了解锂离子电池的退化对于释放其全部潜力至关重要。理解不足会导致过度工程导致能量和功率密度降低,或者相反会增加安全风险和故障率。热管理对于所有大型电池组都是必要的,但实验研究表明,热管理对退化的影响还没有得到充分的了解。在这里,我们使用经验证的三维电热降解模型研究了热梯度对非均匀降解的影响。我们通过在数小时内运行数百个循环的分布式模型,再现了热梯度对降解的影响,并再现了加速降解速率的正反馈机制。电池活性区域内仅3°C的热梯度产生了足够的正反馈,使电池退化加速300%。在这里,我们表明,不均匀的温度和电流对退化的影响不能也不应该被忽视。基于集总模型(即没有热梯度)再现真实细胞水平退化的大多数尝试都遭受了严重的过拟合,导致对退化速率得出错误的结论。
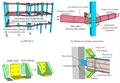
图:袋式电池电热模型的示意图。灰色和橙色 区域分别表示铝和铜集电器的计算域。蓝色和红色网络构成了每个电极对子域的电学和热学模型。
图:循环降解结果为6 C 放电和2 C 电荷的表面冷却和突片冷却方案。
采用碳纳米管 x 射线源阵列的体积 X射线计算机断层成像,提高图像质量和准确性
锥形束计算机断层扫描(CBCT)广泛应用于医学和牙科成像。与多探测器CT相比,它可以在减少辐射剂量、成本和占地面积的情况下提供具有高各向同性分辨率的体积图像,而无需患者平移。目前的CBCT有几个固有的局限性,包括软组织对比度降低、X射线衰减定量不准确、图像失真和伪影,这些限制了其临床应用,主要局限于硬组织成像,并使定量分析具有挑战性。在这里,我们报道了一种多源CBCT(msCBCT),它通过使用来自碳纳米管场发射源阵列的多个窄准直和快速扫描的X射线束来克服传统CBCT的缺点。体模成像研究表明,与CBCT配置相比,ms CBCT将Hounsfield单位值的精度提高了60%,消除了锥形光束伪影,扩展了轴向覆盖范围,并将软组织对比度与噪声比提高了30-50%。
图:碳纳米管(CNT)场发射 X 射线源阵列的照片和表征。
图:临床CBCT M、N1 ms CBCT和ms CBCT扫描的对比体模的Hounsfield单位(HU)均匀性和矢状图像
交通基础设施使社会得以运转。这些系统通过制造业转型和技术升级不断改进。然而,其物质降解的代谢机制以及从消耗到报废的数量仍不清楚。在这里,我们估计了中国典型大型公共交通工具(LPTV)的回收潜力,特别是预测了2000年至2050年间铁路和航空设备的报废数量。它们的总回收潜力一直在快速增长。2020年的报废总量超过3300万吨,预计到2050年将再达到7400万吨,大约是年的两倍2020年。到2050年,中国的废LPTV将至少含有7200万吨钢铁、838千吨铝、2539吨钛和223吨钕。我们还将废弃LPTV与电子垃圾和报废私家车进行了比较。有趣的是,从产业生态学的角度来看,它们的发电量增长表明了一个明显的产业演替。
图:2000年至2050年中国废弃LPTV的估算。
图:2010-2050年中国产品废弃物产生量的增长率。
在航空和航天工程中,监测载荷变化时的飞机结构健康状况至关重要。然而,负载方程需要通过地面测试来校准,这是昂贵且低效的。在这里,我们报告了一个基于深度学习的通用飞机载荷模型,用于通过两阶段过程进行应变预测和载荷模型校准。首先,我们确定了关键飞行参数和菌株之间的因果关系。然后将预测方程集成到监测过程中,以建立更通用的负荷模型,用于负荷系数校准。该模型对一个拥有200万飞行记录数据的原型系统实现了97.16%的预测准确率和99.49%的拟合优度。该模型减少了地面测试的工作量,并通过调整飞机参数提供了更准确的载荷预测。
图:所提出的深度学习多模型的预测性能以及与基线的比较。
Lab2Field 传输机器人树莓收获机由一个软感应物理双胞胎启动
机器人水果收割需要灵巧地处理娇嫩的作物,并依靠只有在收获季节才能进行的田间测试进行开发。在这里,我们专注于树莓作物,并探索如何通过软机器人技术加速收割机器人的研究方法。我们提出并演示了一种收割环境的物理双胞胎:一种具有可调特性的树莓植物的传感物理模拟器,用于在实验室中训练机器人收割机,无论季节如何。双胞胎身上的传感器可以与人类演示进行直接比较,用于调整机器人控制器。在早期的现场演示中,在没有对实验室训练的机器人进行任何修改的情况下,收获成功率达到了80%。
图:使用传感物理双胞胎开发树莓收获机器人并在实验室2现场转移的概念和实现。
图:收割过程中机器人和物理双胞胎的示意图和传感器响应。
图:在实验室和现场采摘树莓的全机器人管道的图像序列。