深度学习(deep learning)预测物理模型
文一:

利用热红外和被动微波数据绘制无间隙全天候地表温度的两步深度学习框架
摘要:
混合来自热红外(TIR)和被动微波(PMW)测量的数据是生成全天候地表温度(LST)的一种很有前途的解决方案。然而,由于PMW数据中的条带间隙以及TIR和PWM数据之间的分辨率不一致,在使用传统方法的全天候LST中,空间细节往往不完整或产生相当大的损失。本研究旨在利用MODIS和AMSR-E LST数据,开发一个两步深度学习框架(TDLF),用于绘制中国陆地上的无间隙全天候LST。在TDLF中,开发了一个多时相特征连接的卷积神经网络双向重建模型,以获得空间完整的AMSR-E LST。然后,设计了一个多尺度多时相特征连接的生成对抗性网络模型,将空间完整的AMSR-E LST和多云天空MODIS LST相融合,生成无间隙的全天候LST数据。利用青藏高原(TP)和黑河流域(HRB)的6个现场LST数据,对无缝隙全天候LST数据进行了评估。无间隙全天候LST的均方根误差(RMSE)为1.71–2.0 K,在晴朗条件下的确定系数(R2)为0.94–0.98,均方根误差为3.41–3.87 K,R2为在多云条件下获得0.88–0.94。与现有的基于PMW的全天候LSTs相比,生成的无间隙全天候LST的验证精度和图像质量(如空间细节)都优越。TDLF不需要使用任何额外的数据,可以与其他卫星TIR和PWM传感器一起使用,以在全球范围内产生长期、无间隙、全天候的MODIS LST记录。这种能力有利于生成进一步的无缺口全天候土壤水分和蒸发蒸腾数据集,这些数据集都可以应用于全球气候变化研究。

图:(a) 中国大陆的土地覆盖图,以及两个验证子区域的图像:(b)黑河流域(HRB)和(c)青藏高原(TP)。土地覆盖图由MCD12Q1产品生成,包括14种土地覆盖类型。现场位置用红色三角形标记

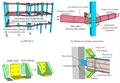
图:所提出的用于绘制无间隙全天候LST的两步深度学习框架(TDLF)的流程图,该框架主要由空间完整的PWM LST生成和无间隙全天气TIR-LST生成组成。

图:多时相特征连接卷积神经网络(MTFC-cnn)的网络结构与内核大小(abbr. k) ,特征映射数(abbr. k)。卷积层的跨度(缩写)。

图:2010年每月第15天白天原始和重建 AMSR-E LST 的时空分布比较: (a)原始 AMSR-E LST,(b)重建 AMSR-E LST。
文二:

基于天气预报和生成深度学习模型的太阳辐射多步预报
摘要:
随着计算机技术的快速发展,越来越多的深度学习模型被用于太阳辐射(辐照)预测。已经有很多研究讨论了这类模型的研究。然而,由于时间序列的复杂性和多步预测中误差的累积,如何将深度学习模型更好地应用于建筑能源系统的优化方法中,例如模型预测控制中的多步太阳辐射(辐照)预测模型,仍然是一个具有挑战性的问题。在这项研究中,开发了一个基于LSTM的深度生成模型,用于未来至少24小时的多步骤太阳辐射预测。东京气象厅的测量数据和温度预报数据用于本实验的训练和测试。结果表明,首先生成模型可以有效地避免误差积累的问题。与传统的回归LSTM模型相比,生成模型的精度提高了7.7%。其次,引入前一天的温度预测数据可以使预测精度提高约18%。当使用早期的温度预报时,预报精度会逐渐降低,而使用3天前发布的温度预报很难提高预报效果。最终,使用每小时温度预报将比使用每日温度预报获得更好的预报准确性。

图:使用单步回归模型时的误差累积。

图:模型的正演预测。

图:M.1的预测概念。
文三:

基于深度学习的全天候自主驾驶鲁棒定位
摘要:
由于便利性、安全性和潜在的环境效益的提高,人们对自动驾驶汽车的兴趣正在迅速增长。尽管几家领先的AV公司预测,到2020年,AV将在路上,但它们仍然局限于相对小规模的试验。由于传感器在恶劣的环境和天气条件下存在缺陷,因此了解其在地图上的精确位置是安全可靠的AV的一个具有挑战性的先决条件,这对其广泛使用构成了巨大障碍。在这里,我们提出了一种基于深度学习的自我监督自我运动估计方法,这是一种在恶劣天气条件下稳健且互补的定位解决方案。所提出的方法是一种几何感知方法,它使用基于注意力的学习技术,专注地融合了视觉传感器的丰富表示能力和雷达提供的天气免疫特征。我们的方法预测了传感器测量的可靠性掩码,消除了多模态数据中的缺陷。在各种实验中,我们证明了在恶劣的天气条件下,如雨、雾、雪以及昼夜条件下,具有强大的全天候性能和有效的跨领域可推广性。此外,我们采用博弈论方法来分析模型预测的可解释性,说明了多模态系统的独立和不相关故障模式。我们预计,我们的工作将使电动汽车离安全可靠的全天候自动驾驶又近了一步。

图:GRAMME概念框架和架构概述。a、 公开可用的独立AV数据集是在可变环境照明和降水等不同设置下使用相机、激光雷达和雷达等多个传感器收集的。来自RADIATE数据集17的示例多峰测量被示出以说明数据类型和由不利条件引起的传感器测量的退化。b、 场景几何和自我运动的自监督估计的体系结构概述。DepthNet和VisionNet模块分别预测每个相机帧的像素深度图和连续相机帧之间的自我运动。同时,RangeNet和MaskNet模块在距离传感器(即激光雷达和雷达)上运行,分别预测自我运动和输入掩码。FusionNet收集未对齐的单个运动预测作为输入,并预测最终运动。最后,空间变换器模块使用多模式预测并对场景进行几何重建,从而创建监督信号(L)。

图:多模式、模块化和可推广的深度预测性能。a、 定性结果和样本测试框架16,以可视化GRAMME在深度预测方面的泛化能力。我们使用训练集中的日期序列来训练每个模型,并在不同的条件下对其进行测试,以分析泛化性能。GRAMME成功地利用了传感器的互补方面。b、 监督模型的泛化性能相对较弱。c、 将GRAMME的自监督泛化性能与地面实况监督和模态内性能进行比较的定量结果。仅在相机上训练的模型在所有具有挑战性的测试条件下都极易失败。尽管基于激光雷达和雷达的模型在质量上提供了相似的结果,并且总体上提高了整体性能,但使用雷达训练的模型对降水具有更大的免疫力。误差条表示相对于地面实况的深度预测误差。相机融合模型采用立体设置

图:不同环境下可推广的多感觉自我运动估计的传感器相关掩码预测和性能评估。a、 示例帧16、多模式测量和相应的预测掩码的说明。每一行显示一对输入测量值和每个模态的预测掩码。白色 区域和深色 区域分别代表测量中的有效点和无效点,以有效捕捉由恶劣天气和固有传感器缺陷引起的多传感器退化。b、 自我运动估计和多感觉融合的多模态性能评估。方框图显示了中位数、第一和第三个四分位数以及最小和最大四分位数,以显示运动预测中的误差。对于每个模态的运动的平移和旋转分量,显示了运动预测中以误差四分位数表示的误差分布。传感器融合极大地提高了整体运动估计性能。

图:可解释性和数据集大小相关的性能。a、 GRAMME的博弈论可视化,用于基于样本帧的SHAP值来解释深度预测16。由红色点注释的像素增加了深度预测的准确性,而蓝色点降低了准确性。眩光、较差的照明和恶劣的天气等具有挑战性的条件导致被遮挡像素周围的蓝色 区域集中。然而,激光雷达和雷达数据的训练有助于模型在不同的测试条件下关注语义不变的像素,如静态物体和道路边缘周围的红点所示。数值的分布说明了所提出的多模态系统的独立和不相关的故障模式。b、 GRAMME在平均深度预测误差方面的数据集大小相关性能,具有相对于深度地面实况的标准偏差。尽管激光雷达-相机(立体声)和雷达-相机融合提高了整体性能,但由于多模式架构所需模型的复杂性增加,访问最小数据(例如,仅25%)会导致性能比相机差。另一方面,尽管模型复杂,但激光雷达和基于雷达的模型在所有测试条件下都实现了良好的性能(与基线方法相比),数据集大小至少为50%。
文四:

使用深度学习方法对新型冠状病毒肺炎进行基于天气和人口的预测
摘要:
新型冠状病毒在全球的传播对各种利益相关者产生了重大影响,并对研究界提出了重大挑战。政府已经采取了几项措施来保持社交距离和控制疾病,但对于像印度这样的发展中国家来说,这仍然不够,因为他们对这个问题的了解程度很低,因此这对医疗保健专业人员来说是一个重大挑战。因此,必须预测可能的病例数量,以便政府和医院做好解决问题的准备,并采取措施控制疾病系列的传播。通过考虑天气和新冠肺炎数据(康复、感染和死亡)的特征,建立了深度学习模型,以预测印度的预期病例数。该模型基于从印度次大陆收集的每日天气和新冠肺炎数据,建立在并发神经网络(CNN)、递归神经网络(RNN)、双向RNN(BRNN)、长短期记忆(LSTM)和双向LSTM(BLSTM)的基础上。结果表明,与其他模型相比,BRNN算法产生了更好的预测模型。

图:气候条件和病毒爆发的影响

图:印度预计人口(截至2020年12月30日)。b印度的人口密度
文五:

使用机器学习应用程序分析冠状病毒疾病(COVID-19)病例
摘要:
今天,全世界都在思考冠状病毒疾病,这意味着即使是这种流行病也不是唯一的。本研究的目的是检测机器学习应用程序和算法在调查和处理新冠肺炎的各种目的中的作用。通过在Science Direct、Springer、Hindawi和MDPI中使用新冠肺炎、机器学习、监督学习和无监督学习作为关键词,对2020年期间发表的与该主题相关的研究进行回顾。获得的总文章数为16306篇,但在限制之后;本研究仅收录了14篇相关研究。我们的研究表明,机器学习可以在新冠肺炎调查、预测和辨别中发挥重要作用。总之,机器学习可以参与卫生服务提供者的计划和计划,以评估和分类新冠肺炎病例。监督学习比其他无监督学习算法显示出更好的结果,测试准确率为92.9%。在未来,可以利用递归监督学习来获得卓越的准确性。

图:机器学习类型和任务概述


