原创|干货|长文|264亿件包裹怎么破?闪电式自动化分拣技术 细节大起底!

大家好,我是你们的老朋友,智能仓储物流技术研习社,社长,老K。上周给大家分享了仓储物流中心中的“拆零拣选”的章法和具体方案,这次老K带大家一起来进入下一个环节:自动化分拣。
由于整理本篇文内耗费老K约2周的时间,耗死脑细胞大约20亿,看到本篇的朋友如果觉得对您有帮助,请您举起您的纤纤玉手,帮忙给将本篇文章在您的朋友圈分享出去。谢谢大家!
在分享技术干货之前,老K和朋友们分享如下一组数据:
根据国家邮政局最新公布的邮政行业运行情况,1-5月份,全国快递服务企业业务量累计完成264.1亿件,同比增长18.4%。
2019年,全国重点地区快递服务全程时限为56.2小时,较2018年缩短0.64小时,72小时准时率为79.26%,较2018年提高0.29个百分点。

你老婆每天不停买买买的大批量包裹就混���这么海量的包裹堆里,究竟是用什么办法在满足期待(疯狂等待)的足够短的时间内找到这个包裹并微笑敲开你家门铃的呢?今天老K就来带大家解密一下这背后神奇又先进技术的秘密:自动化分拣系统。
###包裹分拣###
所有包裹从分拣中心出来,要去往各处不同的目的地。因此快速将包裹送到你手里的第一步,就是在分拣中心内,按照包裹目的地,采用先进技术装备对海量包裹进行超高效的分类处理(使过程耗时压缩到极致),这个过程即为包裹分拣。
为了不与上篇介绍的自动化拣选技术混淆,在谈自动化分拣之前,先强调一下,“分拣”和“拣选”不是一回事。
“分拣”的重点在于“分”,英文名称是:sorting。生活中,垃圾分类是分拣。

“拣选”的重点在于“拣”,英文名称是:picking。生活中,去菜市场买菜是拣选。

最集中的分拣环节在仓储物流中心里通常发生在拣选之后。通常的拣选是为了履行下游或者客户的订单,在订单量较大、拣选并行作业、上游物理位置分散的情况下,通常需要对拣选后混杂的订单单元进行分拣才能进行后续的下游作业。
比如在商超物流中心中,经过多重复杂的拣选作业后,需要将拆零拣选后的订单按照门店进行分拣,以便送货车辆将所负责配送的门店的所有订单快速转运离开物流中心。
物流中心中的拆零拣选的物料流向大概如下:

代表性的场景如下:

物流中心中的分拣作业的物料流向大概如下:
代表性的场景如下:

事实上,由于现代商业模式的发展,订单越来越碎片化,整件出库的概率越来越小,零散的订单势必最终要被分散到达最终的客户收里。
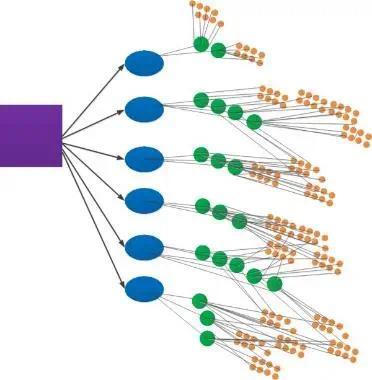
对于仓储物流中心而言,由于自身所处的供应链环节的位置不同,可能分拣的业务量有所不同,但是从总体的物流链或者供应链的业务结构来看,大部分都是顺序逐次层级发散性的由集中到分散的过程,因此或多或少都会有分拣的工作在本仓储物流内部发生。
其实,不论在生产工厂内部还是物流中心里,需要分拣的作业在很多环节都牵涉到。
比如收到退货后在入库前需要进行按类分拣;收到混SKU的上游供应商货物时也需要提前分拣再入库;在拣选过程中,由于存在大量按区域分拣、按类别分拣的情况,因此系统需要对料箱进行分类或者分层进行分拣后再供应到合适的拣选区域内;在发货前,由于订单大小不同,需要的包装箱也不同,为合理使用包装箱,也需要分拣机对不同的包装箱分拣后再到正确的打包台。
在上游货物到达分拣环节时,如果物料量不大,且分拣的目标分类不多时,可以由人工简单的进行分拣。比如疫情期间,在你家门口的快递小哥们,将快递的收货人所在楼单元号以此分拣号,以便收货人能快速的找到自己的快递。

如果本分拣环节的物料量非常大,且种类繁多,同时分拣的目标分类又很多时,人工作业则显得力不重新,且很容易产生疲劳:
1.分辨物料的属性,该分拣到哪各目标位;
2.规划好目标位和占地范围,由于还未开始分拣,对各种目标位的占比有多大,并不知道,
因此往往会有偏差;
3.把物料搬到各自目标位,大量行走过程容易产生疲劳;
4.由于物料量大,需要人海战术,不易管理,过程混乱;
因此,人工可能要面对的待分拣的物料是这样:

或者是这样

这样繁杂的流程和感觉无边无际的任务让人容易暴走,产生“暴力分拣”。

分拣的工作是快递行业的重头,日益增长的快递业务量和招人难等问题,促使越来越多的电商物流和快递公司加快实施物流系统的自动化升级。
其实,早在第二次世界大战后,在美国、日本和欧洲,由于物料和业务量的猛增,纯人工的分拣已无法胜任,自动化分拣技术就在物流配送中心广泛采用了。
在我国,随着社会的进步和发展,自动化分拣设备被广泛的应用于医药、烟草、流通、食品、汽车等行业,但特别是对于电商和快递行业来说,随着热度与发展速度的提升以及人工红利的消失,使得自动化输送分拣装备近些年来呈现爆炸式增长。
采用自动化的方式代替人去做物料分拣,首先要解决人工分拣的这些问题,用自动化的手段来代替人工。
1:分辨物料:
分��物料的目的主要是为了设备在对物料分拣时有依据。要分辨,首先要给物料的身份贴标签。当然,最常用的身份标签是条码。

每个条码背后都代表着一定的意义,可以是目的地编码、批次编号、客户编码等等,根据一定的原则,系统告诉设备后续将这个包裹分拣到哪个目的地。
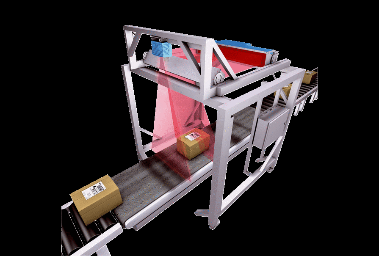
如果分拣环节在物流中心中靠近发货环节,则往往需要对物料进行更多信息的采集作为辅助管理和相应措施采集。因此采用DWS动态称重扫描测体积一体机在分辨物料过程中一次性完成。
DWS可实现实测的重量数据实时快速上传至系统与其理论重量进行比对,如发现重量有异,或相差较大,说明该包裹里面装的产品有可能是少装、多装或错装。此时 检测设备会自动停机报警或自动将该包裹剔除。从而实现不合格包裹不出库。极大的提高分拣效率,减少出错率。
2:目标位
物以类聚,被分拣的物料要匹配各自合适的下游来将分拣系统处理后的各类物料进行收集,运输,打包等操作。
输送机类:
分拣后的物料进入下游的输送机执行后续的工艺搬运

收集缓存:
无动力积放式

有落袋式

有长积放式

有多级订单缓存式的

3:物料的搬运
采用自动化分拣机的初衷就是为了解决效率低的问题,因此物料在自动化分拣系统中的移动一定要满足高吞吐量的要求。而连续式搬运自然是不二的选择。因此遍历市面上的各种分拣系统,绝大大数高吞吐量的分拣方案都采用的基于输送机类的连续式输送。
可以参考老K之前的文章:

4,物料和分拣过程的管理
从物料的第一步“分辨”物料开始,自动分拣系统通过软件和运行逻辑关系就可以时刻跟踪每个物料单元在分拣系统全过程。系统可以掌控所有分拣的物料信息,作业流信息,异常情况,订单汇总,硬件动作控制等等全方位的管理。

5,分拣机构
进入分拣系统后,物料运行到该去的目标位时,控制系统会发送指令给当前位置的执行机构,将该物料送入到对应的下游的目标位输送机或者缓存中。
移栽式

偏转轮式

扫臂式
滑靴式
侧向翻转
推盘式
横向皮带式

下漏式
以上每种分拣机构都有各自的特点和针对的应用场景,此处不做过多介绍,大家可以从很多来源找到这些内容。
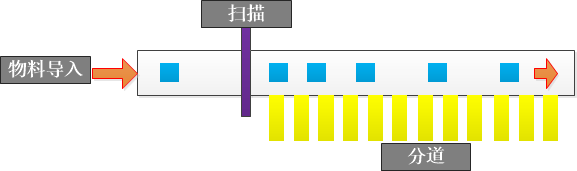
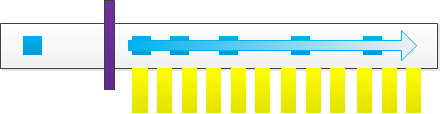
在有些应用场景下,如果将物料分拣后只有10~50个分类(目标位),则可以利用如上图所示的直线分拣线来实现分拣。直线分拣占地面积小,整体以长条形主线再加上多个短线支路的形式呈现。通常为物料经导入输送机并经过信息扫描机构后直接到达分拣机构设置段。直线自动化分拣线结构紧凑,由于没有循环功能,因此需要分拣的所有物料必须在分拣结构之前统一导入系统,因此在物料导入之前通常是多路上游物料的合并。
分拣系统的效率可以从单位时间内导入的物料数量来判断,而物料的导入效率是由下游的分拣速度决定的,分拣速度与主线速度成正比,也与物料之间的间距成反比。两个物料之间的间距的最小的理想距离为前一个物料在被分拣机构处理周期内,后一个物料刚刚抵达分拣机构处。

因此物料的导入时的间距要与主线的速度还有分拣机构的处理周期相匹配。
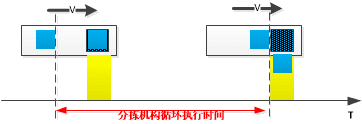
两个物料之间的间距L因此需要再导入分拣线之前就要控制好,比如速度差拉距,精确的启停控制。

其中对于交叉带分拣机要控制的导入时机是正好落入等间距的小车内
对于滑靴式的,由于分拣机构和连续和颗粒性的,则间距会更加灵活。

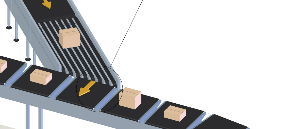
上文提到的各种分拣机构都可以被应用到直线形分拣系统中。如下图所示:


值得一提的是,多数直线分拣机上的一个分拣机构故障或者停止时,会使整个分拣线上的物料停止,冗余性较差。
另外由于直线分拣机上在分拣过程中,随着物料的分拣过程,越往直线的后端走,剩余未分拣的物料越少,后端的分拣机构的资源利用率越低,因此效率上注定不会到太高的极限。
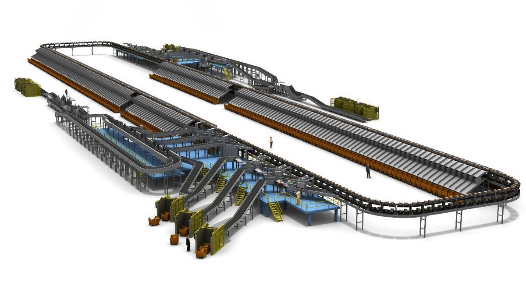
如果要分拣的物料的目标位众多,分拣的效率要求非常高,则可以考虑采用循环式的自动化分拣选。典型的循环式自动化分拣选是交叉带分拣机和翻板式分拣机。循环式分拣机相比较直线时分拣机,主线移动速度快,可达2米/s,而分拣机构又独立于主线单独运行,某个分拣机构故障后,并不影响主路上的其他物料的分拣。
由于分拣的主线是循环式的,物料的导入设置和分拣口的位置设置可以更加灵活,可以根据需要在不同的位置分散设置机多个物料导入设置以达到更高的分拣机构利用率和分拣效率。
同时由于结构的特点,循环式分拣系统还可以灵活的布局,包括主线做成斜坡式的上升和下降,当然也包括拐弯。
通常循环式分拣机的成本较高,采用循环式分拣机的原因主要是由于其超高的分拣效率,可以达到2万件每小时。一方面是主线速度快,同时分拣机构可以独立并发时分拣,另外可以将物料的导入位置分散设置,充分利用分拣资源。
直线分拣系统中由于“一条道跑到黑”,路线上不是回路,因此要分拣的物料必须在拣选目标位之前就得导入到分拣线中,因此无法半路插入分支导入线路。
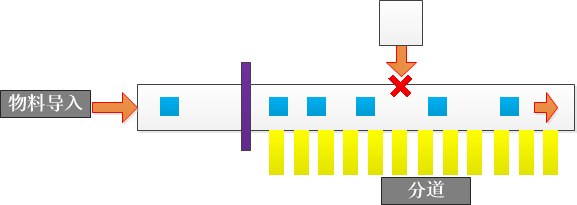
而在分拣线上如果能插入分支导入线路是很有益的,而循环式的分拣线提供了这样的条件。
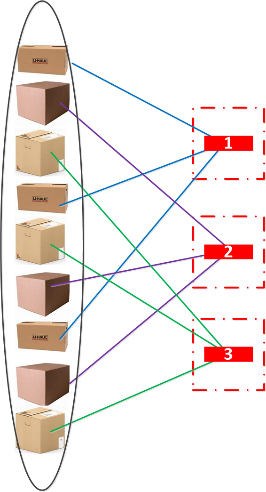
我们来详细说一下这个事情。假设一个环形分拣线如下所示:
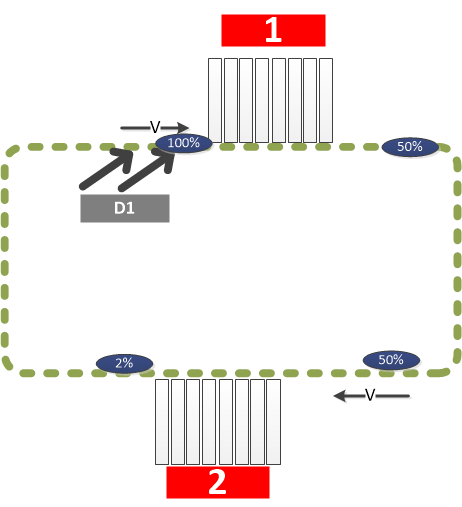
有D1处导入要分拣的物料,物料沿着循环分拣路径进行分拣。假设分拣的物料在每个目标位被分拣的概率都相同,则物料经由“1”分拣端后,到达“2”时,物料已经被分拣掉了一半。而分拣系统本身的能力在“2”处并没有打折扣,也就是相当于越往后走,拣选资源约被闲置,没有被充分利用。这同样也是上文直线分拣机遇到的问题。不过由于循环拣选线是闭环的,我们可以在“2”处再布置物料导入机构,这样可以使物料在主线上再次“满血复活”,充分利用拣选机的分拣能力。
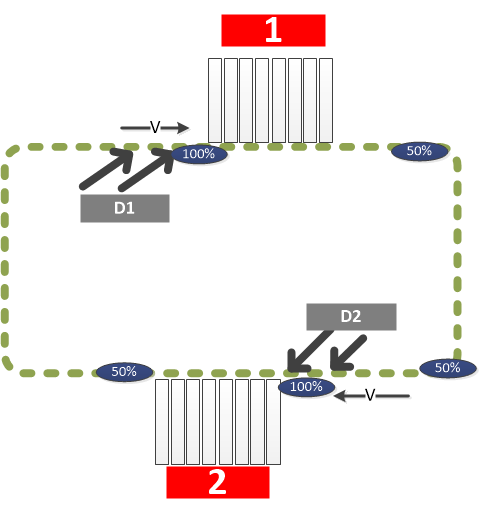
同样的时间内,导入的物料增多了,并且能被系统逐渐消化,系统的拣选效率自然会提高。
事实上,现实中对于分拣效率的要求是越来越高的,甚至是疯狂的程度,最典型的是由于电商的一些促销活动引发的包裹的突然猛增而引发的对分拣的超高效的要求。
比如在18年的双十一期间,各主要电商企业产生的快递订单量高达13.52亿件,而快递企业共处理了包裹4.16亿件,创下史上新高。而中国的物流配送也已经从以天为单位向着小时和分钟为单位迈进。
为此,相关的工程师和专家想出各种提升分拣效率的高招,比如:
上下双层分拣机同时分拣,效率直接翻倍

并排双列分拣机,效率直接翻倍

甚至多排多层的,效率倍上加倍。
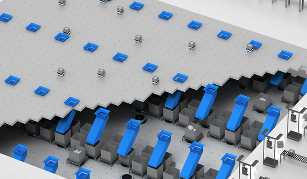
大家可能也注意到,上边提到的所有的循环回路都是在一个水平面实现的,带来的问题是占地面积会非常大。那如果能垂直循环的话,则可以充分利用高度空间,既能节省占地面积,又能实现循环的高速分拣。而不论是交叉带分拣机还是翻板式分拣机的先天性设计特点,小车或者翻板垂直往下循环式,物料无法待在小车或者翻板上,如下图:

而如要实现这样的功能,就需要创新设计新的结构。而这难不住我们国家的专家和优秀的工程师,垂直直线型循环高速分拣机被研发出来:

工作起来如下:
这样的设计,既有直线型的占地面积小的优点,又同时能充分利用循环式分拣的超高效率和柔性,分拣可以同时在上下两个层面上进行分拣、导入物料,最大化的利用空间的同时也最大化��利用了所有分拣机构的性能和资源。
上文也提到过,在分拣的过程中,最难解决的是超高分拣效率的要求,另外一个是超多分拣目标位的问题,这种情况在电商和快递行业尤其明显。
以2019年的韵达公司为例,韵达快递在全国有2.61万个服务网点,同时在全国内有约65个转运中心,平均下来,每个转运中心需要分拣的目标位为401个。

由于要满足快递业务高效的要求,只能采用循环式交叉带分拣机,对于交叉带分拣机要设置401个目的地的格口,意味着交叉带分拣机的主线要覆盖到401个目的地隔口,这意味着很大的资金投资。因此实际中往往需要采取折中的一些办法,比如按照大片去分拣后再逐级分拣而不采用一次性所有目标位直接分拣完。而分级是属于投资和效率折中的办法。这种方式在处理退货过程中也经常使用。
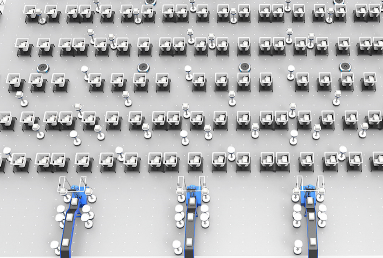
而随着类Kiva机器人在电商行业的大规模的应用,基于Kiva机器人类似的移动机器人在分拣领域中为解决多目的地方面做出了有益的尝试。

由于增加一个分拣隔口,对于交叉带而言就至少要加一段小车,因此交叉带的投资会随着分拣格口数量线性增加。


而采用类Kiva机器人,由于搬运机器人是离散性搬运系统,隔口与搬运机器人是分离的,搬运机器人的投资和分拣格口是什么关系呢?
假设给定的分拣中心的长为L,宽为L的n倍,则分拣中心的面积为:
S=n*L*L
由于搬运机器人可以柔性搬运,因此格口可以灵活的分布在场地内的任何位置,分拣中心越大,可以安置的目的格口数量越多,我们可以大致认为格口数量与面积大小成正比:
G=p*S=p*n*L*L,其中p为常数
搬运机器人在分拣过程中要做的工作主要为从物料起点取件,运行到目标格口出,将物料快速投出。常见的类Kiva机器人是沿着地面二维码运行的,路径是有X和Y轴方向运行的总合计,则分拣一个包裹的平均循环路径为:
A=c*(L+n*L)=c*(n+1)*L,
其中c为常数,为机器人运行的平均路径长度系数。
则可以推出,一个搬运机器人分拣一个包裹的周期时间:
T=A/v
其中v为机器人运行的平均速度,约为常数。
如分拣中心配置有m台搬运机器人,则可以推算出整体的分拣效率(以小时计)为:
E=m*3600/T=3600*m*v/[c*(n+1)*L]
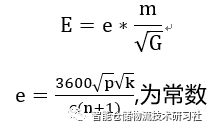
由公式我们可以大概得知,很显然配置的搬运机器人数量越多,分拣效率越高。分拣效率维持不变的前提下,格口数量设置越多,需要投入的搬运机器人数量越多,但是是与格口数的平方根成正比的:

这说明,随着格口数的增大,需要机器人的数量并非是线性增加的,这就使搬运机器人有可能胜任应付大规模隔口但是机器数量投资不巨大的场景。
而对于搬运机器人要攻克的首要难题是怎么提高自身的拣选吞吐率。
对于离散式搬运,提高搬运效率可以从多个角度入手:
一方面可以提高自身机构运行的物理速度,比如现在有的分拣机器人空载速度能达到2.5m/s

一方面可以增加搬运机器人的单次搬运量

另外一方面采用集团军作战,以价格低廉但数量庞大取胜

采用类Kiva搬运机器人进行分拣时的流程与上文中提及的连续式的分拣系统类似,也要经过包裹的扫描,运输,然后到目的位分拣。

类kiva机器人的分��机构主要是翻板和横向皮带为主,常见的有运行在钢平台或者将机器人分拣面做高直接落袋式两种方式进行分拣。

分拣环节在生产工厂和仓储物流中心中都有非常重要的地位,它向上承接着出库和拣选任务,向下链接着集货、打包和发货,因此在自动化分拣系统往往要充分考虑与上下游系统的适配,一面资源过程或者投入不足。
而自动化分拣技术其实一直都存在于仓储物流系统中的各个环节,从简单的1分2的分流,再到全自动机械手的拆码盘,这些都是应用很多年的传统低中速的分拣方案。

而由于在我国电商行业和快递行业的迅猛发展,使我们国家的分拣需求猛增。由于我国的超大的网购快递的用户市场,使自动化分拣也有了更大、更严格、跟高效考验的应用场景,因此我们国家的自动化分拣系统也越来越先进,甚至某种程度上领先全球。因此,高效、精准的邮快件处理背后,是先进技术装备的支持。
比如,百世快递在2019年实备;现全智能分拣,自动化设备数量同比2018年增加55%;圆通快递仅在2019年上半年就新增一倍数量的自动化设中通则陆续将全国各地单层自动分拣线升级为双层;顺丰控股约60个中转场使用全自动分拣系统。
由于需求场���的不断变化和业务的不断扩大,国内的分拣系统相关的各个子环节也逐步的不断有创新性的产品和系统涌现出来,比如类Kiva拣选机器人的投入运行,比如配备视觉的全自动机械手的物料导入方案代替人上工包


再比如各种高精度告诉的动态称重、尺寸检测扫描系统DWS等等的研发和应用,呈现出百花齐放,不断创新的良好态势。
本文虽然介绍了目前主流的大部分的分拣系统,但是在实际应用过程中还是要结合实际的场景来选择正确的拣选系统以匹配好现有的业务内容。比如要综合考虑要分拣的物料的物理属性,包括尺寸、重量,外形,包装形式、是否易碎等等,同时也要考虑业务峰值时的最大拣选吞吐量,当然也综合考虑物料分拣后的目标位数量配置和具体的分拣模式,以达到最佳的资源利用和最合理的投资。
如果您已经看到了这里,别忘了帮忙给将本篇文章在您的朋友圈分享出去。老K在这里替我逝去的20亿脑细胞先谢谢大家。


