AI算法解决工程问题前沿研究
文一:

基于机器学习方法的钢屈曲约束支撑框架地震反应与性能预测
摘要:
目前,屈曲约束支撑框架(BRBF)已被用作中低层建筑的侧向力抵抗系统。BRBF的剩余层间漂移(RID)在决定地震激励后的建筑改造中起着关键作用;然而,现有的公式有局限性,不能有效地帮助土木工程师,例如FEMA P-58,这是一种保守的估计方法。因此,需要提供一种综合性的工具来估计层间漂移(ID)和RID的地震响应,并采用新的方法来弥补现有公式的不足。机器学习(ML)方法是一种跨学科的方法,可以解决这些类型的工程问题。因此,本研究提出了ML算法,为确定BRBF的地震反应、地震性能曲线和地震失效概率曲线提供了一个预测模型。为了训练基于ML的预测模型,对受78次远场地面运动影响的2至12层BRBF进行了非线性时程分析(NTHA)和增量动态分析(IDA),并为不同的预测目的准备了606944个数据点。结果表明,所考虑的方法是合理的。例如,所提出的ML方法能够预测4层BRBF的最大ID、最大RID和最大屋顶ID,准确率甚至分别为98.7%、95.2%和93.8%。此外,还引入了一种通用的初步估计工具,以根据研究中考虑的输入参数提供预测。

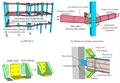
图:在 ETABS 2016软件中建模的6层建筑的3D 视图。

图:X方向间隔长度为9.14m的BRBF的详细信息。

图:初步预测工具,使用提出的最大似然算法预测地震反应和性能曲线的 BRBF
文二:

蝠鲼觅食优化:一种适用于工程应用的有效仿生优化器
摘要:
提出了一种新的生物激励优化技术——蝠鲼觅食优化(MRFO)算法,旨在为解决实际工程问题提供一种新的优化方法。该算法的灵感来源于蝠鲼的智能行为。这项工作模拟三种独特的蝠鲼觅食策略,包括链觅食,旋风觅食和翻筋斗觅食,以发展一个有效的优化范式来解决不同的优化问题。在基准优化函数和八个实际工程设计案例的基础上,通过与其他最先进的优化器的比较,对 MRFO 的性能进行了评估。基准函数的比较结果表明,MRFO 远远优于其竞争对手。此外,实际工程应用表明,该算法在处理具有挑战性的问题时,在计算量和求解精度方面都具有优势。MRFO 算法的 MATLAB 代码可在 https://www.mathworks.com/matlabcentral/fileexchange/73130-manta-ray-foraging-optimization-MRFO 找到

图:(A) 一种正在觅食的蝠鲼,以及(B)蝠鲼的结构。

图:二维空间中的链式觅食行为。

图:用于二维单峰基准函数的三维地图。

图:从 MRFO 和其他单峰函数算法中获得的条形图。

图:单峰函数算法的收敛性比较。

图:焊接梁设计。
文三:

利用深度学习对废钢进行分类和评级
摘要:
为了解决传统手工方法对废钢进行分类和评级时存在的人为干扰大、效率低的问题,我们提出开发CSBFNet,这是一种基于深度学习的多类别废钢分类和评级模型。首先,我们建立了一个1:3的废钢质量检测物理模型,以模拟卡车卸货。我们使用高分辨率视觉传感器来捕捉各种钢屑的形态特征。接下来,我们使用这些数据训练CSBFNet模型,以获得用于分类和判断各种类型废钢的特征信息。最后,我们在中国某钢厂对CSBFNet模型进行了测试和改进。结果表明,该模型可以有效地确定不同级别废料的自动评级。所有类型废钢的全类平均准确率达到92.4%,mAP为90.7%。与传统的人工质量检测方法相比,该方法在准确性和公平性方面具有明显优势。该模型解决了废钢回收过程中的质量评价问题。

图:现场废钢收集流程。

图:CSBFNet模型网络图。

图:SPPF模块结构图。

图:模型测试效果。(a)和(b)是实验室废料,(a)是原始数字(b)是检测后的结果; (c)(d)是 CSBFNet 模型在废料回收场的检测效果,(c)是原始数字(d)是检测后的结果。
文四:

利用定制的Faster R-CNN和简化的Hough变换实现钻孔裂缝的自动检测和表征
摘要:
从钻孔图像中了解裂缝的地质信息对于在工程中进行彻底的地质分析至关重要。最近,卷积神经网络(CNN)已被用于从图像中提取裂缝的高级特征。我们提出了一种用于裂缝检测的改进的Faster R-CNN(基于区域的CNN)模型,该模型适当地配备了用于井眼裂缝的定制区域建议网络f-RPN。f-RPN生成的锚被专门设计为具有固定宽度和不同高度,并且只有在并集值上具有最大交集的锚被标记为正。利用钻孔图像的循环特征,将图像扩展到四个方向,以增加模型输入的数量和多样性。该模型的检测结果可以进一步用于简化Hough变换,以表征裂缝的倾角和倾角方向。通过水利工程多个项目的钻孔图像验证了该方法的有效性。实验表明,平均检测准确率约为91.5%,与最初的Faster R-CNN相比,提高了11.06%。进一步的分析表明,f-RPN和多方位展开都有助于提高预测精度。研究还表明,该方法对模糊图像背景具有较强的鲁棒性,在噪声存在的情况下优于传统的图像处理方法。通过简化的Hough变换进行的裂缝表征在计算上是高效和准确的,绝对误差小于5◦与手动识别结果相比。

图:所提出的裂缝检测和表征方法的框架。

图:井壁中的裂缝及其几何描述:(a)将圆柱形井壁扩展为平面井壁图像,以显示井壁上的裂缝痕迹;(b) 同一井壁的示意图(灰色),用于说明正弦曲线和裂缝之间的几何关系(绿色)

图:f-RPN增强了Faster R-CNN的结构。

图:由原始RPN(左)和f-RPN(右)生成的锚点。

图:钻孔图像按照四个不同的方向展开,以获得对钻孔壁上相同裂缝痕迹的不同描述。
文五:

使用深度强化学习控制裂缝扩展
摘要:
嵌入材料中的机械不连续性在决定整体机械、物理和化学性能方面起着至关重要的作用。控制机械不连续性的能力与依赖天然、合成和复合材料的行业相关,例如建筑、航空航天、石油和天然气、陶瓷、金属和地热行业。本文是控制机械不连续性传播的强化学习框架的概念验证开发。强化学习框架与基于OpenAI Gym的环境相结合,该环境使用控制机械不连续性传播的机械方程。学习主体不明确地知道不连续性传播的潜在物理;然而,学习主体可以通过与环境的连续交互来推断控制策略。马尔可夫决策过程的设计是鲁棒控制的关键,它包括状态、动作和奖励。实现了深度确定性策略梯度(DDPG)算法来学习连续动作。还观察到,训练效率在很大程度上取决于奖励函数的公式。迫使学习主体停留在裂纹尖端和目标点之间的最短线性路径上的奖励函数比旨在以最小步数到达最接近目标点的奖励函数表现得更好。在近500次训练后,强化学习框架成功地控制了材料中不连续性的传播,尽管传播路径由多个目标点决定。

图:在用于3个不同训练集的2D无限材料中的三个不同且独立的传播路径。

图:裂纹扩展路径(左)和相应的行动(右)所采取的 RL 代理在随机选择的早期阶段的训练(第50,150和220集)。

图:裂纹扩展路径(左)和相应的行动(右)所采取的 RL 代理在随机选择的早期阶段的训练(第50,150和220集)。

图:强化学习部署阶段的三个测试阶段(第100、300和500集)的强化学习与模拟退火优化的比较。浅线表示强化学习剂的控制结果,而暗线表示模拟退火的优化结果。


