工业机器人的构成和分类,终于搞明白了。。。

01
工业机器人构成
工业机器人主要由主体、驱动系统和控制系统三个基本部分组成。
主体 - 即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3-6个运动自由度,其中腕部通常有1-3个运动自由度;
驱动系统 - 包括动力装置和传动机构,核心为减速器以及伺服电机,用以使执行机构产生相应的动作;
控制系统 - 是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。

工业机器人拆解图
02
工业机器人分类
关于工业机器人的分类,国际上没有指定统一的标准,可按负载重量、控制方式、自由度、结构、应用领域等划分。
按照结构形态分类如下:
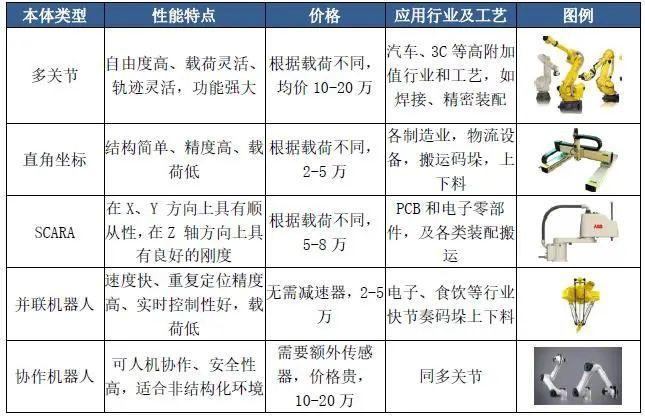
按照应用分类如下:

03
工业机器人产业链
工业机器人产业链主要是由机器人零部件生产企业、机器人本体生产企业、代理商、系统集成商、最终用户构成。本体是机器人产业链的核心,通常,本体企业设计本体、编写软件,采购通过代理商销售给系统集成商,系统集成商直接面向终端客户。有的本体企业和代理商也会兼做系统集成商。

从地区来看,欧洲、日本牢牢占据着工业机器人天下,日本、德国的工业机器人水平 世界 领先,这主要因为他们具备先发优势和技术沉淀。日本在工业机器人关键零部件(减速机、伺服电机等)的研发方面具备较强的技术壁垒。德国工业机器人在原材料、本体零部件和系统集成方面有一定优势。
从企业来看,ABB、发那科(FANUC)、库卡(KUKA)和安川电机(YASKAWA)这四家企业是工业机器人的四大家族,成为世界主要的工业机器人供货商,占据世界约 50% 的市场份额。
04
工业机器人工作原理
机器人的工作原理是一个比较复杂的问题。简单地说,机器人的原理就是模仿人的各种肢体动作、思维方式和控制决策能力。从控制的角度,机器人可以通过如下四种方式来达到这一目标。
“示教再现”方式:它通过“示教盒”或人“手把手”两种方式教机械手如何动作,控制器将示教过程记忆下来,然后机器人就按照记忆周而复始地重复示教动作,如喷涂机器人。
“可编程控制”方式:工作人员事先根据机器人的工作任务和运动轨迹编制控制程序,然后将控制程序输入给机器人的控制器,起动控制程序,机器人就按照程序所规定的动作一步一步地去完成,如果任务变更,只要修改或重新编写控制程序,非常灵活方便。大多数工业机器人都是按照前两种方式工作的。
“遥控”方式:由人用有线或无线遥控器控制机器人在人难以到达或危险的场所完成某项任务。如防暴排险机器人、军用机器人、在有核辐射和化学污染环境工作的机器人等。
“自主控制”方式:是机器人控制中最高级、最复杂的控制方式,它要求机器人在复杂的非结构化环境中具有识别环境和自主决策能力,也就是要具有人的某些智能行为。
以六轴垂直多关节机器人为例(如下图),通过机器人控制器及其控制系统,可实现S轴回旋,L轴下臂倾动,U轴上臂倾动,R轴手臂横摆,B轴手腕俯仰以及T轴的手腕回旋,实现六个轴的动作操作与配合。

如采用集中式控制系统,其控制原理将如下图所示:

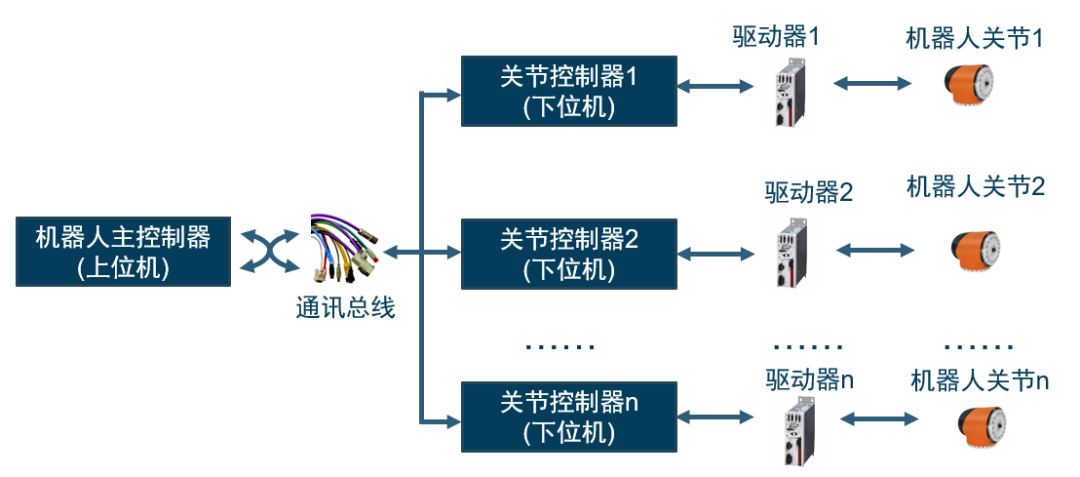
而如果采用分布式控制系统,其控制原理又将如下图所示:
05
工业机器人厂商面临的一些问题
随着工业制造业不断的产业升级,以及各种新技术的涌现,机器人制造商在生产过程中,也要考虑其终端用户的使用需求,例如一些工厂和产线的升级改造,机器人厂商也需要适应市场变化,做出相应调整。
-End-
免责声明:本文系网络转载或改编,仅供学习,交流所用,未找到原创作者,版权归原作者所有。如涉及版权,请联系删。
来源:非标机械专栏


