PINN(物理知情神经网络)在固体力学当中的应用
文一:

一个完整的基于物理知情神经网络的结构拓扑优化框架
摘要:
近年来,物理知情神经网络(PINN)在拓扑优化领域得到了越来越多的关注。深度学习和拓扑优化的融合已成为深入研究的一个突出领域,其中神经网络中损失函数的最小化可以与拓扑优化中目标函数的最小化相媲美。受PINN概念的启发,本文提出了一个新的框架,“基于完全物理信息的神经网络拓扑优化(CPINNTO)”,以应对拓扑优化中的各种挑战,特别是与结构优化有关的挑战。所提出的框架的关键创新在于通过集成两个不同的PINN,引入了第一个基于完整机器学习的拓扑优化框架。本文采用深能量法(DEM)PINN对相应结构的变形状态进行了数值求解。此外,在灵敏度分析PINN(S-PINN)中,目标函数相对于设计变量的推导被自动微分所取代。通过几个案例研究评估了CPINNTO框架的可行性和潜力,同时强调了在拓扑优化中使用PINN的优势和局限性。随后的研究结果表明,CPINNTO可以在没有标记数据和有限元分析的情况下实现最佳拓扑。数值算例表明,CPINNTO能够稳定地获得各种拓扑优化应用的最优结构,包括柔度最小化问题、多约束问题和三维问题。与通过基于密度的拓扑优化获得的设计相比,所得到的设计表现出有利的顺应性值。总之,所提出的CPINNTO框架为结构拓扑优化开辟了新颖而有趣的可能性。

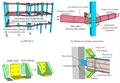
图:CPINNTO框架空间坐标示意图𝑥, 𝑦 作为输入和设计变量𝜌 作为输出。

图:DEM PINN空间坐标示意图𝑥, 𝑦 作为输入和位移𝑢, 𝑣 作为具有作为损失函数的总势能的输出。

图:DEM-PINN的架构。NN的输入是空间坐标x,y,它通过由线性层和Tanh激活函数组成的隐藏层传播,以输出相应的位移𝑢, 𝑣。

图:针对合规性最小化问题的S-PINN体系结构概述。将设计域的空间坐标作为输入提供给S-PINN,以将设计变量作为输出。然后,输出用于通过物理模型计算目标函数,以计算S-PINN的损失函数。

图:S-PINN的体系结构。NN的输入是空间坐标𝑥, 𝑦 其通过由线性、批量归一化层和LeakyRELU激活函数组成的隐藏层传播,以输出相应的密度𝜌。

图:基于相邻单元的密度来分配单元密度的密度插值方案。使用边缘填充和平均池化操作将设计域中的单元密度转换为采样点密度。

图:CPINNTO在SIMP设计的不同边界条件和负载配置下的标准符合性最小化问题的验证。

图:尖端加载悬臂梁的收敛历史:a迭代10,b迭代20,c迭代50,d迭代100,e迭代150和f最终拓扑。
文二:

基于物理知情神经网络的拓扑优化(PINNTO)结构优化框架
摘要:
近年来,物理知情神经网络(PINN)在计算力学领域引起了越来越多的关注。本文提出了一种新的拓扑优化框架:基于物理知情神经网络的拓扑优化(PINNTO)。与现有的基于机器学习的拓扑优化框架不同,PINNTO采用基于能量的PINN来代替传统结构拓扑优化中的有限元分析(FEA),以数值方式确定变形状态,这是所提出方法的一个关键新颖之处。训练尊重通过偏微分方程定义的支配物理定律的监督神经网络,以在没有任何标记数据的情况下开发相应的网络,从而解决固体力学问题。为了评估所提出的PINNTO框架的可行性和潜力,已经实施了许多与拓扑优化相关的案例研究。随后的研究结果表明,PINNTO有能力在既没有标记数据也没有有限元分析的情况下获得优化的拓扑结构。此外,它还能够生成与当前成功方法(如带惩罚的固体各向同性材料(SIMP))产生的设计类似的设计。基于这项研究的结果,还可以推断出,在对相关的基于能量的PINN正确施加边界条件和负载配置的情况下,PINNTO可以获得各种类型的复杂域的最优拓扑。因此,所提出的PINNTO框架已经证明了在有限元分析的使用受到挑战(如果不是不可能的话)的条件下解决问题的有希望的能力。总之,所提出的PINNTO框架为这个“数据丰富”的时代的结构设计开辟了一条新的途径。

图:基于能量的PINN的示意图,空间坐标x,y作为输入,位移u1,u2作为输出,总势能作为损失函数。

图:位移场u,v的PINN解和相对于FEA的解。

图:密度插值方案。使用最大池化操作将设计域中的元素密度转换为采样点密度。

图:通过不同边界条件下的经典顺应性最小化问题验证PINNTO。
文三:

基于物理信息的神经网络识别固体力学材料特性的有效数据采样策略和边界条件约束
摘要:
材料识别对于理解力学性质和相关力学方面的影响之间的关系至关重要。然而,材料识别是一项具有挑战性的任务,尤其是当材料的特性在自然界中是高度非线性的时,这在生物组织中很常见。在这项工作中,我们通过物理信息神经网络(PINN)识别连续固体力学中的未知材料特性。为了提高PINN的准确性和效率,我们开发了对观测数据进行非均匀采样的有效策略。我们还研究了将狄利克雷型边界条件作为软约束或硬约束的不同方法。最后,我们将所提出的方法应用于一组不同的时间相关和时间无关的固体力学实例,这些实例跨越线性弹性和超弹性材料空间。估算的材料参数的相对误差小于1%。因此,这项工作与各种应用相关,包括优化结构完整性和开发新型材料。

图:五个经典的固体力学例子。示例的几何结构是在未变形的配置中显示的。

图:非线性固体力学系统的PINN体系结构。我们对1D示例((a)和(b))使用一个FNN,对2D示例((c)和(d))使用五个独立的FNN。我们考虑1D和2D示例的软约束和硬约束。

图:观测点抽样收敛性研究。我们考虑了四组观测点来研究采样点密度对参数预测精度的影响:(a)660个观测点;(b) 330个观测点;(c) 66个观测点;(d) 9个观测点。在(e)和(f)中,误差随着观测点数量的增加而减小。

图:时间序列采样。我们考虑三种时间序列采样策略。

图:观测点分布。

图:二维弹性静态示例的边界约束。

图:二维悬臂梁参数估计和梁位移。
文四:

基于物理的深度学习的本构模型表征和发现
摘要:
本构模型是建模物理过程的基本块,它们将守恒定律与系统的运动学联系起来。它们通常以线性或非线性常微分方程组(ODEs)的形式表示。然而,在非线性状态下,表征这些本构模型往往具有挑战性。对于固体和岩土材料,使用高度非线性的约束常微分方程来描述与宏观应力和应变量相关的本构关系,以表征其在可逆和不可逆变形过程的不同阶段的机械响应。本构建模的最新趋势是利用复杂的神经网络架构来构建无模型材料模型,然而,这种复杂的网络效率低下,需要大量的训练数据。因此,我们认为基于理论的弹塑性参数模型仍然是最有效和最具预测性的。为了减轻这种模型的表征和发现这一具有挑战性的任务,我们提出了一种用于应力-应变本构建模的物理信息神经网络(PINN)公式。我们解决的主要障碍是在PINN损失函数中嵌入弹塑性理论的复杂不等式约束。这些约束对于找到屈服面和塑性流动的正确形式至关重要。我们还表明,新数据集的校准可以非常有效地执行,并且即使在发现的情况下也可以实现增强的性能。该框架需要一个用于表征的数据集。尽管我们只关注机械本构模型,但类似的类比可以用于表征任何物理过程的本构模型。
数据集链接: https://github.com/sciann/sciann-applications/tree/master/SciANN-onstitutiveModeling

图:(A) 演化屈服面示意图;(B)等效应力和应变坐标下不同加载阶段的示意图;(C)𝜋-平面上画的各向同性和运动硬化规则以及屈服面形状因子;

图:所提出的用于表征和发现本构模型的PINN塑性解算器。

图:基于Drucker–Prager模型直接模拟的无量纲数据。

图:在100个随机生成的数据集上重新训练参考网络后识别的每个参数的相对误差。重新训练的时间限制为1000个,大约需要1分钟才能完成。所有参数的相对误差保持非常低。
文五:

使用近场动力学微分算子的非局部物理深度学习框架
摘要:
最近推出的物理知情神经网络(PINN)框架将物理学纳入深度学习,为求解偏微分方程(PDE)和识别方程参数提供了一条很有前途的途径。然而,由于网络无法全局捕捉解决方案行为,现有PINN方法的性能可能在存在急剧梯度的情况下降低。我们假设,除了短程(局部)空间和时间变量外,还可以通过在网络的输入中引入长程(非局部)交互来弥补这一缺陷。在这一假设之后,我们使用周动态微分算子(PDDO)开发了一种非局部PINN方法,这是一种结合长程相互作用并去除控制方程中空间导数的数值方法。由于PDDO函数可以很容易地融入神经网络架构,因此非局部性不会降低现代深度学习算法的性能。我们将非局部PDDO-PINN应用于固体力学中材料参数的求解和识别,特别是应用于受到刚性冲头压痕的区域中的弹塑性变形,其中混合位移-牵引边界条件导致求解中的局部变形和急剧梯度。我们记录了非局部PINN在求解精度和参数推断方面相对于局部PINN的优越行为,说明了其在模拟和发现解具有陡峭梯度的偏微分方程方面的潜力。

图:本地PINN架构。

图:交互域。

图:函数f(x)近似的非局部PDDO-PINN网络结构。

图:纯线性弹性变形情况下位移、应变和应力分量的有限元参考解。

图:在纯线性弹性变形的情况下,局部PINN预测与位移、应变和应力分量的真实数据之间的差异。

图:不同PINN框架的收敛行为作为(左)时期和(右)训练时间的函数。


