看了10本书终于明白非线性显式与隐式计算理论

1,有限单元法中的力学问题
力学问题可分为静力学与动力学问题。而动力学问题中又分为线性动力学问题与瞬态动力学问题,线性动力学基于模态分析。瞬态问题中简单的问题可以使用模态叠加法求解,复杂的非线性动力学问题往往需要使用直接积分法求解。直接积分方法有两类,一类是LS-dyna、Autodyn等常常使用的显式积分,另一类是Ansys等软件常用的隐式积分。

2,动力学问题
对于运动问题,初中生用脚趾头想想便写出了公式:F=ma,这便是最简单的刚体运动。如果需要考虑物体的内力等,便引出了动力学公式。
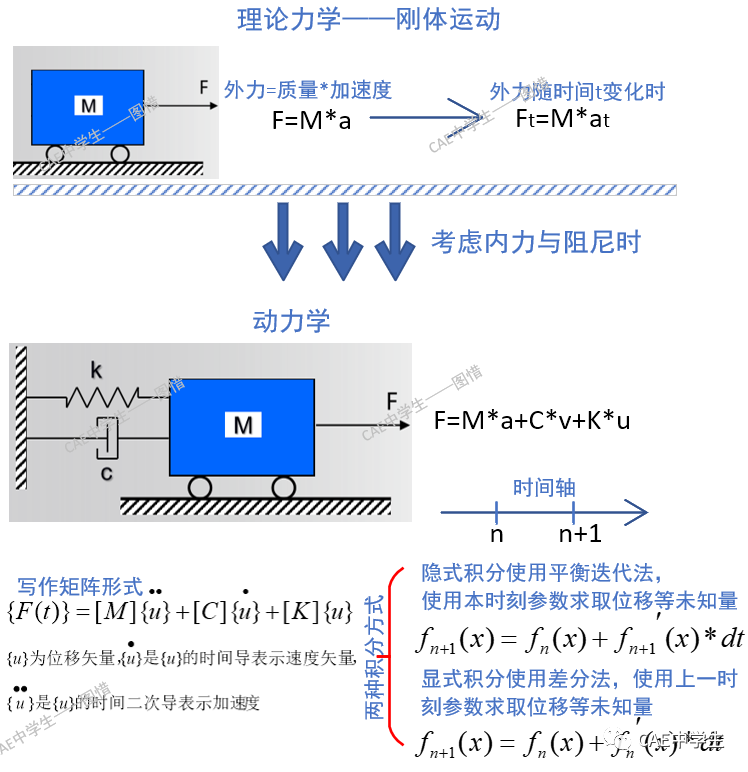
动力学往往是求位移、速度、加速度,隐式积分是使用本(n+1)时刻的参数求解未知量,显式积分是使用上一(n)时刻参数未知量,如上图。知道了这些就好比你知道了去北京要往北走,去三亚要往南走,但是你还是到不了终点,因为你只知道方向而不知道具体道路。那么就需要深入研究隐式计算与显式计算的流程与公式。
3,隐式计算与显式计算的区别
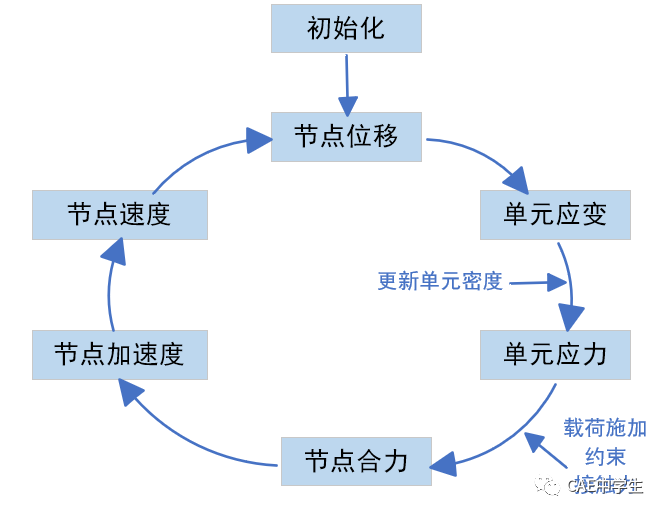
有限元求解的底层逻辑是先求解节点位移,再推导出单元应变和应力。
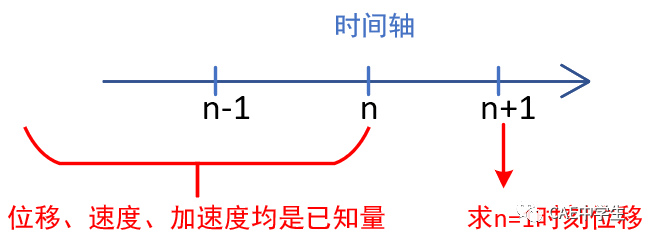
不管是对于隐式求解还是显式求解,当前求解步及其之前所有步的节点位移、速度、加速度都是已经被求解完成的已知量,而需要求的量便是下一时刻的节点位移量。
显式积分常用中心差分法,但是不是唯一方法。注意中心差分法不是有限差分法。为了简化,我们假设每一子步时间dt相同(实际软件计算中是变化步)。计算基本步骤如下图。

显式积分方法是在n时刻(即需要计算位移的上一时刻),建立动力学方程:

由上式可以反求n时刻加速度,实际上还有沙漏阻力、接触力矢量等,所以可以将改写为

假设n-0.5→n+0.5时间段节点以a(n)加速度着匀变速运动,那么列出n+0.5时刻的节点速度公式如下。


位移计算时,假设n→n+1时间内也着匀变速运动,注意这里不关心加速度,加速度也并不是a(n),否则节点从开始到最终都是做匀变速运动了,不符合非线性原则。此时间段节点的平均速度就是正中间n+0.5时刻的速度。

那么列出n+1时刻的节点位移公式:

由于n+1时刻的位移均有之前时刻的已知量求得,无需迭代,所以有些教材也写作函数形式:

注意求位移与求速度时所使用的插值不是同一条直线,求v(n+0.5)使用的n-0.5→n+0.5时间段插值线段,斜率为a(n);求u(n+1)使用n→n+1时间段插值线段,初始位移值u(n),平均速度v(n+0.5)。画成几个完整时间步示意图如下。

完整计算循环如下图。
以Newmark(增量迭代)方法为例。隐式积分在n+1时刻(即需要求解位移的本时刻),建立动力学方程:

其中加速度a(n+1)与速度v(n+1)通过以下方程表示



由以上公式可知,隐式求解需要转置刚度矩阵[K],对于线性问题,[K]为常数,无条件稳定。对于非线性问题,通过牛顿拉夫逊(Newton—raphson)方法进行一系列逼近来获取。对于复杂模型,刚度的转置过程消耗内存与时间较多。
4,通过图形法深入理解隐式与显式积分区别
显式积分无需检查收敛性,每一时间步开始的值由上一时刻确定,每一时间步求解一次线段斜率。

隐式积分也是在每一时间步开始时刻获得方程的切线斜率,但是每一迭代步都需要检查收敛容差。
如下图,以只设置1个子步为例,在牛顿拉夫逊方法中,第一次迭代,施加总载荷Fa。得到位移结果x1。根据位移,算出内力F1 。如果|Fa-F1|>容差值[R],系统不平衡。因此,根据当前的条件,计算新的刚度矩阵(虚线的斜率)。直到|Fa-F1|≤[R]。在下图例子之中,四次迭代之后,系统达到平衡,求解收敛。

由于显式积分无收敛性检查,即不需要平衡迭代,但是为了计算的稳定性和准确性,时间步长必须小于应力波(声波)在单元中的传播时间,即显式求解的准确度严重依赖于时间步长,时间步长又严重依赖单元尺寸与声速。
隐式积分对线性问题是无条件稳定的,甚至允许只设置一个时间步。隐式积分对非线性问题只要保证收敛的情况下,无论设置多长的时间步,结果都是稳定准确的;由于每一步都需要进行一次或多次平衡迭代,所以需要使用较小的时间步长保证收敛。但是总体来说,隐式计算的时间步通常比显式积分时间步大几个数量级。
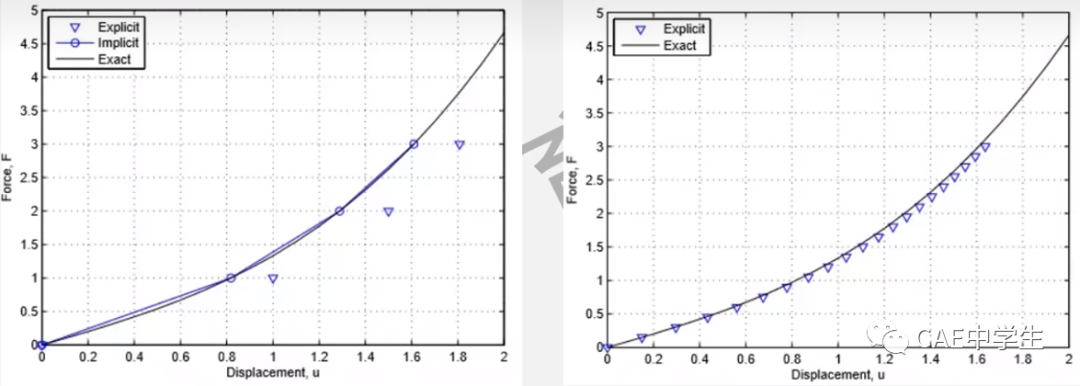
如下示意图,非线性问题中,隐式求解使用较大的时间步也能保证结果稳定(准确)。而显式求解使用较大时间步后导致计算结果偏移较大,而减小子步时间后,结果准确度提高。
所以显式算法常用于毫秒级的问题,如爆炸、碰撞等,当然也能用于成型等准静态问题,而隐式算法常用于秒级以上的静态或准静态问题。
显式问题往往需要更高频率的CPU以保证计算效率,而对内存要求不高,而隐式算法中由于需要对刚度求逆并进行平衡迭代,需要消耗很多时间,往往需要较大的内存,对CPU的要求反而没那么高。
部分参考资料
《Ansys Workbench有限元分析实例详解(动力学)》——周炬等
[2]《Ansys Workbench结构分析理论详解与高级应用》——尚晓江等
[3]《TrueGrid和LS-DYNA动力学数值计算详解》——辛春亮等
[4]《LS-DYNA基础入门教程》视频——水哥
[5]《ANSYS_WB_LS-DYNA - Explicit Dynamics Basics》——培训手册内容


