伤增长轮廓。
文四:

基于物质点法的碳化硅刮擦过程中砂砾几何形状引起的裂纹分类和转变研究
摘要:
在脆性材料的磨削中,微裂纹和残余应力通常被认为是实现无损伤表面的不可忽略的障碍。本文结合应力场分析、材料点法模拟和高速划痕实验,对经典压痕诱导裂纹系统中的各种裂纹进行解耦,以确定不同裂纹的诱导条件和耦合模式。对无压烧结碳化硅(S–SiC)的测试表明,砂砾几何形状在诱发不同裂纹方面至关重要。赫兹和横向裂纹系统主要由刮擦砂砾的前角决定,并且在−60的临界值附近可以从一个转变为另一个◦. 此外,提出了两点应力场模型来证明大的接触宽度是诱发径向裂纹的关键因素。相比之下,较大的接触深度与底部碎屑的出现有关。此外,还利用拉曼光谱研究了砂砾的速度对累积损伤的影响。除了堆叠无序和残余应力之外,在不同的接触速度和深度下,甚至Si–C键的断裂和同核键的形成等化学无序在划痕底部也是可变的。基于上述发现,提出了一个多层叠加模型来重新耦合不同裂纹的影响,并预测工件被球形砂砾刮伤的损伤/受力状态。实验证明,在特定条件下,钝磨料也可以实现低损伤加工。

图:MPM中刮擦模型的示意图。在恒定深度h和速度vs。红色 区域表示工件的损坏部分(D=1)。

图:实验系统。(a) 旋转划痕系统示意图。(b) 划痕试验的实验装置。(c) ~(d)两个金刚石砂砾的放大视图。

图:理论模型计算的构件应力场和应力梯度矢量的分布及其在MPM中对应的模拟场,具有不同的锥形砂砾前角γ(h=480nm,vs=60m/s)。对于(a)~(d),γ=−70◦; 对于(e)~(h),γ=−45◦. 为了更好地在MPM中显示应力场的形状,减小了彩色条的最大显示范围,并在每个彩色条旁边标记实际的最大和最小应力。

图:模拟不同前角γ(h=480nm,vs=60m/s)的锥形砂砾刮伤SiC的损伤分布和分类。鲜艳的红色颗粒表示完全损坏的部分(D=1)。在(a)和(b)中将未损坏的蓝色颗粒(D=0)设置为半透明,使得也可以观察到表面下的损伤(由暗红色颗粒表示)。(a) ~(e)是五种不同γ作用下损伤工件的顶视图。(f) ,(h)和(i)分别是(a)中工件的横截面和3D损伤视图。(g) ,(j)和(k)分别是(d)中工件的横截面和3D损伤视图。
文五:

基于材料点法的软磁机器人仿真框架
摘要:
仿真是机器人系统发展的一个关键方面。模拟真实世界机器人行为的能力提供了一个可以开发机器人设计和优化控制系统的环境。由于使用外部磁场进行驱动,磁性软机器人可以无线控制,并且易于小型化。然而,由于材料弹性和磁性扳手(力和力矩)之间的关系,磁性软材料和外部磁场源之间的关系在建模中呈现出显著的复杂性。在这项工作中,我们使用材料点法(MPM)提出了一个磁性软机器人的仿真框架,该方法将超弹性材料模型与磁场感应下的磁性扳手相结合。与现有的有限元方法(FEM)相比,所提出的基于MPM的框架固有地模拟了模型区域之间的自碰撞,并且可以捕捉非均匀磁场中的力的影响。我们展示了MPM框架对磁性扳手对磁性软机器人的影响进行建模的能力,捕捉机器人在时变磁场下的动力学行为,并提供与障碍物碰撞时变形的准确表示。我们通过将仿真与文献中先前提出的一系列真实世界的磁性软机器人设计进行比较,展示了MPM框架的多功能性。

图:MPM遵循的循环方法。(a) 在粒子域中计算内力和磁应力。(b) 粒子特性将传递到栅格表示。(c) 在网格域中计算外部相互作用和由磁梯度引起的力。(d) 粒子特性将从栅格中重建。

图:用于测量梯度力引起的 MSR 变形的实验装置。一个线性平台使机器人更接近梯度力更强的永磁体。这会导致 MSR 中的长度延长。


