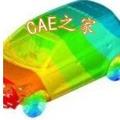
LS-DYNA精编教材
1.1 LS-DYNA 简介
LS-DYNA 是世界上最著名的通用显式动力分析程序,能够模拟真实世界的各种复杂问题,特别适合求解各种二维、三维非线性结构的高速碰撞、爆炸和金属成型等非线性动力冲击问题,同时可以求解传热、流体及流固耦合问题。在工程应用领域被广泛认可为最佳的分析软件包。与实验的无数次对比证实了其计算的可靠性。
由J.O.Hallquist主持开发完成的DYNA程序系列被公认为是显式有限元程序的鼻祖和理论先导,是目前所有显式求解程序(包括显式板成型程序)的基础代码。1988年J.O.Hallquist创建LSTC公司,推出LS-DYNA程序系列,并于1997年将LS-DYNA2D、LS-DYNA3D、LS-TOPAZ2D、LS-TOPAZ3D等程序合成一个软件包,称为LS-DYNA。LS-DYNA的最新版本是2004年8月推出的970版。
1.1.1 LS-DYNA功能特点
LS-DYNA程序是功能齐全的几何非线性(大位移、大转动和大应变)、材料非线性(140多种材料动态模型)和接触非线性(50多种)程序。它以Lagrange算法为主,兼有ALE和Euler算法;以显式求解为主,兼有隐式求解功能;以结构分析为主,兼有热分析、流体-结构耦合功能;以非线性动力分析为主,兼有静力分析功能(如动力分析前的预应力计算和薄板冲压成型后的回弹计算);军用和民用相结合的通用结构分析非线性有限元程序。LS-DYNA功能特点如下:
1.分析能力:
l非线性动力学分析
l多刚体动力学分析
l准静态分析(钣金成型等)
l热分析
l结构-热耦合分析
l流体分析:
²欧拉方式
²任意拉格郎日-欧拉(ALE)
²流体-结构相互作用
²不可压缩流体CFD分析
l有限元-多刚体动力学耦合分析 (MADYMO,CAL3D)
l水下冲击
l失效分析
l裂纹扩展分析
l实时声场分析
l设计优化
l隐式回弹
l多物理场耦合分析
l自适应网格重划
l并行处理(SMP和MPP)
2.材料模式库(140多种)
l金属
l塑料
l玻璃
l泡沫
l编制品
l橡胶(人造橡胶)
l蜂窝材料
l复合材料
l混凝土和土壤
l炸药
l推进剂
l粘性流体
l用户自定义材料
3.单元库
l体单元
l薄/厚壳单元
l梁单元
l焊接单元
l离散单元
l束和索单元
l安全带单元
l节点质量单元
lSPH单元
4.接触方式(50多种)
l柔体对柔体接触
l柔体对刚体接触
l刚体对刚体接触
l边-边接触
l侵蚀接触
l充气模型
l约束面
l刚墙面
l拉延筋
5.汽车行业的专门功能
l安全带
l滑环
l预紧器
l牵引器
l传感器
l加速计
l气囊
l混合III型假人模型
6.初始条件、载荷和约束功能
l初始速度、初应力、初应变、初始动量(模拟脉冲载荷);
l高能炸药起爆;
l节点载荷、压力载荷、体力载荷、热载荷、重力载荷;
l循环约束、对称约束(带失效)、无反射边界;
l给定节点运动(速度、加速度或位移)、节点约束;
l铆接、焊接(点焊、对焊、角焊);
l二个刚性体之间的连接-球形连接、旋转连接、柱形连接、平面连接、万向连接、平移连接;
l位移/转动之间的线性约束、壳单元边与固体单元之间的固连;
l带失效的节点固连。
7.自适应网格剖分功能
自动剖分网格技术通常用于薄板冲压变形模拟、薄壁结构受压屈曲、三维锻压问题等大变形情况,使弯曲变形严重的区域皱纹更加清晰准确。
对于三维锻压问题,LS-DYNA主要有两种方法:自适应网格剖分和任意拉格朗日-欧拉网格(ALE)网格进行Rezoning),三维自适应网格剖分采用的是四面体单元。
8 ALE和Euler列式
ALE列式和Euler列式可以克服单元严重畸变引起的数值计算困难,并实现流体-固体耦合的动态分析。在LS-DYNA程序中ALE和Euler列式有以下功能:
l多物质的Euler单元,可达20种材料;
l若干种Smoothing算法选项;
l一阶和二阶精度的输运算法;
l空白材料;
lEuler边界条件:滑动或附着条件;
l声学压力算法;
l与Lagrange列式的薄壳单元、实体单元和梁单元的自动耦合。
9.SPH算法
SPH(Smoothed Particle Hydrodynamics)光顺质点流体动力算法是一种无网格Lagrange算法,最早用于模拟天体物理问题,后来发现解决其它物理问题也是非常有用的工具,如连续体结构的解体、碎裂、固体的层裂、脆性断裂等。SPH算法可以解决许多常用算法解决不了的问题,是一种非常简单方便的解决动力学问题的研究方法。由于它是无网格的,它可以用于研究很大的不规则结构。
SPH算法适用于超高速碰撞、靶板贯穿等过程的计算模拟。
10.边界元法
LS-DYNA程序采用边界元法BEM(Boundary Element Method)求解流体绕刚体或变形体的稳态或瞬态流动,该算法限于非粘性和不可压缩的附着流动。
11.隐式求解
用于非线性结构静动力分析,包括结构固有频率和振型计算。LS-DYNA中可以交替使用隐式求解和显式求解,进行薄板冲压成型的回弹计算、结构动力分析之前施加预应力等。
12.热分析
LS-DYNA程序有二维和三维热分析模块,可以独立运算,也可以与结构分析耦合,可进行稳态热分析,也可进行瞬态热分析,用于非线性热传导、静电场分析和渗流计算。
热传导单元:8节点六面体单元(3D),4节点四边形单元(2D);
材料类型:各向同性、正交异性热传导材料,可以与温度相关,以及各向同性热传导材料的相变;
边界条件:给定热流flux边界,对流convection边界,辐射radiation边界,以及给定温度边界,它们可随时间变化;给定初始温度,可计算二个物体接触界面的热传导和热辐射,给定材料内部热生成(给定热源);
热分析采用隐式求解方法,过程控制有:
l稳态分析还是瞬态分析;
l线性问题还是非线性问题;
l时间积分法:Crank-Nicholson法(a=0.5)和向后差分法( a=1);
l求解器:直接法或迭代法;
l自动时步长控制。
13.不可压缩流场分析
LS-DYNA不可压缩流求解器是970版新增加的功能,用于模拟分析瞬态、不可压、粘性流体动力学现象。求解器中采用了超级计算机的算法结构,在确保有限元算法优点的同时计算性能得到大幅度提高,从而在广泛的流体力学领域具有很强的适用性。
14.多功能控制选项
l多种控制选项和用户子程序使得用户在定义和分析问题时有很大的灵活性。
l输入文件可分成多个子文件;
l用户自定义子程序;
l二维问题可以人工控制交互式或自动重分网格(REZONE);
l重启动;
l数据库输出控制;
l交互式实时图形显示;
l开关控制-可监视计算过程的状态;
l对32位计算机可进行双精度分析。
15.前后处理功能
LS-DYNA利用ANSYS、LS-INGRID、ETA/FEMB、TrueGrid、LS-POST和LS-PREPOST强大的前后处理模块,具有多种自动网格划分选择,并可与大多数的CAD/CAE软件集成并有接口。
后处理:结果的彩色等值线显示、梯度显示、矢量显示、等值面、粒子流迹显示、立体切片、透明及半透明显示;变形显示及各种动画显示;图形的PS、TIFF及HPGL格式输出与转换等。
16.支持的硬件平台
LS-DYNA 970版的SMP版本和MPP版本是同时发行的。MPP版本使一项任务可同时在多台分布计算机上进行计算,从而最大限度地利用已有计算设备,大幅度减少计算时间。计算效率随计算机数目增多而显著提高。
LS-DYNA 970版的SMP版本和MPP版本可以在PC机(NT、LINUX环境)、UNIX工作站、超级计算机上运行。
1.1.2 LS-DYNA应用领域
1 汽车工业
l碰撞分析
l气囊设计
l乘客被动安全
l部件加工
2 航空航天
l鸟撞
l叶片包容
l飞机结构冲击动力分析
l碰撞,坠毁
l冲击爆炸及动态载荷
l火箭级间分离模拟分析
l宇宙垃圾碰撞
l特种复合材料设计
3 制造业
l冲压
l锻造
l铸造
l切割,等
4 建筑业
l地震安全
l混凝土结构
l爆破拆除
l公路桥梁设计
5 国防
l内弹道和终点弹道;
l装甲和反装甲系统;
l穿甲弹与破甲弹设计;
l战斗部结构设计;
l冲击波传播;
l侵彻与开坑;
l空气,水与土壤中爆炸;
l核废料容器设计,等
6 电子领域
l跌落分析
l包装设计
l热分析
l电子封装
7 石油工业
l液体晃动
l完井射孔
l管道设计
l爆炸切割
l事故模拟
l海上平台设计
8 其它应用
l玻璃成型
l生物医学
l体育器材(高尔夫杆,高尔夫球,棒球杆,头盔)。
1.2 LS-DYNA的前后处理
LS-DYNA的前后处理非常多,例如ANSYS、PATRAN、ETA公司的FEMB、TrueGrid、INGRID、HYPERMESH,新开发的后处理为LS-POST和LS-PREPOST。另外,将LS-DYNA输出的文件进行格式转换后,AVS-EXPRESS也可以读入,它能够生成质量更高的效果图和动画。
应该针对不同的行业,不同的应用领域选择合适的前后处理。LS-PREPOST为后处理,介绍LS-DYNA软件的使用方法。
1.3 显式动力分析的特点
非线性问题:
l块质量矩阵需要简单转置。
l方程非耦合,可以直接求解(显式)。
l无须转置刚度矩阵,所有非线性(包括接触)都包含在内力矢量中。
l内力计算是主要的计算部分。
l无须收敛检查。
l保持稳定状态需要小的时间步。
1.4 单元
1.4.1 单元类型
LS-DYNA有7种单元类型:
lLINK160:桁架单元
lBEAM161:梁单元
lSHELL163:薄壳单元
lSOLID164:块单元
lCOMBI165:弹簧与阻尼单元
lMASS166:结构质量
lLINK167:缆单元
所有显式动力单元为三维的,每种单元可用于几乎所有材料模型,都有几种不同算法,均具有一个线性位移函数,目前尚没有具有二次位移函数的高阶单元。每种显式动力单元缺省为单点积分。
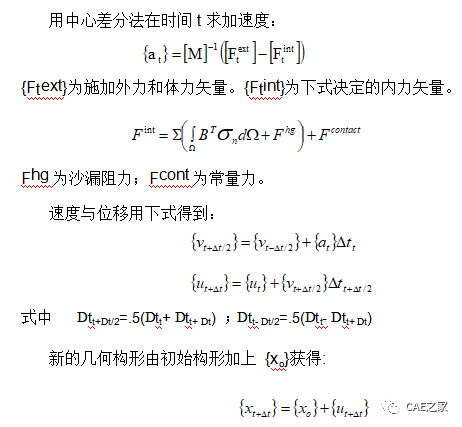
3.4.1.1LINK160单元
3D圆杆单元用来承受轴向载荷,用3个节点定义单元,第3个节点用来定义杆的初始方向,见图3.1。
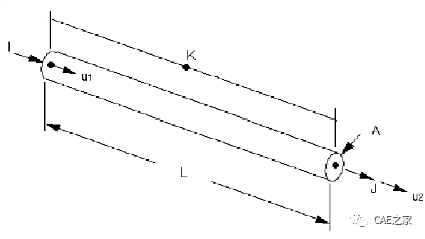
图3.1 LINK160单元
3.4.1.2BEAM161梁单元
由于不产生应变,此3D梁适用于刚体旋转,用3个节点定义此单元,见图3.2。
图 3.2 BEAM161 梁单元
可以定义几种标准梁截面,见图3.3。
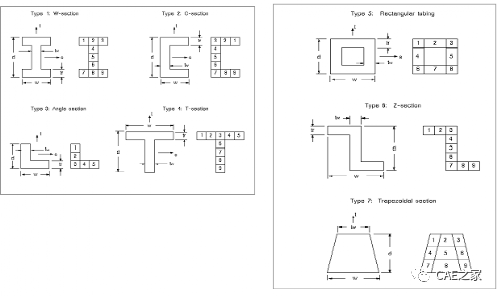
图3.3 几种标准梁截面
3.4.1.3 SHELL163 薄壳单元
Shell163有11种不同算法,最重要的几种有:
lBelytschko-Tsay(BT,KEYOPT(1)=2,default):
²简单壳单元;
²非常快;
²翘曲时易出错。
lBelytschko-Wong-Chiang(BWC,KEYOPT(1)=10):
²速度是BT单元的1.25倍;
²适用于翘曲分析;
²推荐使用。
lBelytschko-Leviathan(BL,KEYOPT(1)=8):
²CPU时耗为BT单元的1.4倍;
²第一个具有物理沙漏控制的单元。
lS/R co-rotational Hughes-Liu(S/R CHL,KEYOPT(1)=7):
²没有沙漏的壳单元;
²CPU为8.8 * BT。
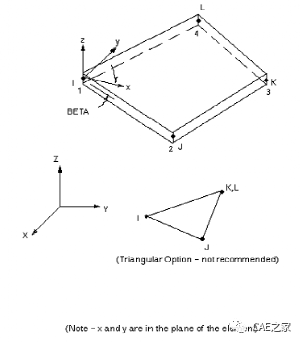
图3.4 SHELL163 薄壳单元
3.4.1.4SHELL163 膜单元算法
有两种膜单元算法:
lBelytschko-Tsay-Membrane(KEYOPT(1)=5):
具有单点积分的膜单元算法。
lFully integrated Belytschko-Tsay-Membrane(KEYOPT(1)=9):
具有4个积分点的膜单元算法。
3.4.1.5 SOLID164 8节点六面体单元
可以选择两种算法:
l单点积分;
²对大变形问题十分有效;
²需要沙漏控制;
l完全积分 (2x2x2 积分);
²求解慢,但无沙漏;
²使用大的泊松比时谨慎;
建议不用退化四面体单元,对于显式动力分析最好用映射网格,拖拉出的带金字塔形网格也可以。
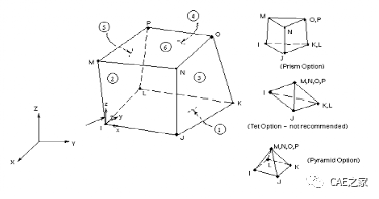
图3.5 SOLID164 8节点六面体单元
3.4.1.6 COMBI165弹簧阻尼单元
用两个节点定义,可以与所有其他单元联结,具有平动和扭动自由度。这种单元能够应用复杂的非线性力-位移关系。
由于COMBI165只具有弹簧与阻尼选项,对于弹簧阻尼组合体必须重叠两
个单元。
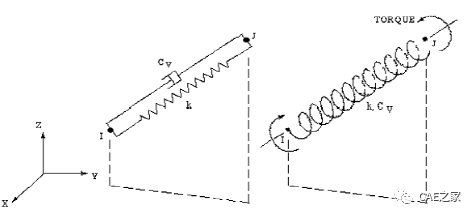
图3.6 COMBI165 弹簧阻尼单元
3.4.1.7MASS166 Mass Element
MASS 166 是一个有9个自由度的点质量单元:在x,y,z方向的平动、速度、加速度,单元还有针对旋转惯性,但没有质量的选项。这种单元用来整车碰撞建模,代替其中许多部件没有建模的大型模型质量。

图3.7 MASS166 Mass Element
3.4.1.8 LINK167 缆单元
三节点仅拉伸单元,第3个节点确定单元初始方向,用于缆绳建模,见图3.8。
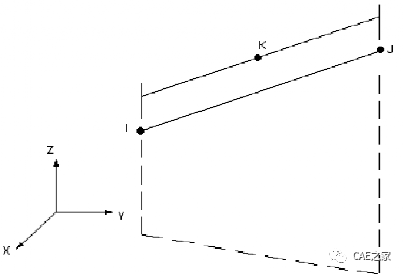
图3.8 LINK167 缆单元
3.4.2 单元划分时注意事项
l避免使用小的单元,以免缩小时间步长。如果要用,则同时使用质量缩放。
l减少使用三角形/四面体/棱柱单元。
l避免锐角单元与翘曲的壳单元,否则会降低计算精度。
l在需要沙漏控制的地方使用全积分单元。全积分六面体单元可能产生体积锁定(由于泊松比达到0.5)和剪切锁定 (例如,简支梁的弯曲)。
3.4.3 简化积分
LS-DYNA中所有的显式动力单元缺省为简化积分,一个简化积分单元是一个使用最少积分点的单元,一个简化积分块单元具有在其中心的一个积分点;一个简化壳单元在面中心具有一个积分点。而全积分块与壳单元分别具有8个和4个积分点。
在显式动力分析中最耗CPU的一项就是单元的处理,由于积分点的个数与CPU时间成正比,所有的显式动力单元缺省为简化积分,除了节省CPU,单点积分单元在大变形分析中同样有效,LS-DYNA单元能承受比隐式单元更大的变形。
简化积分单元有两个缺点:
l出现零能模式 (沙漏)。
l应力结果的精确度与积分点直接相关。
3.4.4 沙漏
沙漏是一种以比结构全局响应高的多的频率震荡的零能变形模式,沙漏模式导致一种在数学上是稳定的,但在物理上是不可能的状态。它们通常没有刚度,变形呈现锯齿形网格。
单点积分单元容易产生零能模式,沙漏的出现会导致结果无效,应尽量避免和减小。
如果总的沙漏能大于模型内能的10%,这个分析就有可能是失败的,有时侯即使5%也是不允许的。

图3.9 沙漏
LS-DYNA有以下方法控制沙漏:
1 避免单点载荷。单点载荷容易激发沙漏。
2 用全积分单元。全积分单元不会出现沙漏,用全积分单元定义模型的一部分或全部可以减少沙漏。
3 全局调整模型体积粘性。沙漏变形可以通过结构体积粘性来阻止,可以通过控制线性和二次系数,从而增大模型的体积粘性。
1.5 材料
LS-DYNA程序目前有100多种金属和非金属材料可供选择,如弹性、弹塑性、超弹性、塑性、泡沫、玻璃、地质、土壤、混凝土、流体、复合材料、炸药及起爆燃烧、刚性材料外,LS-DYNA还提供了接口,用户可以自定义材料,并可考虑材料失效、损伤、粘性、蠕变、与温度相关、与应变率相关等性质。
1.6 接触
LS-DYNA有22 种不同的接触类型,要选择合适的类型来描述实际物理系统往往比较困难,为了选择合适的接触类型,往往需要对LS-DYNA中的接触集 合和算法有深入的理解。
接触算法是程序用来处理接触面的方法。在LS-DYNA中有3种算法:
l单面接触
l点面接触
l面面接触
一个接触集 合为具有特别相似特性的接触类型的集 合,在LS-DYNA中有9种集 合:
l普通
l自动
l刚体
l固连
l固连失效
l侵蚀
l边
l拉延筋
l成型
3.6.1 单面接触
单面接触用于当一个物体的外表面与自身接触或和另一个物体的外表面接触时使用,单面接触是LS-DYNA中最通用的接触类型,因为程序将搜索模型中的所有外表面,检查是否相互发生穿透。由于所有的外表面都在搜索范围内,因此不需要定义接触面与目标面,在预先不知接触情况时,单面接触非常有用,见图3.10。
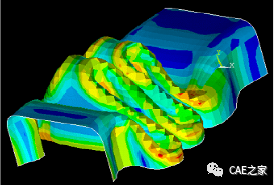
图3.10 单面接触
3.6.2点面接触
当一个接触节点碰到目标面时,点面接触发生,由于它是非对称的,所以是最快的算法。点面接触只考虑冲击目标面的节点。对于点面接触,必须指定接触面与目标面的节点组元或PART号。对于预先已知非常小的接触面,点面接触十分有效。对于节点接触刚体同样可以使用它,见图3.11。
在使用点面接触时,应注意以下几点:
l平面与凹面为目标面,凸面为接触面。
l粗网格为目标面,细网格为接触面。
对于Drawbead 接触,压延筋总是节点接触面,工件为目标面。
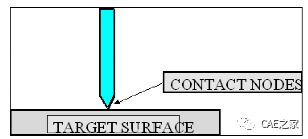
图3.11 点面接触
3.6.3面面接触
当一个物体的面穿透另一个物体的面时,使用面面接触算法,面面接触是完全对称的,因此接触面与目标面的选择是任意的,见图3.12。
对于面面接触, 需要用节点组元和PART号来定义接触面和目标面,节点可以从属于多个接触面。
面面接触是一种通用算法,通常用于在已知的接触对象是较大的面时。

图3.12 面面接触
3.6.4自动与普通接触
自动接触与普通接触的区别在于对壳单元接触力的处理方式不同,普通接触在计算接触力时不考虑壳的厚度,自动接触允许接触出现在壳元的两侧。
两种接触类型中的壳元接触力按照如下方法计算(见图3.13):

图3.13 自动接触与普通接触壳元接触力的计算方法
3.6.5侵蚀接触
当单元可能失效时用这种接触,侵蚀接触的目的是保证在模型外部的单元失效被删除后,剩下的单元依然能够考虑接触,见图3.14。
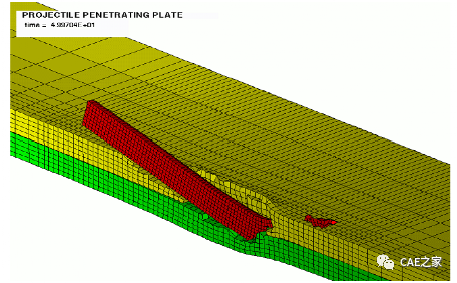
图3.14 侵蚀接触
3.6.6 刚体接触
通常用于多刚体动力学,变形体与刚体之间的接触必须用automatic 或 eroding contacts,见图3.15。

图3.15 刚体接触
3.6.7 边边接触
边边接触用于壳单元的法线与碰撞方向正交时,见图3.16。

图3.16 边边接触
3.6.8固连接触
接触被粘在一起,此接触经常用于销栓连接。当使用固连失效时,达到以下条件时固连就失效(见图3.17):

图3.17 固连接触
3.6.9拉延筋接触
通常用于板料成型,用于约束板料的运动。在类似冲压的板料成型过程中,通常会出现工件与模具之间失去接触(如起皱)。这种接触允许使用弯曲和摩擦阻力,用于确保工件在整个冲压过程中与压延筋始终保持接触。
3.6.10钣金成形类接触
成型接触是钣金成形分析中首选的类型,对于这些接触选项,冲头与模具通常定义为目标面,而工件则定义为接触面。
对于这些接触类型中模具无需网格贯通,因此减小接触定义的复杂性,模具网格的方向必须一致,成型接触选项基于自动接触类型,功能十分强大。
3.7 LS-DYNA输入数据格式
3.7.1 输入数据格式
在LS-DYNA程序93x以后的新版本中,输入数据采用新的输入格式——关键字格式,它将更加灵活和合理地组组输入数据,使新用户更方便地阅读输入数据。
在同一个关键字(KEYWORD)后聚集同一类功能的数据。例如,在关键字*ELEMENT后面,不仅包括实体单元、梁单元和壳单元,也包括弹簧单元、离散阻尼单元、安全带单元和集中质量。在92x老版本中,这些单元是分散定义的,并在用户手册中分开在不同部分。材料和接触算法用名字来说明,而不是数字,使数据更具可读性。
LS-DYNA用户手册是按关键字的字母顺序编写,每一个关键字后紧接一个数据块,构成一个数据组,每个数据组具有它特定的输入,如*CONTROL数据组用来重置缺省值,*MAT数据组定义材料本构常数,*EOS数据组定义状态方程,*ELEMENT数据组定义单元标识和节点联结数组、*PART数据组将材料、截面信息、状态方程、沙漏粘性/体粘性等集 合在一起,等等,几乎全部模型数据都可以用块形式输入。例如,以下数据为二个节点及其相应坐标数据,壳单元及其part号,壳单元的节点联结数组。
$
$ DEFINE TWO NODES
$
*NODE
10101 x y z
10201 x y z
$
$ DEFINE TWO SHELL ELEMENTS
$
*ELEMENT-SHELL
10201 pid n1 n2 n3 n4
10301 pid n1 n2 n3 n4
其中pid为part号。
一个数据组结束后紧接着下一个关键字,开始另一个数据组。一个关键字的第一个字符必须放在行的第一列。如果某一行的第一个字符是$,则标志该行是注释行(Commrnt),在数据读入时该行被省略。如果需要,每一种关键字可以多次定义成多个数据组。例如,可以将上述数据改写成如下形式输入:
$
$ DEFINE ONE NODE
$
*NODE
1010 x y z
$
$ DEFINE ONE SHELL ELEMENT
$
*ELEMENT-SHELL
10201 pid n1 n2 n3 n4
$
$ DEFINE ONE MORE NODE
$
*NODE
10201 x y z
$
$ DEFINE ONE MORE SHELL ELEMENTS
$
*ELEMENT-SHELL
10301 pid n1 n2 n3 n4
现用图3.19说明输入数据组织的一般原理,以及数据各部分的相互关系。
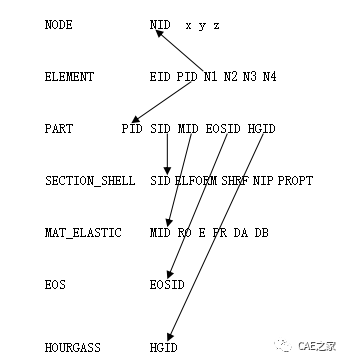
图3.19 关键字输入方式的数据组织
在图3.19中关键字*ELEMENT的数据组中,EID—单元号,PID—Part号,N1,N2,N3,N4—节点号NID,节点号NID在关键字*NODE的数据组中定义,在关键字*PART的数据组中,PID—Part号、SID—截面号、MID—材料号、EOSID—状态方程号、HGID—沙漏控制号,在关键字*SECTION—SHELL的数据组中,SID—截面号、ELFORM—单元算法、SHRF—剪切因子、NIP—沿壳单元厚度的积分点数,等等。在关键字*MAT的数据组中,定义各种单元类型的材料本构数据。它的状态方程数据在关键字*EOS的数组中定义。由于LS-DYNA程序中采用单点积分,造成零能模式,需要引入沙漏控制,有关数据在*HOURGLASS中定义。
在关键字输入阶段读入输入数据,仅限于检查和计算数据量,以便配置数组大小和重新排列。在输入第二阶段做更多的检查,并输出打印。LS-DYNA程序保留可以读入老版本无关键字输入数据文件的选择。输出数据如同早先版本一样记入输出数据文件(缺省文件名D3HSP)。曾试图做到在输入阶段遇到错误时仍能不停止程序运行,直到全部输入阶段结束。可惜,这常常是不可能的,程序可能在遇到一个出错信息时终止运行。用户经常应该从输出数据文件D3HSP或MESSAG文件中检查错误信息。
跟随关键字后面的输入数据,采用固定格式或自由格式,这二种方式可以混合输入,但不能在同一张卡片上采用二不同输入格式。
固定格式输入方式除网格数据(节点坐标数据*NODE(I8,3E16.0,2I8)和单元数据*ELEMENT(例如SOLID单元(10I8),BEAM单元(10I8),…)外,多数卡片都采用80个字符串,包括字长为10的8个数据,典型的数据卡如下:
表3.1 固定格式输入方式
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
Variable变量 | NSID | PSID | A1 | A2 | A3 | SASH | | |
Type数据类型 | I | I | F | F | F | I | | |
Default缺省值 | none | none | 1.0 | 1.0 | 0.0 | 1 | | |
Remark注释 | 1 | 2 | 3 | | | | | |
数据类型是I为整型数、F为实型数,缺省值是当输入数据为零或空白时程序自动置的值。
如果数据卡的数据格式不是上述典型格式,那么在用户手册中 特别说明。
自由格式输入方式采用逗号“,”分隔各个数据,并且输入数据的顺序必须与固定格式相同,其字符数不能超过相应固定格式规定的字符数。例如I8整型数限制最大数为99999999,超过这值将不能被接受。
特别要指出的是,顺序输入的数据,其数据类型不能弄错。
关键字可用大写,也可用小写,每一个关键开始的字符*必须放在该行的第1 列。
最常用的关键字见表3.2。全部关键字见LS-DYNA KEYWORD USER、S MANUAL VERSION 950。
表3.2 最常用的关键字
课目 | 数据 | 关键字KEYWORD |
几何网格 | 节点 | *NODE |
单元 | *ELEMENT—BEAM *ELEMENT—SHELL *ELEMENT—SOLID *ELEMENT—TSHELL | |
离散单元 | *ELEMENT—DISCRETE *ELEMENT—MASS *ELEMENT—SEATBELT—option | |
材料 | PART(将材料、截面性质、状态方程和沙漏数据集 合成一个PART) | *PART |
材料 | *MAT—option | |
截面性质 | *SECTION—BEAM *SECTION—SHELL *SECTION—SOLID *SECTION—TSHELL | |
离散截面性质 | *SECTION—DISCRETE *SECTION—SELTBELT | |
状态方程 | *EOS—option | |
沙漏控制 | *CONTROL—HOURGLASS *HOURGLASS | |
接触与刚性墙 | 接触的缺省值 | *CONTROL—CONTACT |
接触的定义 | *CONTACT—option | |
刚性墙的定义 | *RIGIDWALL—CPTION | |
约束(restraints) | *NODE*BOUNDARY—SPC—OPTICN | |
边界条件与载荷 | 重力(体力)载荷 | *LOAD—BODY—option |
节点载荷 | *LOAD—NODE | |
压力截荷 | *LOAD—SEGMEAL—option *LOAD—SHELL—option | |
热载荷 | *LOAD—THERMAL—option | |
载荷曲线 | *DEFINE—CURVE | |
约束 (CONSTRAINTST) 和焊点 | 约束点 | *CONSTRAINED—NODE—SET |
焊接 | *CONSTRAINED—GENERALIZED—WELD—option *CONSTRAINED—SPOT—WELD | |
铆接 | *CONSTRAINED—RIVET | |
输出控制 | 缺省值 | *CONTROL—option |
格式化时间历程文件 | *DATABASE—option | |
二进制图形文件、时间历程文件和重起动文件 | *DATABASE—BINARY—option | |
在时间历程块中的项目 | *DATABASE—HISTORY—option | |
节点反力的输出 | *DATABASE—NODAL—FORCE—GROUP | |
终止程序运行 | 终止时间 | *CONTROL—TERMINATION |
终止时步数 | *CONTROL—TERMINATION | |
CPU终止 | *CONTROL—CPU | |
自由度 | *TERMINATION—NODE |
3.9.2 文件管理和程序运行
在LS-DYNA程序运行时,可能输入的数据文件和输出的数据文件见图3.20所示

图3.20 LS-DYNA程序运行的文件组织
直接运行LS-DYNA,先通过前处理程序(如TrueGrid)形成输入数据文件,经检查无误,再在数据文件存放的子目录,键入:
LSDYNA970
屏幕显示:please define input file names or change default
>
则再键入:I=inf O=otf G=ptf D=dpf F=thf T=tpf A=rrd M=sif J=jif S=iff Z=isf2 B=rlf W=root E=efl X=scl C=CPU K=kill V=vda Y=c3d MEMORY=nwds {THERMAL} {COUPLE}
其中I=inf 用户编写的输入数据文件
O=otf 输入打印数据文件(缺省文件名D3HSP)
G=ptf 二进制绘图数据文件(缺省文件名D3PLOT)
D=dpf 用于重起动的DUMP文件(缺省文件名D3DUMP)
F=thf 用户选择数据的二进制时间历程图形文件(缺省文件名D3THDT)
U=xtf 附加的二进制时间历程图形文件(缺省文件名XTFILE)
T=tpf 任选的温度数据文件(热分析程序TOPAE3D的图形数据文件)
A=rrd 运行中记录的DUMP文件(缺省文件名RUNRSF)
M=sif 应力初始化文件(用户给定)
J=jif 任选的JOY程序输出的界面数据文件
S=iff 界面力数据文件(用户给定)
Z=isfl 待存贮的界面数据文件(用户给定)
L=isf2 已存贮供使用的界面数据文件(用户给定)
B=rlf 二进制动力松弛图形文件(缺省文件名D3DRFL)
W=root 一般打印选择的根文件名
X=scl scl为用于二进制文件大小的比例因子(缺省值=7)
C=CPU CPU为CPU限制值,单位为秒,为总的CPU计算机时,不是从重起动开始计算的CPU机时
K=kill 如果LS-DYNA3D程序遇到这个文件名,它将终止运算并记一个重起动文件
V=vda vda是:VDA/IGES程序的几何表面构形数据文件
Y=c3d c3d是CAL3D程序的输入数据文件
MEMORY=nwds nwds是允许的WORD数,在工作站上一个WORD通常是32bits
运行仅热分析,在执行行中应包括THERMAL,运行结构分析与热分析耦合,则在执行行中包括COUPLE。
每次LS-DYNA程序运行应该在分开的子目录中以避免文件混乱。在输入数据文件中第一行从第一列开始为*KEYWORD,则该输入数据文件为关键字格式的,否则是旧的格式化文件。MEMORY=nwds可填写在键入的执行行中任何位置,如果不填,则LS-DYNA程序将给出缺省的memory 大小。这种选择是需要的,如果缺省的Memory大小不够,程序将会终止运行。有时,也可能缺省值太大,这种选择可以用来降低memory大小。
文件名必须是唯一的。界面力文件仅仅在执行中给定时(S=iff)才建立。在一个大型作业中,一个采用缺省值大小的文件可能在一个单独文件中不能够存贮全部图形数据或重起动DUMP数据,因此,在执行行中采用X=scl来增加文件的大小。文件的缺省值大小是7乘以1000000个八进制字(262144)或1835008字(word),如果作业需要更大的文件存贮空间,建议相应地增加scl值,采用C=CPU定义允许使用的最大CPU时间(单位,秒),如果程序运行超过此给定的CPU时间,LS-DYNA3D程序将终止运行,并记录一个重起动文件。在程序重起动时,C=CPU中的CPU是给定总的程序运行CPU时间,包括重起动以前的CPU时间加上在重起动后允许运行的最大CPU时间。
从一个DUMP文件重起动LS-DYNA程序,键入
LSDYNA970
屏幕显示:please define input file names or change default:
再键入
I=inf O=otf G=ptf D=dpf R=rtf F=thf U=xtf T=tpf A=rrd J=jif S=iff Z=isf1 L=isf2 B=rlf W=root E=efl X=scl C=CPU K=kill Q=option MEMORY=nwds
其中R=rtf是重起动文件
自适应网格剖分后的重起动,命令行中应给定下列参数:
R=adapt.dump01,…
在Adapt.dump01…文件中包括重起动成功所需的所有信息。
如果上一次运行的数据被重新变换(remap)到一个新的网格,则要给定:Q=remap这个remap文件是一个dump文件,从这个文件可取得remapping data,但是这种remap选择仅适用于实体单元。
允许不填写某些文件名,程序自动取缺省文件名。例如,以下的执行行是可接受的:
I=inf R=rtf
输出数据文件、二进制图形数据文件DUMP文件的缺省文件名分别是D3HSP,D3PLOT,D3THDT和D3DUMP。
若采用界面(interface segments)数据进行分析计算,在第一次运行时执行行可写成:
I=inf Z=isf1
注意,在重起动时不能进行应力初始化处理,同时,VDA数据文件和CAL3D数据文件也不能改变。
3.9.3 重起动分析
LS-DYNA程序的重起动功能允许作户将整个作业的分析计算分成若干步完成。每一步计算结束前,程序将以后继续计算所必须的全部信息都记入dump文件。Dump文件的大小大概与计算所需的memory大小差不多。每一步的计算结果可以用后处理程序进行显示检查,以避免浪费不正确计算的机时。
在LS-DYNA程序重起动时将前一步计算的dump文件作为本次计算的重起动restart文件读入。重起动时读入输入数据文件允许用户删除不重要的、极度畸变的单元和材料以及已不再需要的接触界面,还可以改变各种数据的输出频率,经常,这些简单的修改允许复杂的计算过程行以成功的完成。
LS-DYNA程序的重起动输入数据文件格式见用户手册。每一步计算后都记录dump文件,其文件名分别为D3DUMP01,D3DUMP02…
D3DUMPnn,用户如果想从D3DUMPnn文件进行重起动计算,那么运行LS-DYNA3D程序后,键入执行为
I=重起动输入数据文件 R=D3 DUMPnn
LS-DYNA程序可以从任意的一个已经记录的DUMP文件处重新起动。当然,有用的输出文件应该给定新的文件名,以防止同名文件被复盖,也可以将已记录的输出文件换名。



