异步电机直接转矩控制DTC若干关键问题的研究--传统DTC(两电平六扇区)

导读:本期文章主要介绍异步电机直接转矩控制DTC。相比较于矢量控制,直接转矩控制控制复杂度降低且对电机参数的依赖性下降。
0、引言
不同于矢量控制技术,DTC利用Bang-Bang控制(滞环控制)产生PWM信号,对逆变器的开关状态进行最佳控制,从而获得转矩的高动态性能。DTC具有自己的特点,它在很大程度上解决了矢量控制中存在的一些问题,如计算的复杂特性,易受电动机参数变化的影响, 实际性能难以达到理论分析结果等。DTC摒弃了传统矢量控制中的解耦思想,而是将转子磁通定向更换为定子磁通定向,取消了旋转坐标变换,减弱了系统对电机参数的依赖性,通过实时检测电机定子电压和电流,计算转矩和磁链的幅值,并分别与转矩和磁链的给定值比较,利用所得差值来控制定子磁链的幅值及该矢量相对于磁链的夹角,由转矩和磁链调节器直接输出所需的空间电压矢量,从而达到磁链和转矩直接控制的目的。
一、直接转矩控制(两电平六扇区)

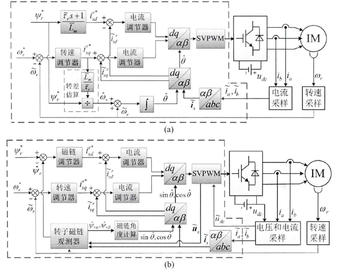
图1-1 异步电机直接转矩控制框图
在电动机实际运行中,保持定子磁链幅值为额定值,以便充分利用电动机铁心;转子磁链幅值由负载决定。通过控制定子磁链与转子磁链之间的夹角即转矩角可以控制电动机的转矩。在直接转矩控制中,其基本控制方法就是通过选择电压空间矢量来控制定子磁链的旋转速度,控制定子磁链走走停停,以改变定子磁链的平均旋转速度的大小,从而改变转矩角的大小,以达到控制电动机转矩的目的。
直接转矩控制采用两个滞环比较控制器,分别比较定子给定磁链和实际磁链、 给定转矩和实际转矩的差值,然后,根据这两个差值查询逆变器电压矢量开关表得到需要加在异步电动机上的恰当的电压开关矢量,最后通过PWM逆变 器来实现对异步电动机的控制。整个控制框图如图(1-1)所示。
下面的内容为付费内容,购买后解锁。
内容简介:DTC详细的原理和在MATLAB中实现的过程
著作权归作者所有,欢迎分享,未经许可,不得转载
首次发布时间:2023-11-08
最近编辑:11月前

硕士
签名征集中

还没有评论
相关推荐
最新文章
热门文章
