异步电机矢量控制FOC若干关键问题的研究----几种磁场定向方式的介绍
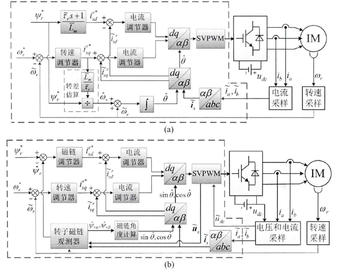
导读:接下的几期文章重点介绍异步电机矢量控制实现的几个关键问题的研究。本期文章重点介绍矢量控制FOC的原理和磁场定向的几种方式(按转子磁场定向、按定子磁场定向和按气隙磁场定向),下载资源中有文章中对应的仿真模型。一、矢量控制技术概述1968年Hasse提出了间接磁场定向控制的思路,1971年Blaschke提出了直接转子磁场定向的矢量控制方法。在转子磁链恒定的情况下,该磁场定向方法可以实现励磁和转矩的解耦控制,使得异步电机调速系统具有了可以比拟直流电机调速系统的动态性能。早期,异步电机由于相互耦合的特性,其变频调速系统动态性能不佳。随着磁场定向控制技术的出现,异步电机变频调速系统获得了长足的发展。之后随着高性能全控型器件如IGBT的广泛应用,才奠定了异步电机调速系统在变频调速领域的主导地位。考虑到转子磁链观测器参数误差影响大的情况,Blaschke在1974年提出了基于可以直接测量的气隙磁场定向的矢量控制方法。但是在旋转的气隙磁场坐标系下,磁场和转矩控制不能完全解耦,需要在控制中增加解耦项。而且气隙磁场采样电路的引入,会额外增加系统成本,降低可靠性。如果不考虑磁场直接采样,在传统的电压模型磁链观测器中,定子磁链估算相对于转子磁链估算,受电机参数敏感性影响较小。与气隙磁场定向相同,定子磁场定向下,系统要实现解耦控制,需要额外增加解耦项。在转子磁场定向系统下,系统输入输出之间的线性关系是建立在转子磁链幅值不变的前提上的。该方法需要应用准确的转矩和转子电阻参数。但实际应用中,这些参数是随着电机工作频率、温度等变化而变化,较难保证参数没有偏差。为了提高解耦控制的效果,降低其受电机参数偏差的影响,很多文章对于反馈形式进行了升级和改进。增加解耦项来实现解耦是目前提高矢量控制动态响应的一个主要方向。磁场定向控制系统根据估算定向角度方式的不同可以分为直接磁场定向和间接磁场定向两类。在间接磁场定向系统中,磁场定向的角度通过定子角频率积分获得。在有速度传感器的系统中,转子速度直接采样获得,此时只需要估算转差,就可以估算得到同步旋转角。标准形式的间接磁场定向矢量控制框图如图(1-1)(a)所示,其中转差估算基于参考信号。间接磁场定向矢量控制具有结构简单,计算量小的优点。但这种方法下的电机驱动系统的参数敏感性较高,尤其转子时间常数误差对系统的性能影响较大。相应的,在直接磁场定向系统中,需要增加观测器,直接观测磁链幅值和角度,其控制框图如图(1-1)(b)所示。在直接磁场定向系统中,可以选择多种形式的观测器,提高系统性能,降低参数敏感性。图1-1异步电机转子磁场定向矢量控制框图:(a)间接磁场定向;(b)直接磁场定向
有附件