多体系统中运动副限位新设置方法
1 限位问题及传统解决方法
在现实世界中,很多部件的运动都有一定的位移限制条件,如液压缸中,活塞杆的伸缩运动受液压缸筒的尺寸限制,活塞不能脱离缸筒;还有一些产品收到外部因素的影响,运动也有一定的限制条件,比如门的旋转运动,由于墙壁的存在,门无法旋转180°,甚至只能旋转90°。
之前,在多体动力学软件中对这些产品进行建模时,无法直接设置运动的限制条件,通常采用的办法有:(1) 对运动副设置运动驱动,编写合适的驱动函数以确保部件运动合理;(2) 手动建立部件之间的接触力,限制物体的运动。例如,一个摇摆平台在力矩作用下做左右摆动运动,平台的右侧有障碍物,当平台右端运动到障碍物位置时就不能继续向右运动。使用Simpack软件模拟该问题时,可以使用单侧接触力元(18号力元)作为限位器,当平台右端的To Marker运动到障碍物位置的From Marker右侧时,触发接触碰撞,接触力把该平台弹回,实现限位作用。这种方法不需要真实的几何体。2 Simpack新的建模元件Connection从Simpack 2019版本开始,Simpack软件增加了一个全新的建模元件,即Connection,翻译中文为连接元件,其图标为 ,其功能一直在不断开发和完善。同时,还新增加了一个全新的建模元件初始条件Initial Conditions,图标为
,其功能一直在不断开发和完善。同时,还新增加了一个全新的建模元件初始条件Initial Conditions,图标为 ,用于配合Connection的建模。Connections是替代铰接和约束的另外一种建模元件,并且可以和铰接和约束之间相互替换,和铰接/约束的建模功能是相同的, 使用连接元件建立的模型,软件会自动转化为优化的铰接/约束元件模型,相比用户自己建立的铰接/约束模型,模型得到优化。
,用于配合Connection的建模。Connections是替代铰接和约束的另外一种建模元件,并且可以和铰接和约束之间相互替换,和铰接/约束的建模功能是相同的, 使用连接元件建立的模型,软件会自动转化为优化的铰接/约束元件模型,相比用户自己建立的铰接/约束模型,模型得到优化。在模型中建立连接元件的数量没有限制,在同一模型中可以和铰接、约束一起使用。连接元件的优势是:更简单的用户操作(不需要用户自己选择定义铰接或约束),能自动理想的模型运动树。
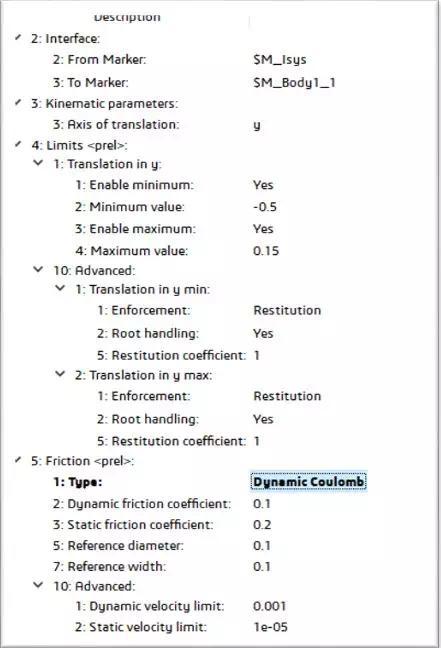
连接元件并不是和铰接/约束的功能完全一样,其有很多特有的新功能,限位设置就是其中的一个新功能,使用连接元件可以快速定义运动副的限位。连接元件的属性如下图所示。在该对话框中,除了可以定义标记点、自由度方向外,还能直接定义限位Limit和摩擦Friction。在限位设置中,可以定义最大和最小位移,还可以定义在限位发生时的处理方式,包括Restitution和Stiffness/Damping两种方法。通过定义惩罚系数或者刚度阻尼值,来实现碰撞效果,从而实现运动限位。在摩擦设置中,可以定义动态摩擦、静摩擦、粘滞摩擦或者没有摩擦,通过设置参数来定义运动副中的摩擦属性。通过使用连接元件可以快速定义部件运动的限位属性。例如在常见的液压缸的运动建模中,可以直接设置活塞杆的最大和最小行程,大大节省了建模时间。设置活塞杆的初始速度,其运动如下图所示。又例如一个单摆���型,在重力作用下向下旋转运动,设置接触的惩罚系数为0.8,这样每次弹回的角度都会减少,直至在地面上停止下来。Connection建模元件集成了铰接和约束建模的功能,但没有铰接和约束建模的限制。一些专业的铰接元件,如铁路建模的7号铰接,也都可以使用Connection元件来建立。现在,Connection连接建模元件是Simpack推荐使用建模方法。同时,使用Connection建模元件,也方便和达索3DExperience和CATIA软件实现集成,实现CAD-CAE一体化。